環境
この記事は以下の環境で動いています。
| 項目 | 値 |
|---|---|
| CPU | Core i5-8250U |
| Ubuntu | 20.04 |
| ROS | Noetic |
インストールについてはROS講座02 インストールを参照してください。
またこの記事のプログラムはgithubにアップロードされています。ROS講座11 gitリポジトリを参照してください。
概要
Rviz上で移動ロボットのシミュレーターを作ってみましょう。本当はROS上ではシミュレーションはgazeboを使うのですが、今回は簡易的にc++で運動を記述したROSノードを作り動かしてみます。
オムニホイールのロボットを今回想定します。オムニホイールはこの動画のように前後移動と旋回に加えて、左右にも移動できる不思議な機構です。
今回はROSトピックで前後方向(x軸)速度、左右方向(y軸)速度、回転(Rz軸)角速度を指定してロボットを動かします。
この時
V_x:前後方向速度(ロボット座標系)\\
V_y:左右方向速度(ロボット座標系)\\
W_z:回転角速度(ロボット座標系)\\
\Delta t:処理のタイムステップ
また、あるタイムステップiの時の位置を
x_i:x軸位置(ワールド座標系)\\
y_i:y軸位置(ワールド座標系)\\
\theta_i:回転方向位置:向いている方角(ワールド座標系)\\
とすると、移動のシミュレーションは
x_{i+1}=x_i+(V_x cos(\theta_i+W_z \Delta t/2)-V_y sin(\theta_i+W_z \Delta t/2)) \Delta t\\
y_{i+1}=y_i+(V_x sin(\theta_i+W_z \Delta t/2)+V_y cos(\theta_i+W_z \Delta t/2)) \Delta t\\
\theta_{i+1}=\theta_i+W_z \Delta t\\
となる。これをこのまま実装していく
ソースコード
移動シミュレーション
# include <ros/ros.h>
# include <geometry_msgs/Twist.h>
# include <geometry_msgs/Pose2D.h>
# include <tf/transform_broadcaster.h>
# include <string>
# include <math.h>
void robot_pose_publish(geometry_msgs::Pose2D pose)
{
static tf::TransformBroadcaster br;
tf::Transform transform;
transform.setOrigin(tf::Vector3(pose.x, pose.y, 0.0));
tf::Quaternion q;
q.setRPY(0, 0, pose.theta);
transform.setRotation(q);
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", "base_link"));
}
geometry_msgs::Pose2D robot_tick(geometry_msgs::Pose2D pose, geometry_msgs::Twist cmd_vel, float dt)
{
geometry_msgs::Pose2D output;
