環境
この記事は以下の環境で動いています。
| 項目 | 値 |
|---|---|
| CPU | Core i5-8250U |
| Ubuntu | 20.04 |
| ROS | Noetic |
インストールについてはROS講座02 インストールを参照してください。
またこの記事のプログラムはgithubにアップロードされています。ROS講座11 gitリポジトリを参照してください。
概要
Rvizの画面上に以下のようにマーカーを置くことができます。物体を置けるという点ではurdと似ていますが、VisualizationMarkerのほうがROSトピック経由で手軽にプログラムから形を指示出来て、またRviz上でのチェックで表示の切り替えを個別に行うこともできます。
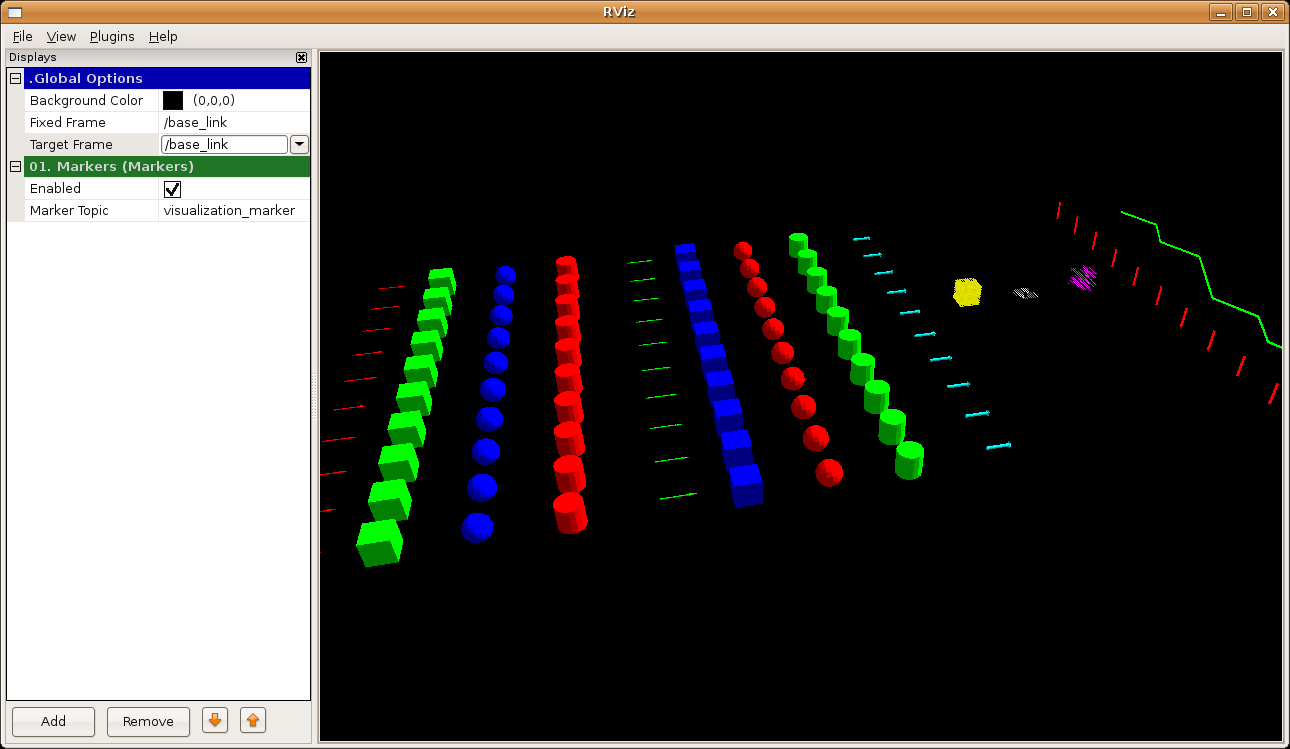
画像はROSWikiより
例1(直方体を出す)
プログラム
# include <ros/ros.h>
# include <visualization_msgs/Marker.h>
# include <string>
# include <math.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "info_marker_publisher1");
ros::NodeHandle nh;
// publisher
ros::Publisher marker_pub = nh.advertise<visualization_msgs::Marker>("marker", 1);
ros::Rate loop_rate(10);
while (ros::ok())
{
visualization_msgs::Marker marker;
marker.header.frame_id = "world";
marker.header.stamp = ros::Time::now();
marker.ns = "basic_shapes";
marker.id = 0;
marker.type = visualization_msgs::Marker::CUBE;
marker.action = visualization_msgs::Marker::ADD;
marker.lifetime = ros::Duration();
marker.scale.x = 0.5;
marker.scale.y = 0.5;
marker.scale.z = 0.2;
marker.pose.position.x = 0;
marker.pose.position.y = 0;
marker.pose.position.z = 0;
marker.pose.orientation.x = 0;
marker.pose.orientation.y = 0;
marker.pose.orientation.z = 0;
marker.pose.orientation.w = 1;
marker.color.r = 0.0f;
marker.color.g = 1.0f;
marker.color.b = 0.0f;
marker.color.a = 1.0f;
marker_pub.publish(marker);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
