環境
この記事は以下の環境で動いています。
| 項目 | 値 |
|---|---|
| CPU | Core i5-8250U |
| Ubuntu | 16.04 |
| ROS | Kinetic |
| Gazebo | 7.0.0 |
インストールについてはROS講座02 インストールを参照してください。
またこの記事のプログラムはgithubにアップロードされています。ROS講座11 gitリポジトリを参照してください。
概要
armロボット用のsim環境を構築をします。アームの逆運動学を解くには数学的には6degだと必要十分に解けますが、moveitでは5、6、7自由度が解くには良いらしいです。
アームの形を確認する
ソースコード
urdfファイル:arm_robot.urdf
形の確認
rvizでの形状の確認
roscd arm_lecture/urdf/
roslaunch urdf_tutorial display.launch model:=arm_robot.urdf
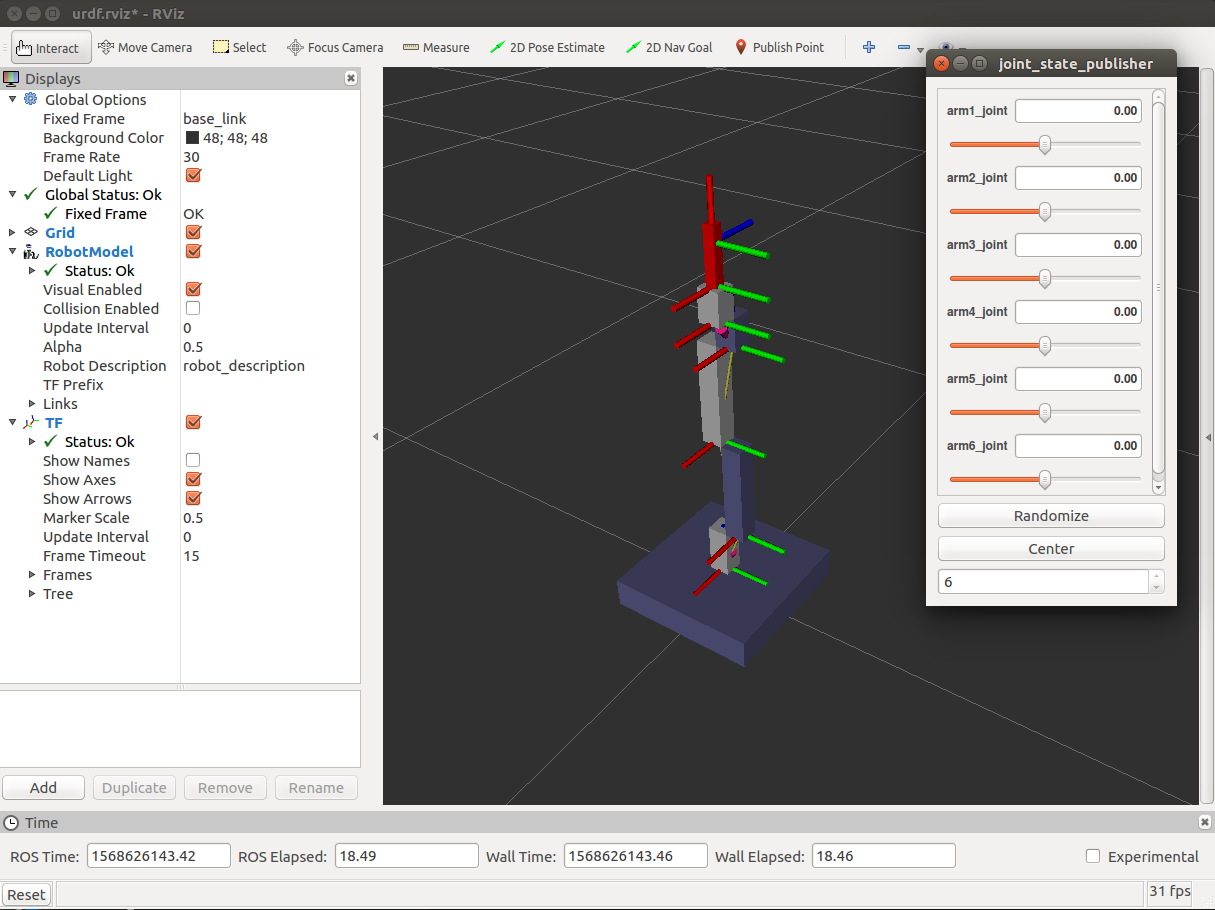
画像のように6軸のアームです。また最上部に位置指定用にtarget_linkがpitchを90度まわして設置しています。
- (1)yaw軸:台座(青灰)とリンク(灰)
- (2)pitch軸:リンク(灰)とリンク(青灰)
- (3)pitch軸:リンク(青灰)とリンク(灰)
- (4)pitch軸:リンク(灰)とリンク(青灰)
- (5)roll軸:リンク(青灰)とリンク(灰)
- (6)yaw軸:リンク(灰)とリンク(赤)
ros_controlの設定
回転軸は今まではros_controlの速度コントローラーでまわしていましたが、アームではeffort_controllers/JointTrajectoryControllerというインターフェイスを使ってすべての軸をまとめて1つのロボットとして動かします。また単純なtopicのIFとfollow_joint_trajectoryという名前のactionlibのIFの2つが発生します。
ソースコード
urdfファイル:arm_robot.urdf
先ほどのurdfにros_control関連のファイルを追加したものです。
arm_lecture/config/trajectory_controller.yaml
arm_robot_trajectory_controller:
type: effort_controllers/JointTrajectoryController
joints:
- arm1_joint
- arm2_joint
- arm3_joint
- arm4_joint
- arm5_joint
- arm6_joint
gains:
arm1_joint: {p: 100, d: 1, i: 1, i_clamp: 1}
arm2_joint: {p: 100, d: 1, i: 1, i_clamp: 1}
arm3_joint: {p: 100, d: 1, i: 1, i_clamp: 1}
arm4_joint: {p: 100, d: 1, i: 1, i_clamp: 1}
