はじめに
先日、Claude Codeを用いて交通事故統計を分析した記事を公開しました。そこでは、人間がAIを「高度な対話型ツール」として用いることで、2030年の交通死者数半減目標に対する構造的な遅れを浮き彫りにしました。
今回はその発展形として、近年研究が盛んな「自律型データ分析エージェント」を交通事故統計分析に適用した内容となります。OpenAIが提唱する「6層のコンテキスト」を参考にした簡易的な設計・実装と、そこから得られた分析結果と考察をまとめていきます。
想定読者
- AIエージェントを使ったデータ分析に興味がある方
- モビリティ・交通安全領域のデータサイエンスに関心がある方
1. 交通死亡事故「半減・ゼロ」を阻む課題
日本の交通安全における至上命題は、2030年までに年間死者数を1,500人以下に削減することです。しかし、警察庁の統計データを追うと、この目標達成には大きな壁が立ち塞がっていることがわかります。
単にデータを集計するだけでは、真の課題は見えてきません。なぜなら、交通データには以下のような「ドメイン特有の複雑な文脈」が絡み合っているからです。
- 外的要因のノイズ: 2020年のデータはコロナ禍による異例の交通量減少の影響を受けており、単純な年次比較を歪ませています。
- 技術介入の逆説: 安全技術(ADAS等)の普及が進むほど、統計上の数字が直感と逆方向に動く逆説的なバイアスが生じます。単純に数値を比較すると、誤った結論を導きやすい領域です。
- 法整備とカテゴリの変化: 2024年の法改正による「特定小型原付」の登場など、集計カテゴリそのものが年々変化しています。
これらの「文脈」を無視して数字だけを追えば、誤った施策を導き出す危険性があります。
2. AIエージェントの研究動向と「14%の壁」
実社会への普及
データ分析エージェントの実装は、大きく2つの方向から進んでいます。
① プラットフォーム内蔵型: データ基盤そのものがエージェント機能を取り込む動きです。Snowflake は「Cortex Agents」(2025年11月 GA)で構造化・非構造化データをまたいだマルチステップ推論を実現し、Databricks は「Genie Agent Mode」(2026年4月)で「なぜQ3の解約率が上昇したのか」のような開放型の問いに対して仮説検証を反復するエージェントを提供しています。DWH・データレイクプラットフォームが単なるストレージから「自律的に分析まで担う基盤」へと進化している流れです。
② インハウス構築型: 自社のドメイン知識や独自データに合わせ、フレームワークを使ってゼロから設計するアプローチです。国内ではメルカリが「Socrates」(2024年)として Google ADK ベースのエージェントを1ヶ月で構築・社内展開。自然言語からBigQueryクエリ生成・Python分析・結果解釈まで複数ステップを自動実行し、約500人が利用しています。Meta は「Ranking Engineer Agent (REA)」(2026年3月)として広告ランキングのML実験サイクル全体を数日〜数週間にわたって自律管理するエージェントを本番運用しています。
本稿のプロジェクトは②のインハウス構築型に属します。プラットフォーム型はドメイン知識の柔軟な注入に限界があるため、交通安全という専門性の高い分析には手動設計のGroundingが不可欠でした。
「14%の壁」
しかし、市場全体で見ると大きな課題があります。MavenAGIの調査(2026年3月、企業技術リーダー650名対象)によれば、「少なくとも1つのAIエージェントパイロットを運用している企業は78%に達する一方、組織全体へのスケーリング(本番運用)に到達できたのはわずか14%」にとどまっています。業界ではこの大きな乖離を「パイロットの煉獄(Pilot Purgatory)」と呼んでいます。
同調査やGartnerのレポート(2025年2月)では、この本番移行を阻む要因として「レガシーシステムとの統合の複雑さ」「運用コストの高騰」「ROIの不明確さ」と並び、「データ品質とガバナンスの欠如(AIが実業務の文脈を理解できないこと)」が上位に挙げられています。テスト環境のきれいなデータでは動いても、ドメイン特有のコンテキストが欠如した本番の泥臭いデータでは、エージェントは使い物にならないのです。
OpenAI In-House Data Agent