Markerは設定項目が多いのですが、難しい項目はありません
- header系
- header.frame_id:位置の基準となるtfのフレームを指定します。
例えばworldフレームの中の定位置にmarkerを出したいのかなのか、常にロボットの正面に出現させたいのかをこれで指定します。 - header.stamp:多分設定しなくてもよさそうな感じがしていますが、現在時刻「ros::Time()」を入れておきます。
- marker.ns, marker.id:マーカーの名前を指定します。visualization markerは後で消したり、上書きができる仕様になっています。nsとidの両方が一致していると同じものと判定されます。
- header.frame_id:位置の基準となるtfのフレームを指定します。
- 種類系
- marker.type:表示するmarkerの種類を指定します。詳しくは参考のROSwikiを見てください。
- marker.action:markerへの操作を指定します。とりあえずvisualization_msgs::Marker::ADDを指定しておけば問題ありません。
- lifetime:markerの表示を持続する時間です。とりあえず無限「ros::Duration()」を指定すれば問題ありません。
- 位置、大きさ、色(以下はtypeがCUBE、SPHERE、CYLINDERの場合の説明です)
- scale:大きさを指定します。
- pose.position:位置を指定します。
- pose.orientation:姿勢を指定します。(x,y,z,w)=(0,0,0,1)が回転なしです。
- color:色を指定します。color.aは透明率で、0は完全に透明(見えない)、1が不透明です。
以下にこれらのノードを起動するためのlaunchを載せます。
<launch>
<arg name="rvizconfig" default="$(find info_lecture)/rviz/marker1.rviz" />
<node name="info_marker_publisher1" pkg="info_lecture" type="info_marker_publisher1" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(arg rvizconfig)" required="true" />
</launch>
実行&Rvizの設定
roslaunchを起動しましょう。各ターミナルごとに実行前にsource ~/catkin_ws/devel/setup.bashを実行する必要があります。
roslaunch info_lecture marker1.launch
ここでrostopic echo /markerとするとVisualizationMarkerのROSトピックがpublishされているのが見えます。
header:
seq: 204
stamp:
secs: 1589013229
nsecs: 920559500
frame_id: "world"
ns: "basic_shapes"
id: 0
type: 1
action: 0
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