arm5_joint: {p: 100, d: 1, i: 1, i_clamp: 1}
arm6_joint: {p: 100, d: 1, i: 1, i_clamp: 1}
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
arm_lecture/launch/arm_robot_sim.launch
<?xml version="1.0" ?>
<launch>
<arg name="model" default="$(find arm_lecture)/urdf/arm_robot_sim.urdf" />
<param name="robot_description" textfile="$(arg model)" />
<!-- gazebo world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
</include>
<!-- gazebo model -->
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-param robot_description -urdf -model arm_robot" />
<rosparam file="$(find arm_lecture)/config/trajectory_controller.yaml" command="load"/>
<node name="arm_robot_controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" args="arm_robot_trajectory_controller joint_state_controller"/>
</launch>
実行
roslaunch arm_lecture arm_robot_sim.launch
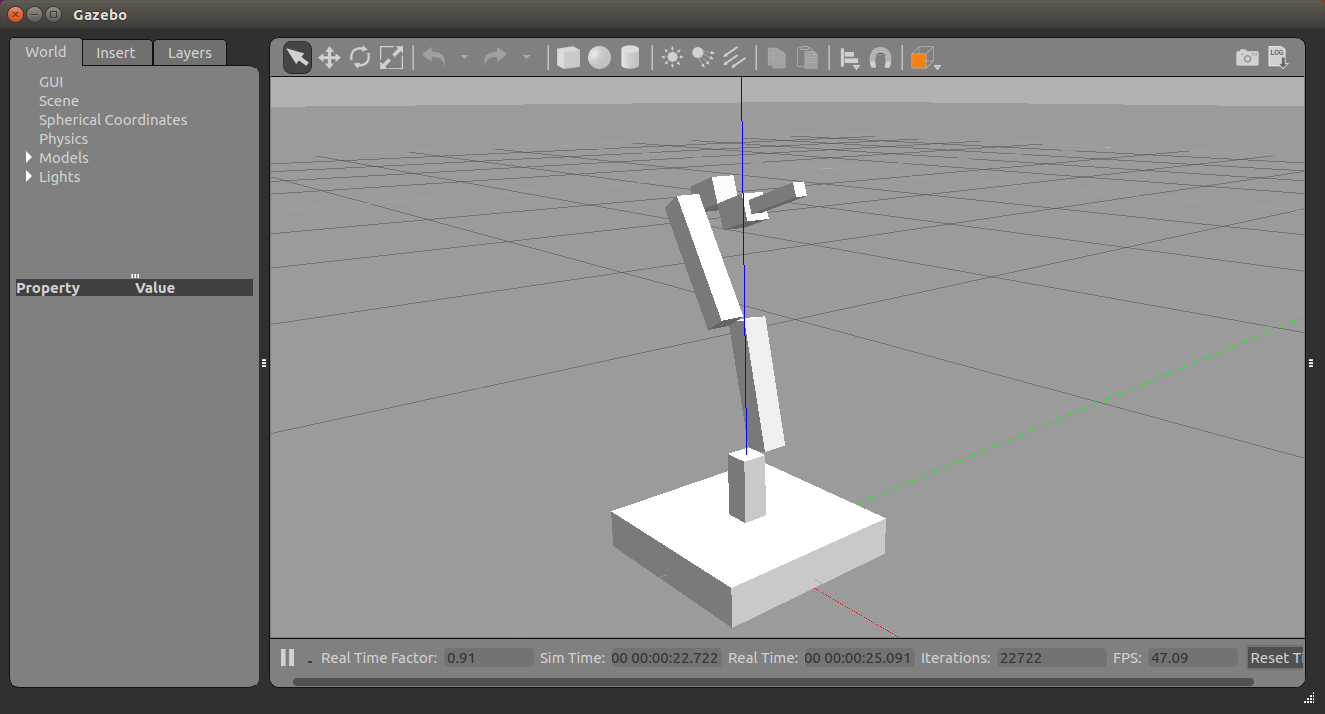
初期状態はまっすぐ上のはずですが、大体これぐらい曲がったところで止まっています。これはgazeboにモデルが出てくるのとros_controlがロードされるのにタイムラグがあるために、その間に軸が自重で落ちるからです。
軸に指令を送る。
前述したJointTrajectoryControllerの型で軸に指令を送ってみます。
ソースコード
arm_lecture/scripts/joint_trajectory_publisher.py
# !/usr/bin/env python
# license removed for brevity
import rospy
import math
from std_msgs.msg import String
from trajectory_msgs.msg import JointTrajectory, JointTrajectoryPoint
def talker():
rospy.init_node('joint_trajectory_publisher', anonymous=True)