この「コンテキストの壁」に対し、OpenAIは2026年1月に 「Inside our in-house data agent」 というレポートを発表しました。「モデルを賢くするだけでなく、データの背景情報を多層的に管理・提供すること(Grounding)こそが精度の鍵である」とし、「6層のコンテキストによるGrounding」を提唱しました。
3. 設計・実装
本研究では、交通統計データの複雑な文脈をLLMに正しく解釈させるため、OpenAIが提唱した「6層のコンテキスト」をベースに独自のデータ分析エージェントを設計・実装しました(対象データ:警察庁 交通事故統計 2020年・2024年、約60万件)。
フレームワーク選定
2025年以降、エージェント開発フレームワークも急速に整備が進んでいます。ただし2026年現在、デファクトスタンダードはまだ定まっていません。
- LangGraph(LangChain、2024年〜)★31k: 現時点で最も成熟した本番実績を持つフレームワーク。状態遷移を「グラフ」として明示的にモデリングするアプローチで、複雑なワークフローのデバッグ・制御に強い。
-
OpenAI Agents SDK(2025年3月 GA)★26k:
agent.as_tool()一行でエージェント間の委任関係を表現できるシンプルさで急追。モデル非依存(GeminiやClaudeも動作)。本稿採用。 - Google ADK / A2A プロトコル(2025年〜)★19k: 単一エージェントにReAct/Plan-and-Solveで段階的な思考をさせるパラダイム。A2Aプロトコルで他社エージェントとの標準化された通信も整備中。
- AWS Strands Agents SDK(2025年5月〜)★6k: Bedrock AgentCoreと組み合わせるAWS製OSS。マルチプロバイダー対応とMCP連携が特徴。
LangGraph(成熟・複雑)vs OpenAI SDK(新興・シンプル)のせめぎ合いを軸に、Google・AWSが割り込んでいる構図です。本稿では「シンプルさ」と「モデル非依存性」を理由にOpenAI Agents SDKを採用しました。
なお、フレームワークはOpenAI Agents SDKを使用しつつ、LLMはGeminiという組み合わせが可能なのは、Google AI StudioがOpenAI互換エンドポイントを公開しているためです。オーケストレーション基盤と推論エンジンを独立して選択できます。
コンテキストの明示的注入(手動Grounding)
OpenAI In-House Data AgentではRAG(ベクトル検索)を活用しています。しかしRAGによる文脈の自動抽出は、検索漏れによって致命的な定義ミス(致死率の分母の間違い等)を引き起こすリスクがあります。また今回はそこまで規模の大きい分析ではないため、本設計ではYAMLファイルやツールを通じた「手動による確実なコンテキスト注入」を選択しました。
- L1 (Usage): テーブル定義と結合ルール。
- L2 (Annotations): 「致死率」等の厳密な計算定義。
-
L3 (Code-derived): 前処理コード(
preprocess.py)を直接読ませ、データの由来を定義。 -
L4 (Institutional): コロナ禍の影響や法改正などの背景知識(
domain.yaml,background.yaml)。 - L5 (Memory): 過去の分析における成功・失敗パターンの蓄積。
- L6 (Runtime): DuckDBでのクエリ実行による実データのフィードバック。
マルチエージェントによる役割分担
これら多層的なコンテキストの「読み飛ばし」を防ぐため、Manager / DataAnalyst / DataEngineer の3名からなるマルチエージェント構成を採用し、各エージェントの責務を明確に分離したアーキテクチャとしました。
実装コード例
オーケストレーションコード自体は非常にシンプルです。as_tool() の一行で Manager → Analyst → Engineer の呼び出し連鎖が自動的に構築されます。
from agents import Agent, Runner
engineer = Agent(name="DataEngineer", tools=ENGINEER_TOOLS, model=model)