scale:
x: 0.5
y: 0.5
z: 0.2
color:
r: 0.0
g: 1.0
b: 0.0
a: 1.0
lifetime:
secs: 0
nsecs: 0
frame_locked: False
points: []
colors: []
text: ''
mesh_resource: ''
mesh_use_embedded_materials: False
CLI上の表示だけでは何なのかわかりずらいのでRviz上での表示を見てみましょう。
もしros_lectureのgitリポジトリを使用している場合はrvizの表示設定が読み込まれるのでmarkerが表示されますが、そうでない場合はRvizの設定が必要です。
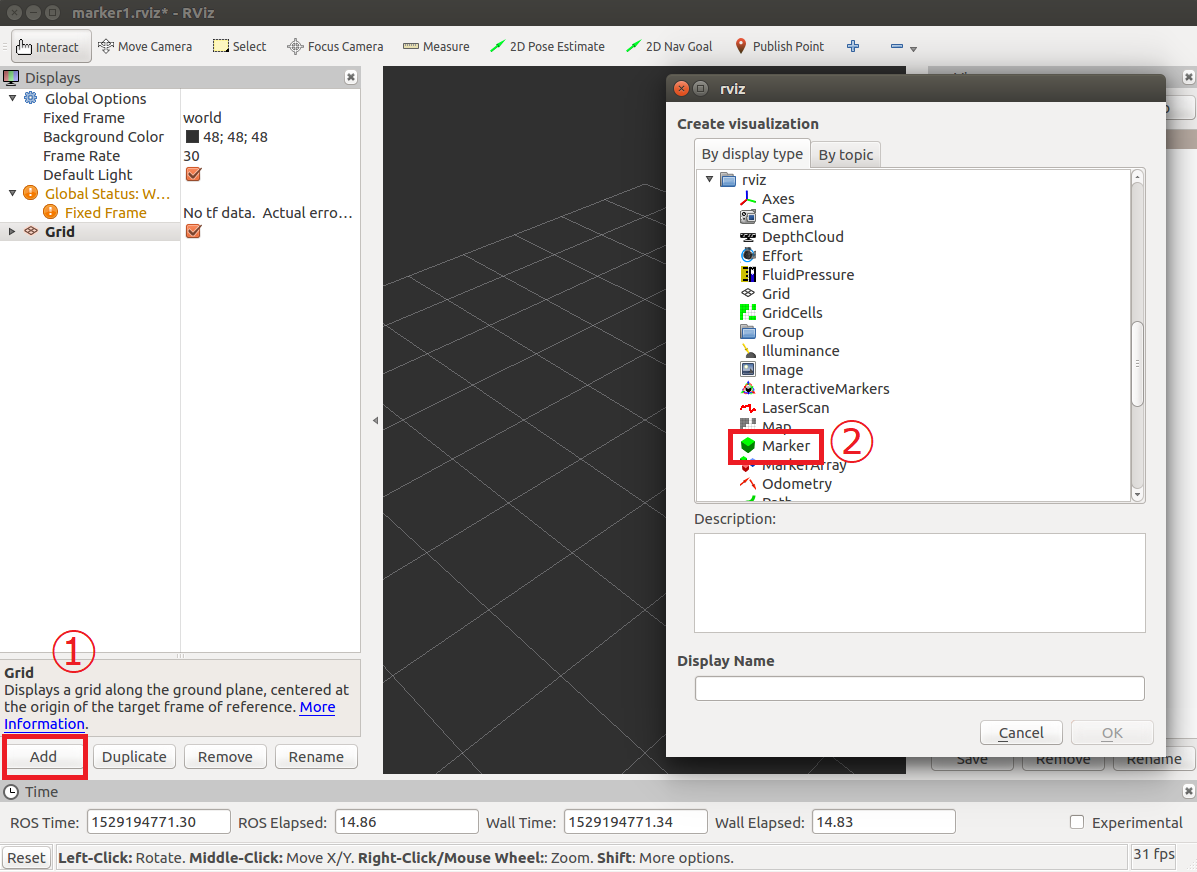
まずRvizでvisualization markerを追加します。画面左下の「Add」を押して、出てくる画面で「Marker」を選択します。
Fixed Frameをworldに設定、Marker Topicにvisualization markerをpublishしているtopic名の「/marker」を入れます。
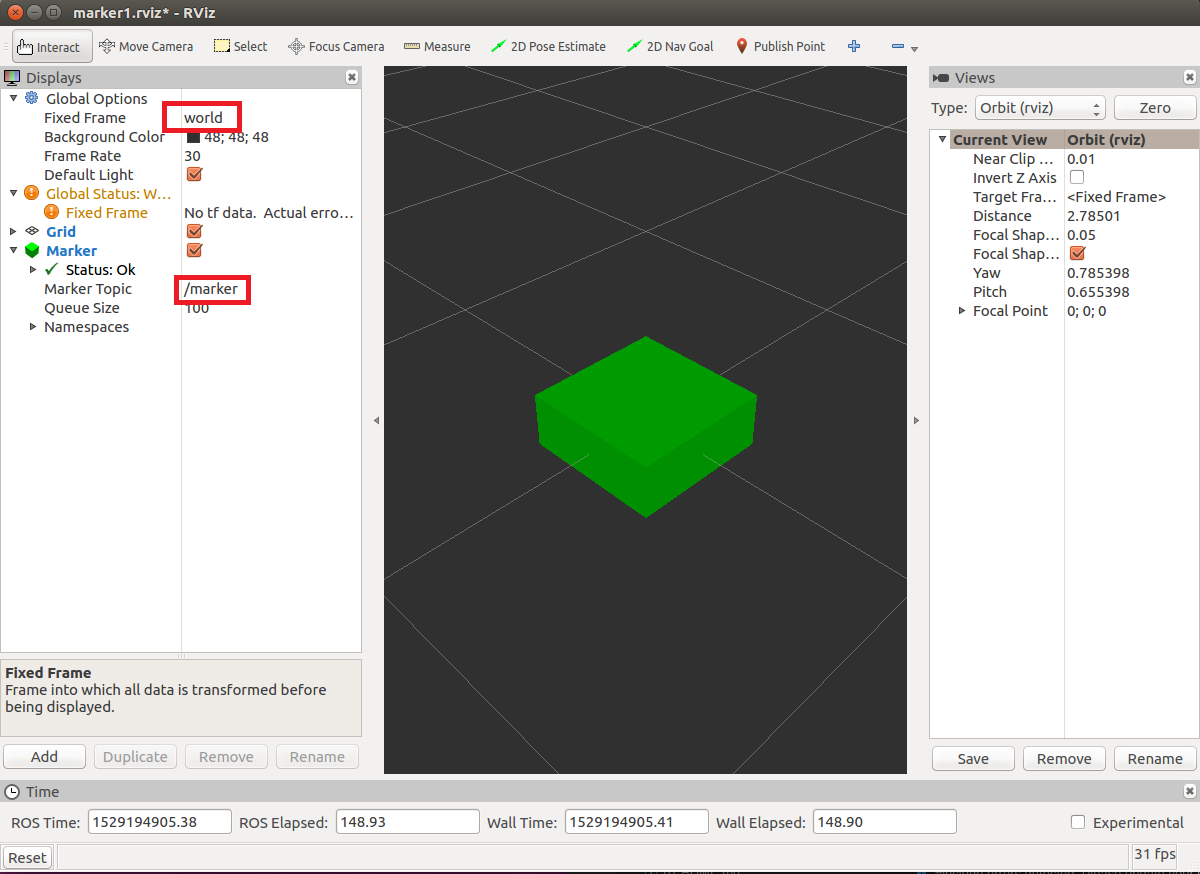
見事にmarkerを表示することができました。
例2(矢印を動的に表示)
次に複数のmarkerの表示をしてみます。上記の例1で使用したMarkerを複数回publishすることでも実現できますが、あまり数が多すぎるとこの方法ではrvizの制約で正しくで表示されないことがあります。visualization_msgs::Markerの代わりにvisualization_msgs::MarkerArrayを使ってみます。これを使うと数多くのMarkerを扱うことができます。
MarkerArrayはその名の通り、Markerが配列になっているものです。複数のマーカーを1つのpublisherで作成できます。
今回は動的に表示が変わるMarkerを作ります。前に作った移動ロボットのシミュレーションで速度指示を可視化してみます。
プログラム
# include <ros/ros.h>
# include <geometry_msgs/Twist.h>
# include <visualization_msgs/MarkerArray.h>
# include <string>
# include <math.h>
geometry_msgs::Twist twist_last;
void twist_callback(const geometry_msgs::Twist& twist_msg)
{
twist_last = twist_msg;
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "info_marker_publisher2");
ros::NodeHandle nh;
// publisher
ros::Publisher marker_pub = nh.advertise<visualization_msgs::MarkerArray>("marker_array", 1);
// subscriber
ros::Subscriber twist_sub = nh.subscribe("/cmd_vel", 10, twist_callback);