float tmp_rz = pose.theta + cmd_vel.angular.z * dt / 2;
output.x = pose.x + (cos(tmp_rz) * cmd_vel.linear.x - sin(tmp_rz) * cmd_vel.linear.y) * dt;
output.y = pose.y + (sin(tmp_rz) * cmd_vel.linear.x + cos(tmp_rz) * cmd_vel.linear.y) * dt;
output.theta = pose.theta + cmd_vel.angular.z * dt;
return output;
}
geometry_msgs::Twist twist_last;
void twist_callback(const geometry_msgs::Twist& twist_msg)
{
twist_last = twist_msg;
}
float normal_rad(float value)
{
if (value > 0)
return fmod(value, 3.1415);
else
return -fmod(-value, 3.1415);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "vis_robot_sim");
ros::NodeHandle nh;
ros::Subscriber twist_sub = nh.subscribe("/cmd_vel", 10, twist_callback);
geometry_msgs::Pose2D pose;
ros::Rate loop_rate(20);
while (ros::ok())
{
pose = robot_tick(pose, twist_last, 0.05);
robot_pose_publish(pose);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
urdf
ただ円柱状の本体があるだけのロボットです。
<robot name="test_robot">
<material name="red">
<color rgba="1.0 0.0 0.0 1.0"/>
</material>
<material name="green">
<color rgba="0.0 1.0 0.0 1.0"/>
</material>
<link name="world"/>
<joint name="base_joint" type="floating">
<parent link="world"/>
<child link="base_link"/>
</joint>
<link name="base_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0.05"/>
<geometry>
<cylinder radius="0.15" length="0.10" />
</geometry>
<material name="red"/>
</visual>
</link>
<joint name="joint1" type="fixed">
<parent link="base_link"/>
<child link="link1"/>
</joint>
<link name="link1">
<visual>