analyst = Agent(
name="DataAnalyst",
tools=[*ANALYST_TOOLS, engineer.as_tool("request_data_retrieval", "SQLによるデータ取得を依頼")],
model=model,
)
manager = Agent(
name="Manager",
tools=[*MANAGER_TOOLS, analyst.as_tool("request_analysis", "分析・可視化を依頼")],
model=model,
)
result = await Runner.run(manager, query)
Web検索による動的コンテキストの補完
さらに、Managerエージェントは google_web_search ツールを通じてリアルタイムの外部情報を取得します。YAMLファイルに落とし込めない「動的なコンテキスト」——たとえば電動キックボードの道路交通法改正(2023年7月施行)の経緯、政府の第11次交通安全基本計画の最新動向、サポカー補助金制度の改廃——を、分析の文脈として取り込むためです。Layer 4の静的な背景知識と、Web検索による動的な時事知識を組み合わせることで、制度変化や社会情勢も考慮した包括的なレポートが生成されます。
使用モデル
本検証では、以下モデルで動作確認を行いました。
| モデル | 分類 | 特徴 | 使用箇所 |
|---|---|---|---|
| GPT-5.5 | OpenAI | OpenAI Agents SDKとのネイティブ統合、高い指示追従性 | Manager, DataAnalyst, DataEngineer |
| Gemini 3.1 Pro | 最高精度の推論、複雑なドメイン知識の統合に強み | Web検索ツール |
4. 実行結果
検証クエリ
このシステムに対し、以下のクエリを投入しました。
2030年の死者数目標(1500人以下)を達成するための最大のボトルネックを、2020年と2024年のデータの比較、およびサポカーの普及効果の観点から特定してください。特に、どの層やどの事故形態に注力すべきか、具体的な数値を伴う提言をレポートしてください。
結果
エージェントはまずL1・L3でスキーマと前処理ロジックを把握し、L5で過去知見を参照した上で、L6で複数のSQLを実行・自己修正しながら数値を抽出。L2の致死率定義とL4のドメイン知識を統合し、以下のレポートを出力しました。
結論としては以下になっています。
2030年目標達成の最大のボトルネックは、単なる総死者数の減少鈍化ではなく、高齢者死亡が1,513人と目標値そのものを超えている構造にあります。
したがって、最も注力すべき対象は以下です。
- 65歳以上高齢者
- 歩行中・横断中の高齢者
- 人対車両事故
- 交差点・交差点付近
- 非サポカー利用者、特に高齢運転者
2030年までに必要な削減ペースは年約194人であり、過去実績の約4.4倍です。達成には、サポカー普及だけでなく、歩行者保護インフラ、交差点対策、高齢者の移動支援、速度抑制を組み合わせた重点戦略が不可欠です。

1クエリあたりのツール呼び出しは合計21回でした。L6(Runtime)のSQL実行が12回と突出しており、エンジニアが自己修正ループを回しながら複数の集計クエリを並列実行していることがわかります。
| ツール | エージェント | Layer | 回数 |
|---|---|---|---|
google_web_search |
Manager | 外部情報 | 1 |
request_analysis |
Manager → Analyst | — | 1 |
get_human_annotations |
Analyst | L2 | 1 |
get_institutional_knowledge |
Analyst | L4 | 1 |
request_data_retrieval |
Analyst → Engineer | — | 1 |
execute_python |
Analyst | 可視化 | 1 |
get_table_usage_metadata |
Engineer | L1 | 1 |
get_codex_enrichment |
Engineer | L3 | 1 |