ros::Rate loop_rate(10);
while (ros::ok())
{
float length = sqrt(pow(twist_last.linear.x, 2) + pow(twist_last.linear.y, 2));
float angle = atan2(twist_last.linear.y, twist_last.linear.x);
geometry_msgs::Point linear_start;
linear_start.x = 0.3 * cos(angle);
linear_start.y = 0.3 * sin(angle);
linear_start.z = 0;
geometry_msgs::Point linear_end;
linear_end.x = (0.3 + length) * cos(angle);
linear_end.y = (0.3 + length) * sin(angle);
linear_end.z = 0;
geometry_msgs::Point angular_start;
angular_start.x = 0.3;
angular_start.y = 0;
angular_start.z = 0;
geometry_msgs::Point angular_end;
angular_end.x = 0.3;
angular_end.y = 0 + 0.3 * twist_last.angular.z;
angular_end.z = 0;
geometry_msgs::Vector3 arrow; // config arrow shape
arrow.x = 0.02;
arrow.y = 0.04;
arrow.z = 0.1;
visualization_msgs::MarkerArray marker_array;
marker_array.markers.resize(2);
// marker0
marker_array.markers[0].header.frame_id = "/base_link";
marker_array.markers[0].header.stamp = ros::Time::now();
marker_array.markers[0].ns = "cmd_vel_display";
marker_array.markers[0].id = 0;
marker_array.markers[0].lifetime = ros::Duration();
marker_array.markers[0].type = visualization_msgs::Marker::ARROW;
marker_array.markers[0].action = visualization_msgs::Marker::ADD;
marker_array.markers[0].scale = arrow;
marker_array.markers[0].points.resize(2);
marker_array.markers[0].points[0] = linear_start;
marker_array.markers[0].points[1] = linear_end;
marker_array.markers[0].color.r = 0.0f;