pub = rospy.Publisher('arm_robot_trajectory_controller/command', JointTrajectory, queue_size=10)
rospy.sleep(0.5)
msg = JointTrajectory()
msg.header.stamp = rospy.Time.now()
msg.joint_names = [ "arm1_joint", "arm2_joint", "arm3_joint", "arm4_joint", "arm5_joint", "arm6_joint" ]
msg.points = [JointTrajectoryPoint() for i in range(6)]
msg.points[0].positions = [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
msg.points[0].time_from_start = rospy.Time(1.0)
msg.points[1].positions = [0.0, math.pi/6.0, math.pi/6.0, math.pi/6.0, 0.0, 0.0]
msg.points[1].time_from_start = rospy.Time(2.0)
msg.points[2].positions = [0.5, math.pi/6.0, math.pi/6.0, math.pi/6.0, 0.5, 0.0]
msg.points[2].time_from_start = rospy.Time(3.0)
msg.points[3].positions = [-0.5, math.pi/6.0, math.pi/6.0, math.pi/6.0, -0.5, 0.0]
msg.points[3].time_from_start = rospy.Time(4.0)
msg.points[4].positions = [0.0, math.pi/6.0, math.pi/6.0, math.pi/6.0, 0.0, 0.0]
msg.points[4].time_from_start = rospy.Time(5.0)
msg.points[5].positions = [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
msg.points[5].time_from_start = rospy.Time(6.0)
pub.publish(msg)
rospy.sleep(0.5)
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException: pass
実行
1つ目のターミナル
roslaunch arm_lecture arm_robot_sim.launch
2つ目のターミナル
rosrun arm_lecture joint_trajectory_publisher.py
参考
joint_trajectory_controllerのリファレンス