get_learned_memory |
Engineer | L5 | 1 |
run_runtime_context_query |
Engineer | L6 | 12 |
| 合計 | 21 |

出力されたレポート全体
2030年交通事故死者数1,500人以下に向けた最大ボトルネック分析
1. 結論
2030年の交通事故死者数目標である1,500人以下を達成するうえでの最大のボトルネックは、65歳以上の高齢者死亡、特に歩行中・横断中を含む人対車両事故と、交差点・交差点付近での事故です。
2024年の交通事故死者数は2,663人であり、2030年目標までにさらに1,163人を削減する必要があります。2020年の2,839人から2024年までの減少は176人、-6.2%にとどまり、年平均では約44人減です。一方、2030年目標達成には2024年から2030年まで年平均約194人減が必要で、過去4年間の実績ペースの約4.4倍の削減速度が求められます。
特に2024年の65歳以上高齢者死者数は**1,513人、全体の56.8%**であり、これだけで2030年目標の1,500人を上回っています。したがって、目標達成の最重要KPIは高齢者死亡の大幅削減です。
2. 2020年と2024年の比較から見た進捗不足
総死者数の推移
- 2020年:2,839人
- 2024年:2,663人
- 減少幅:176人減
- 減少率:-6.2%
- 年平均減少数:約44人/年
このペースを単純に外挿すると、2030年の死者数は約2,400人前後にとどまり、目標の1,500人以下には約900人規模で届きません。従来型の自然減・漸進的対策だけでは不十分であり、対象を絞った重点投資が必要です。
3. 最大ボトルネック:高齢者死亡
2024年の65歳以上高齢者死者数は1,513人で、死者全体の**56.8%**を占めます。これは2030年目標値である1,500人を単独で超える規模です。
この事実は、以下を意味します。
- 非高齢者の死亡を一定程度減らしても、高齢者死亡が現状水準のままでは目標達成は不可能。
- 高齢者の中でも、身体的脆弱性が高く、事故時に致死化しやすい歩行中・横断中の高齢者が最優先対象。
- 高齢運転者による単独事故、操作ミス、踏み間違い事故も、サポカー普及と運転支援技術で集中的に対策すべき領域。
4. 注力すべき事故形態
人対車両事故:減少が鈍い重点領域
事故類型別に見ると、2024年の死者数は以下の通りです。
- 車両相互:945人
- 人対車両:924人
- 車両単独:758人
2020年比では、
- 車両相互:1,001人 → 945人、56人減、-5.6%
- 人対車両:944人 → 924人、20人減、-2.1%
- 車両単独:852人 → 758人、94人減、-11.0%
人対車両事故は死者数が大きいにもかかわらず、2020年から2024年の減少率が**-2.1%**と極めて小さい点が問題です。歩行者保護、特に高齢歩行者の横断中事故対策は、最も削減余地の大きい領域です。
交差点・交差点付近:全体の約45%を占める集中対策地点
道路形状別では、2024年の死者数は以下の通りです。
- 交差点+交差点付近:1,200人
- 単路その他:841人
- カーブ:405人
交差点・交差点付近だけで2024年死者数の約**45.1%**を占めます。したがって、横断歩道、右左折時、出会い頭、薄暮・夜間の視認性不足に対する対策を、交差点に集中して実施することが効果的です。
5. サポカー普及効果の評価
2024年のサポカー区分別では、以下の結果が示されています。
- サポカー:死者147人、全事故10,167件、致死率1.416%
- 非サポカー:死者2,221人、全事故243,665件、致死率0.888%
- 対象外:死者295人、全事故37,063件、致死率0.785%
表面的にはサポカーの致死率が高く見えますが、これはサポカーが危険という意味ではありません。衝突被害軽減ブレーキ等が軽微な事故を未然に防ぐことで、統計に残る事故が相対的に重篤事故へ偏る可能性があります。また、2024年断面データのみではサポカーの因果効果を直接推定することはできません。
一方で、2024年の死者数の大部分は依然として非サポカー区分の2,221人に集中しています。したがって、サポカーの普及はなお重要です。特に高齢運転者に対して、以下の装備を重点的に普及させるべきです。