<origin rpy="0 0 0" xyz="0.1 0 0.12"/>
<geometry>
<box size="0.07 0.07 0.07" />
</geometry>
<material name="green"/>
</visual>
</link>
</robot>
launch
cmd_velをpublishするためにbasic_lectureでturtlesimを動かすために使用したノードを再利用する。
<launch>
<arg name="model" default="$(find vis_lecture)/urdf/move_robot.urdf" />
<arg name="rvizconfig" default="$(find vis_lecture)/rviz/move_robot.rviz" />
<arg name="joy" default="false" />
<param name="robot_description" command="$(find xacro)/xacro $(arg model)" />
<group if="$(arg joy)">
<node name="joy_node" pkg="joy" type="joy_node" />
<node name="basic_twist_publisher" pkg="basic_lecture" type="basic_twist_publisher"/>
</group>
<node name="vis_robot_sim" pkg="vis_lecture" type="vis_robot_sim"/>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(arg rvizconfig)" required="true" />
</launch>
実行
各ターミナルごとに実行前にsource ~/catkin_ws/devel/setup.bashを実行する必要があります。
roslaunch vis_lecture move_robot.launch
コマンドを打つと以下のようなRvizの画面が立ち上がる。
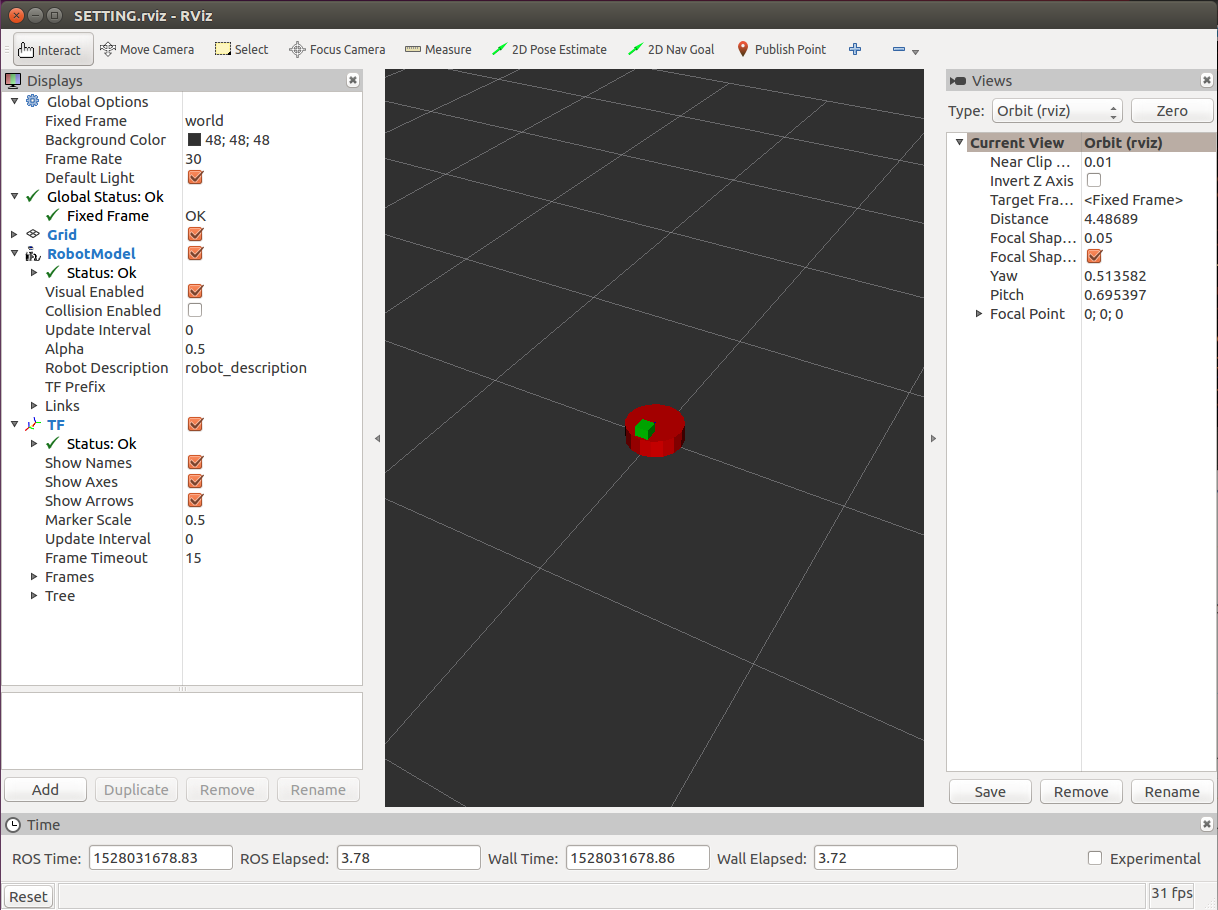
ここで別のウィンドウを開いてrostopic pubで以下のROSトピックをpublishしてみる。ロボットが動くはず。
rostopic pub -1 /cmd_vel geometry_msgs/Twist "linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
今度はjoyスティックを使用してみよう。PS3のコントローラーをつないで以下のコマンドを実行してみる。joy変数にtrueを入れることで追加でjoy_nodeとtwist_publisherを立ち上げる。以下の動画のようにジョイスティックで自由に動かせるはずだ。
roslaunch vis_lecture move_robot.launch joy:=true

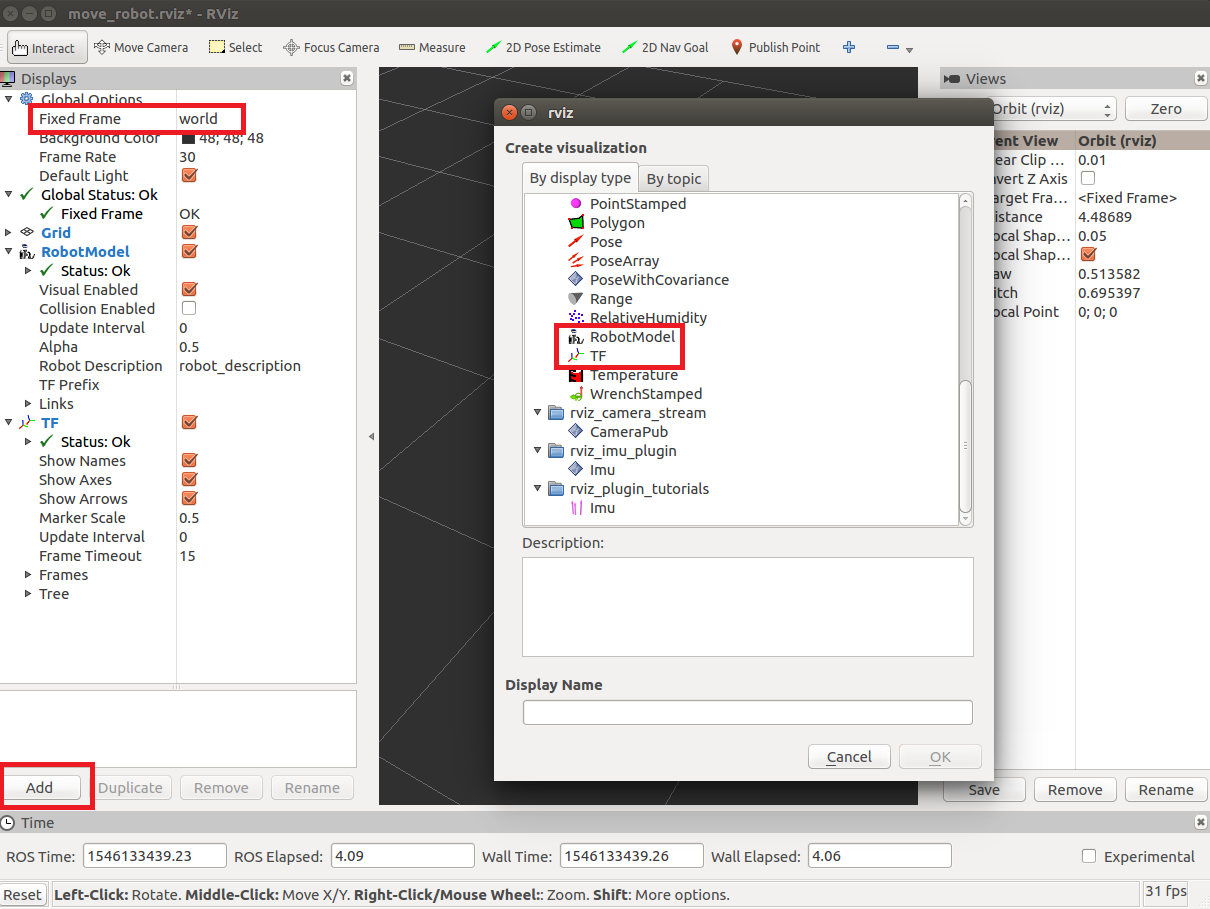
rvizの設定
rvizがうまく表示できないときは
- FixedFrameでworldを選択する。
- 左下のaddを押してTFを選択する。
- 左下のaddを押してRobotModelを選択する。
を設定すると上記のようになります。