marker_array.markers[0].color.g = 1.0f;
marker_array.markers[0].color.b = 0.0f;
marker_array.markers[0].color.a = 1.0f;
// marker1
marker_array.markers[1].header.frame_id = "/base_link";
marker_array.markers[1].header.stamp = ros::Time::now();
marker_array.markers[1].ns = "cmd_vel_display";
marker_array.markers[1].id = 1;
marker_array.markers[1].lifetime = ros::Duration();
marker_array.markers[1].type = visualization_msgs::Marker::ARROW;
marker_array.markers[1].action = visualization_msgs::Marker::ADD;
marker_array.markers[1].scale = arrow;
marker_array.markers[1].points.resize(2);
marker_array.markers[1].points[0] = angular_start;
marker_array.markers[1].points[1] = angular_end;
marker_array.markers[1].color.r = 1.0f;
marker_array.markers[1].color.g = 0.0f;
marker_array.markers[1].color.b = 0.0f;
marker_array.markers[1].color.a = 1.0f;
marker_pub.publish(marker_array);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
- MarkerArrayはただMarkerが配列になっているだけのものです。
visualization_msgs::MarkerArray marker_arrayで変数を宣言した後にmarker_array.markers.resize(2)として配のサイズを変更します。この辺りはstdコンテナそのままです。こうすることでvisualization_msgs::Marker型の変数marker_array.markers[0]とmarker_array.markers[1]が使えるようになります。 -
marker_array.markers[0]ではtwistのlinear.x、linear.y成分を緑の矢印で、marker_array.markers[1]ではtwistのangular.z成分を赤の矢印で表示します。 - 今回のmarkerでは矢印を表示します。矢印の表示の仕方は2種類あるのですが、今回はそのうちの始点と終点を指定する方式を使います。始点と終点の2点を指定するために
marker_array.markers[0].points.resize(2)でpoint[0]とpoint[1]を作ります。それぞれが始点と終点の座標を表すPoint型の変数になります。 - 矢印の大きさは