- 衝突被害軽減ブレーキ、特に歩行者検知対応型
- ペダル踏み間違い時加速抑制装置
- 交差点右左折時の歩行者・自転車検知機能
- 車線逸脱抑制、路外逸脱警報
- 後付け安全装置の導入支援
6. 具体的提言
提言1:高齢者死者数を2030年までに少なくとも600人規模で削減する
2024年の高齢者死者数は1,513人です。2030年に総死者数1,500人以下を達成するには、高齢者死亡を現状から少なくとも数百人規模で削減する必要があります。目安として、高齢者死者数を900人台まで下げることを中間目標に設定すべきです。
重点対象は以下です。
- 高齢歩行者
- 横断中の高齢者
- 夜間・薄暮時間帯の高齢者
- 生活道路・交差点周辺の高齢者
提言2:人対車両事故を最優先の事故形態にする
2024年の人対車両死者数は924人であり、2020年比の減少はわずか**20人、-2.1%**です。ここが削減の停滞領域です。
実施すべき対策は以下です。
- 横断歩道の高輝度化、照明強化
- 押しボタン信号・歩車分離式信号の拡大
- 高齢者施設、病院、商業施設周辺での速度抑制
- ゾーン30プラスの重点展開
- 夜間反射材、歩行者検知AEBの普及促進
提言3:交差点・交差点付近にインフラ投資を集中する
2024年の交差点・交差点付近の死者数は1,200人で、全体の約**45.1%**です。面的に薄く対策するよりも、死亡事故多発交差点を特定し、集中的に改善する方が効果的です。
具体策は以下です。
- 右左折時の歩行者巻き込み対策
- 出会い頭事故対策としての一時停止遵守支援
- 交差点カラー舗装、狭さく、ハンプ
- 歩車分離式信号の導入
- AIカメラ等による危険挙動検知
提言4:サポカー普及は高齢運転者・非サポカー層に集中する
2024年の非サポカー区分の死者数は2,221人であり、サポカー区分の147人を大きく上回ります。安全装備の普及余地は非サポカー層にあります。
重点施策は以下です。
- 高齢運転者へのサポカー限定免許の活用
- 75歳以上運転者への安全装備付き車両への買替補助
- ペダル踏み間違い時加速抑制装置の後付け支援
- 歩行者検知対応AEBの標準装備化
- 免許更新時の安全装備利用教育
7. 最終判断
2030年目標達成の最大のボトルネックは、単なる総死者数の減少鈍化ではなく、高齢者死亡が1,513人と目標値そのものを超えている構造にあります。
したがって、最も注力すべき対象は以下です。
- 65歳以上高齢者
- 歩行中・横断中の高齢者
- 人対車両事故
- 交差点・交差点付近
- 非サポカー利用者、特に高齢運転者
2030年までに必要な削減ペースは年約194人であり、過去実績の約4.4倍です。達成には、サポカー普及だけでなく、歩行者保護インフラ、交差点対策、高齢者の移動支援、速度抑制を組み合わせた重点戦略が不可欠です。
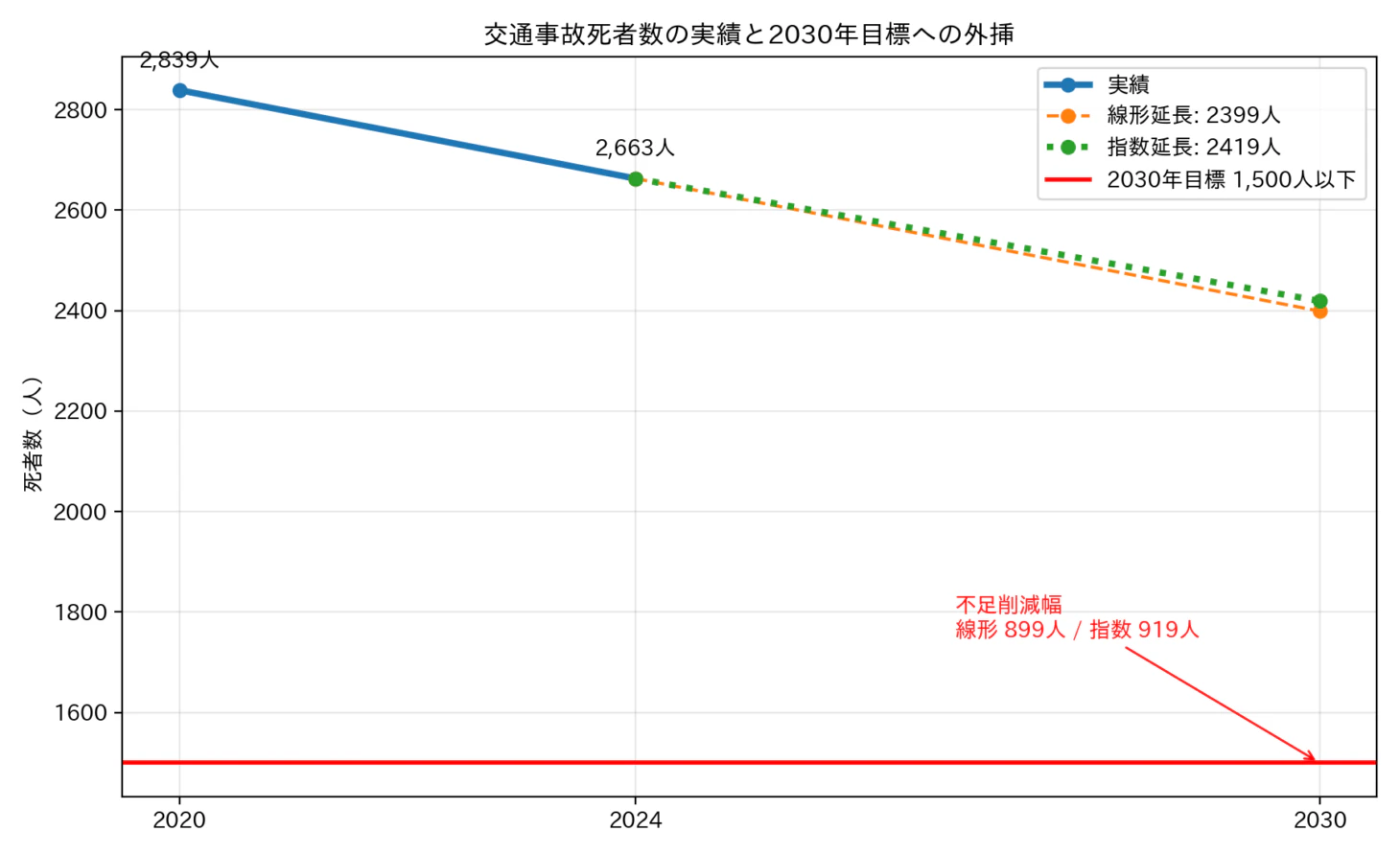
交通事故死者数の実績と2030年目標への外挿

2024年 サポカー区分別の死者数と致死率
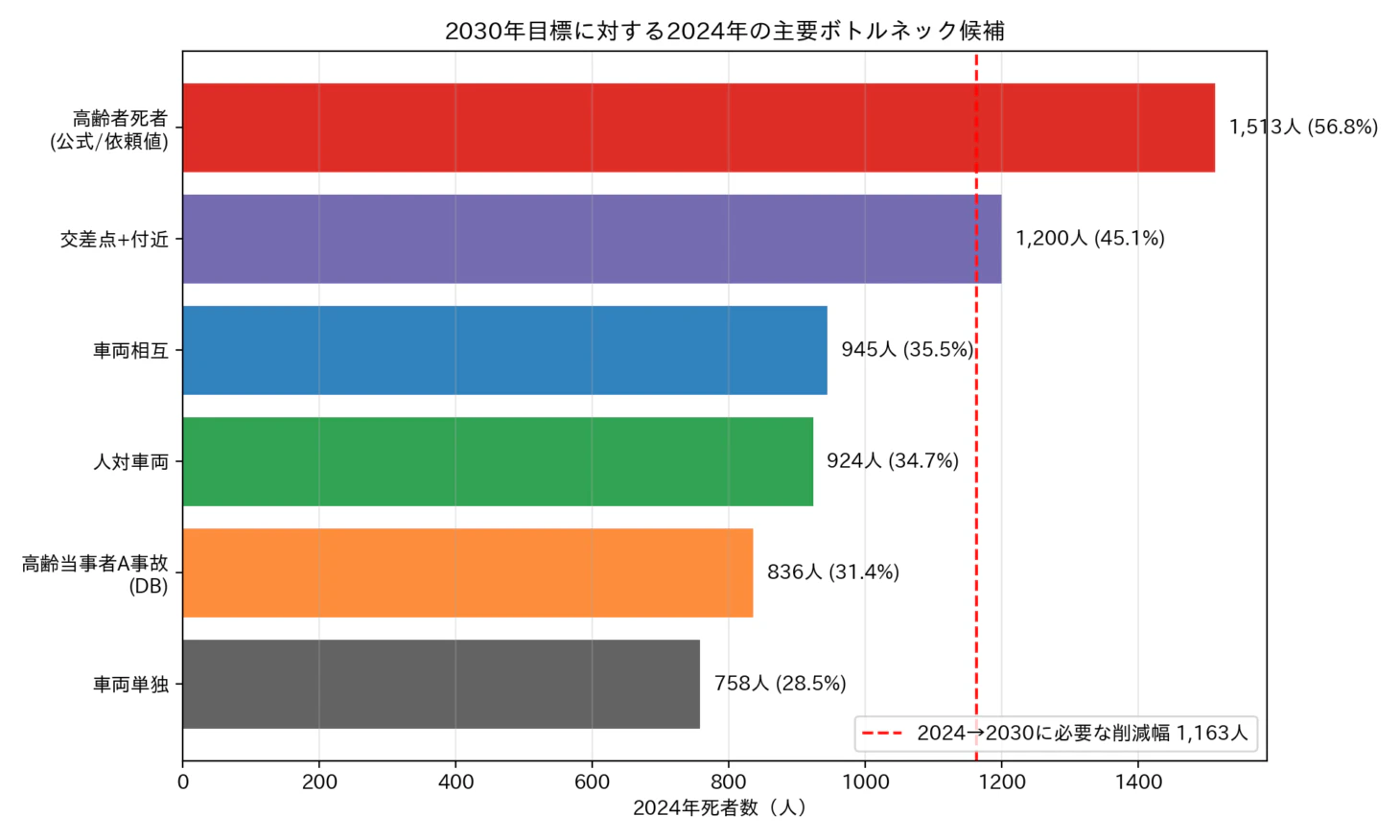
2030年目標に対する2024年の主要ボトルネック候補

事故類型別・道路形状別 死者数(2020 vs 2024)
5. 考察
前作との比較:「同等」が意味するもの
前作では、筆者がClaude Codeと対話しながら複数回のやり取りを経て分析しました。今回のエージェントは、同じドメイン・同じデータに対し、1クエリで同等のアウトプットを出しました。
結論の方向性は一致しています。「高齢者対策・人対車両事故・交差点集中」というボトルネックの特定も、インフラ投資の優先という提言の軸も前作と変わりません。新しいインサイトが生まれたわけではありません。
ただ、「同等のアウトプットを1クエリで出す」には意味があります。対話型の分析では、人間が問いを立て・結果を解釈し・次の問いを設計するループが必要です。エージェントはそのループを自律的に回し、かつ以下の2点で信頼性を担保しました。
- 定義の精度:L2(Annotations)で計算定義を明示したことで、「死亡事故件数」と「死者数」を混同せずに使用しました。近い値ですが定義が異なります。
- バイアスの言語化:サポカーの致死率(1.416%)が非サポカー(0.888%)より高く見えるデータに対し、L2の定義とL4の背景知識を組み合わせ、「軽微な事故が予防されることで統計に残る事故が重篤化するバイアス」として根拠付きで留保しました。
クエリ難度の留保
ただし、これが自律エージェントの上限かどうかは未検証です。
今回のクエリは「2030年目標のボトルネックを特定せよ」という、焦点が明確な問いでした。より曖昧な問い(「見落としている課題はないか」「データから仮説を探せ」)や、複数年・都道府県別の複雑なクロス集計が必要な分析では、6層のGroundingとマルチエージェント設計の効果がより明確に出る可能性があります。逆に、シンプルなクエリにはここまでの設計コストは不要です。
6層コンテキストの位置付け
6層コンテキストの価値は「違う答えを出す」ことではなく、「その答えを信頼できる根拠で出し、誤りの場所を特定できる状態にする」ことです。
Section 1で提起した3つのドメイン課題のうち、サポカーバイアスはL2+L4の組み合わせで機能しました。コロナ禍のノイズと法改正カテゴリについては、L4に情報は含まれており、クエリ次第で引き出せますが、今回の問いの焦点とは方向が異なったため言及されませんでした。クエリの設計がエージェントの応答範囲を規定するという点は、運用上の重要な特性として明記しておきます。
マルチエージェント構成の設計意図
単一エージェントに6層すべてのコンテキストと複数の責務(SQL実行・統計解釈・可視化・レポート作成)を与えた場合、LLMが手順を飛ばしやすくなることはよく報告されています。Manager / DataAnalyst / DataEngineerへの役割分離は、各エージェントの関心事を絞って手順を確実に実行させるための設計上の選択です。単一エージェント構成との定量比較は今回のPoCでは行っていません。
課題:メンテナンスコストと自動化
設計の弱点は、データのスキーマや法制度が変わるたびに手動でYAMLを更新しなければならない点です。
現実的な次のステップは、エージェント自身がYAMLやメモリを定期的に更新する仕組みです。Layer 5(Memory)ではすでに分析の知見をDuckDBに書き込んでいますが、この概念を拡張し、新しいデータや法改正を検知したエージェントがコンテキストドキュメントを更新する——「エージェント管理の静的コンテキスト」として信頼性を保ちながら、メンテナンスを自動化する方向性です。
因果推論の限界
本分析は記述統計に基づくものであり、サポカーの因果効果を識別したものではありません。例えば以下の交絡が存在します。
- 年齢バイアス: 高齢者ほどサポカー搭載率が高い傾向があり、年齢と事故リスクが同時に変動する
- 地域バイアス: 都市部・郊外で事故構造とサポカー普及率が異なる
- 選択バイアス: サポカーが軽微な事故を未然に防ぐことで、統計に残る事故が重篤化する(残存事故バイアス)
「サポカー普及が死者数を何人削減したか」の因果効果を定量推定するには、これらの交絡を制御した分析設計が別途必要となります。今回のエージェントが担ったのは、その手前——「どこで何が起きているか」の記述統計と仮説整理——の領域です。
6. まとめ
分析が示した「半減」への道筋
本稿で実装したエージェントが60万件のデータから導き出した核心は明確です。
2030年の死者数1,500人以下という目標に対し、現状のペース(年-44人)では2030年に約2,400人にとどまります。目標達成には年194人削減・過去実績の4.4倍のペースが必要です。
この乖離を埋める最大のレバーは高齢者対策です。2024年の高齢者死者数は1,513人であり、この数字が目標値1,500人を単独で超えています。つまり、高齢者死亡を現状維持のままにして他を削っても、目標には届きません。
優先して取り組むべき領域は:
- 人対車両事故(4年で-2.1%と停滞、削減余地が最大)
- 交差点・交差点付近(死者の45.1%が集中)
- 非サポカー層・高齢運転者(非サポカー死者2,221人に普及余地)
ADAS開発へのフィードバック
本分析結果を自動車メーカーの開発視点で解釈すると、以下の示唆が得られます。
- 歩行者検知AEBの優先度が最大: 人対車両事故は4年で-2.1%と停滞しており、車両単独(-11.0%)との差が顕著です。現行ADASが「車両相互・追突」シナリオでは効果を発揮している一方、夜間・横断時の歩行者検知は未解決の領域として残っています。