scaleのフィールドで指定します。矢印の場合はちょっと変わっていて以下のことを表しています。- scale.xで矢印の軸の直径
- scale.xで矢印の傘の底面の直径
- scale.xで矢印の傘の高さ
- またVisualizationMarkerは
nsとidで識別されています。markers[0]とmarkers[1]でこの2つのフィールドが同一だと上書きしてしまいます。
<launch>
<arg name="model" default="$(find vis_lecture)/urdf/move_robot.urdf" />
<arg name="rvizconfig" default="$(find info_lecture)/rviz/marker2.rviz" />
<arg name="joy" default="false" />
<param name="robot_description" command="$(find xacro)/xacro.py $(arg model)" />
<group if="$(arg joy)">
<node name="joy_node" pkg="joy" type="joy_node" />
<node name="twist_publisher" pkg="basic_lecture" type="basic_twist_publisher"/>
</group>
<node name="info_marker_publisher2" pkg="info_lecture" type="info_marker_publisher2" />
<node name="vis_robot_sim" pkg="vis_lecture" type="vis_robot_sim"/>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(arg rvizconfig)" required="true" />
</launch>
実行&Rvizの設定
ジョイスティックをつないでください。各ターミナルごとに実行前にsource ~/catkin_ws/devel/setup.bashを実行する必要があります。
roslaunch info_lecture marker2.launch joy:=true
もしros_lectureのgitリポジトリを使用している場合はrvizの表示設定が読み込まれるのでmarkerが表示されますが、そうでない場合はRvizの設定が必要です。
ロボットの表示方法はROS講座18を見てください。
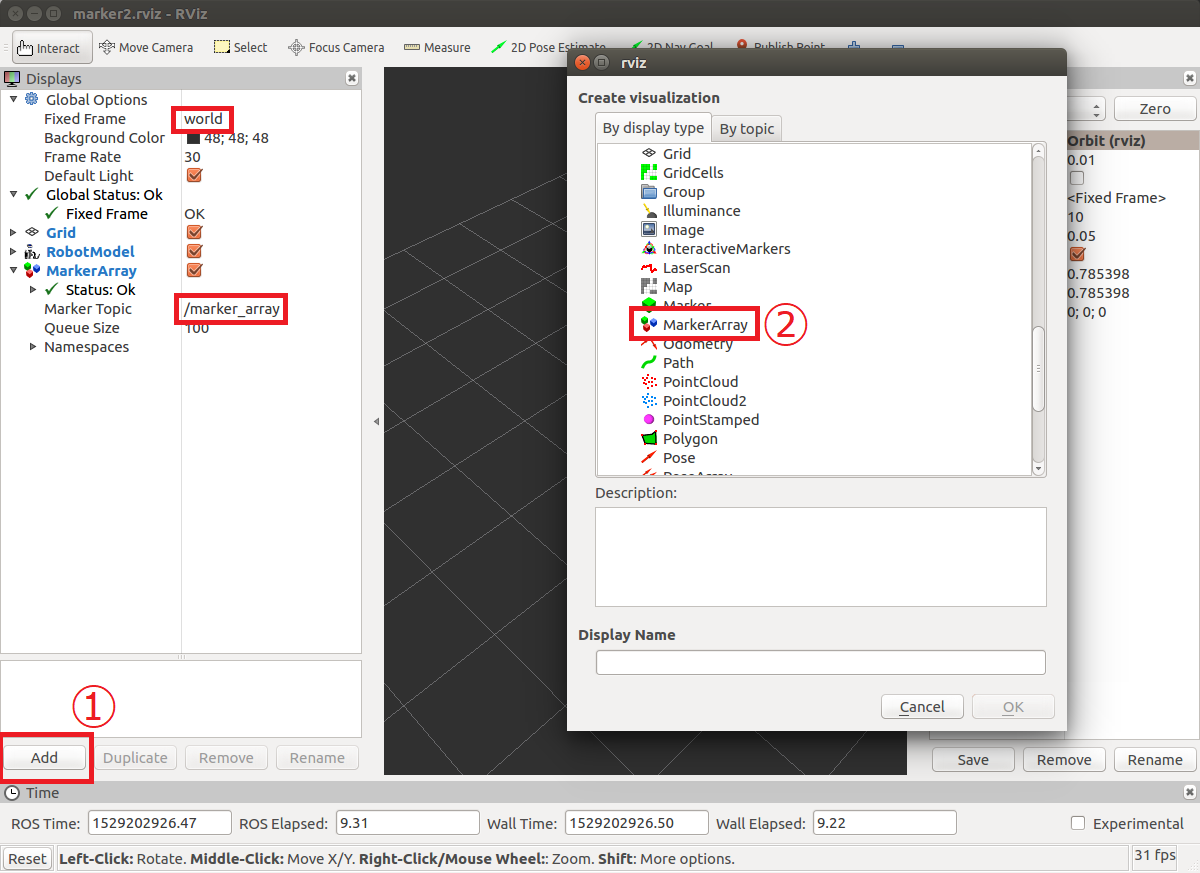
次にmarker_arrayをまずRvizでvisualization markerを追加します。画面左下の「Add」を押して、出てくる画面で「MarkerArray」を選択します。
Fixed Frameをworldになっていることを確認。またMarker Topicにvisualization marker_arrayをpublishしているtopic名の「/marker_array」を入れます。
これによって見事にmarkerを表示することができました。joyで操作している画面を張っておきます。