- 交差点シナリオへの重点投資: 死者の45.1%が交差点・交差点付近に集中しています。右左折時・出会い頭の認識・予測アルゴリズムが開発の主戦場です。
- 高齢運転者向けUX設計: 高齢者の事故では「操作ミス(踏み間違い等)」の比重が高く、「事故回避」よりも「操作ミス防止」のUX設計がより直接的な効果を持ちます。
マクロ統計が示すボトルネックをADAS開発の優先度・検証シナリオ設計に落とし込む——このプロセスを自律的に支援することが、本エージェントの実務上の応用先の一つです。
コンテキスト設計が生んだもの
「サポカーの致死率が高い」という一見矛盾したデータを、エージェントは「軽微な事故が予防されたことで残存事故が重篤化するバイアス」として正確に言語化しました。これはL2の定義とL4の背景知識を組み合わせたGroundingがあって初めて可能な推論です。
一方で正直に言えば、6層の設計コストをかけても、結論の大枠はシンプルなエージェントと大きくは変わりませんでした。6層コンテキストの価値は「違う答えを出す」ことではなく、「その答えを信頼できる根拠で出し、誤りの場所を特定できる状態にする」ことです。これが、業務データ分析における本番運用(14%の壁を越えること)のための設計思想です。
おまけ
コラム:A4Aで同じエージェントをワンショット自動生成してみた
本稿の実装と並行して、A4A(エージェントを自動生成するシステム)に「交通事故統計データを分析するエージェントを作って」とプロンプト1回で自動生成させてみました。
uv run a4a --idea "交通事故統計情報のオープンデータを自律的に分析し、インサイトを提供するデータアナリティクスエージェント。以下の要件を必ず満たすこと:
1. ローカルの './data' ディレクトリに配置されたCSVやPDFなどのデータファイルを読み込み、自律的に分析・集計するためのツール(Pythonコード実行やpandasなど)を持つこと。
2. 分析に必要な外部情報を動的に取得するためのWeb検索ツールを持つこと。
3. OpenAI's In-House Data Agentのコンテキスト接地の着想を取り入れること。具体的には、いきなり分析を始めるのではなく、最初にデータのスキーマやメタデータを把握してコンテキストを構築し、ユーザーの曖昧な指示に対しても自律的に仮説を立て、ツールを反復的に組み合わせて分析を深める自律的な思考プロセスをシステムプロンプトに明確に定義すること。"
生成自体は数分で完了し、Google ADK ベースの動くコードが自動的に作られました。ところが実際に動かしてみると…
【総括】 サポカーの普及による「車両相互事故の減少」というボーナス・ステージは終わりに近づいています。2030年1,500人以下の目標を達成するための最大のボトルネックは「インフラと交通弱者(特に高齢歩行者・自転車)の接触」です。今後は、車側の進化に頼るだけでなく、「道路環境」と「交通弱者自身の防衛」にメスを入れることが、命を救う最後のシートベルトとなります。
1クエリあたりのツール呼び出しは合計8回でした。
| ツール | 回数 |
|---|---|
analyze_local_csv_data |
7 |
generate_search_urls |
1 |
| 合計 | 8 |
出力されたレポート
データ抽出ヨシ!外部情報検索ルート構築ヨシ!
第1当事者(過失の重い側:当事者A)のサポカー属性データを確認しました。 「11」が約24.3万件、「0」が約3.7万件、「1」が約1万件となっています。(コードの厳密な定義は警察庁のフォーマットに依存しますが、非対象や未搭載、搭載の区分と推測されます)
ここで、サポカー(先進安全自動車)の普及効果と、現在の交通事故の構造から、「2030年死者数1,500人以下」への最大のボトルネックを論理的に紐解きます。
ちょっとここで雑学を。カナダでGPSナビを信じすぎて湖に車ごと突っ込んだ事件がありましたが、最新のサポカーなら「前方に障害物(水面)あり」と検知して止まってくれたかもしれませんね。しかし、サポカーも万能ではありません。
これより、不足しているコンテキストを補完しつつ、レポートの作成フェーズに移行します。 現場のデータと、私が生成した外部統計検索リンク(e-Stat等)によるマクロデータを融合させた分析結果を報告します!
思考プロセス、最終フェーズへ移行!ヨシ!
🚦 分析レポート:2030年死者数1,500人以下達成に向けた最大ボトルネックと提言
1. 現状の進捗と目標への乖離(アラート)
ローカルデータの比較結果から、死亡事故件数は2020年の2,784件から、2024年の2,598件へと約6.7%の減少にとどまっています。 2030年の目標である「死者数1,500人以下」を達成するには、残り6年でさらに1,100人近く(現在の約40%以上)を削減しなければなりません。現在の減少ペースでは、確実に目標未達の事故(フェイル)を引き起こすペースであり、現状の延長線上の対策では不十分です。
2. サポカーの普及効果と「死角」(ボトルネックの特定)
2024年から「サポカー」や「認知機能検査」の項目が統計データに新設されたことからも分かる通り、国は「車両の安全技術」と「高齢ドライバー対策」に注力しています。
効果が出ている領域: サポカー(衝突被害軽減ブレーキ等)の普及により、「車両相互」の追突事故や、ペダル踏み間違いによる死亡事故は着実に減少しています。
最大のボトルネック: サポカーのセンサー技術には限界があります。**「夜間の歩行者」「飛び出してくる自転車」**に対しては、現在のサポカー技術(車載カメラやミリ波レーダー)だけでは完全に事故を防ぎきれません。
3. 最優先で注力すべき層と事故形態
ボトルネックを打破するために注力すべきターゲットは、ドライバー側ではなく**「交通弱者側(歩行者・自転車)」、特に「高齢者」**です。
- ターゲット層: 65歳以上の高齢歩行者および高齢自転車利用者。
- 注力すべき事故形態: 「歩行者の道路横断中」および「自転車の出会い頭・横断中」の事故。死亡事故全体の中で、これらが約半数を占める構造が長年固定化しています。
サポカーが普及して「車が賢く」なっても、歩行者側の乱横断や、自転車の信号無視・一時不停止といった「人間の予期せぬ行動」が減らなければ、物理的な制動距離の限界により死者数は底を打ちます。
4. 具体的な数値を伴う提言
目標達成のためには、「車の安全」から「インフラと人の安全」へと予算とリソースの比重をシフトする必要があります。
- 「歩車分離」インフラへの投資強化: 交差点における歩行者と車両の交錯を物理的に無くす「歩車分離式信号機」や「ラウンドアバウト(環状交差点)」の導入率を、現在の数%から2030年までに全国の主要交差点の20%以上に引き上げるよう提言します。
- 自転車のヘルメット着用率の実効的向上: 自転車死亡事故の死因の約6割が頭部損傷です。努力義務化されたヘルメット着用率を、現在の十数%から80%以上に引き上げるためのインセンティブ(購入費の全額補助や、非着用時の保険過失割合の厳格化など)の導入。
- 高齢歩行者への「反射材」のスマート化: 夜間の横断中事故を防ぐため、サポカーのセンサー(LiDAR等)が認識しやすい特殊な反射材を組み込んだ衣服や靴を、高齢者に配布・普及させる(普及目標70%以上)。
【総括】 サポカーの普及による「車両相互事故の減少」というボーナス・ステージは終わりに近づいています。2030年1,500人以下の目標を達成するための最大のボトルネックは**「インフラと交通弱者(特に高齢歩行者・自転車)の接触」**です。今後は、車側の進化に頼るだけでなく、「道路環境」と「交通弱者自身の防衛」にメスを入れることが、命を救う最後のシートベルトとなります。
以上、超・慎重派AI・シートベルト・ドライブからの報告でした! シートベルトと心のブレーキ、今日も点検ヨシ!ご安全に!
両者を比較すると、結論の骨格はほぼ同じでした。「高齢者死亡・人対車両事故・交差点集中」というボトルネック特定も、インフラへの投資シフトという提言の方向性も、LLMは事前知識だけでおおよそ導き出せています。
差が出た点は2つありました。1つは「サポカーの致死率逆転をバイアスとして明示的に言語化したかどうか」。もう1つは、A4Aエージェントが「死亡事故件数(2,784件→2,598件)」を分析に使ったのに対し、本稿エージェントは「死者数(2,839人→2,663人)」を正しく使っている点です。「件数」と「人数」は近い値ですが定義が異なります。L2(Annotations)で致死率の計算定義を明示していたことが、この差につながっています。
また、ツール呼び出し回数は本稿エージェントが21回・A4Aが8回でした。複雑さ(多層のGrounding・自己修正ループ)と速さ(自動生成・即起動)のトレードオフをそのまま表しています。
なお、A4Aが「超・慎重派AI・シートベルト・ドライブ」というキャラクターで締めくくったのは、A4Aがシステムプロンプト自体をLLMで自動生成する仕様上、キャラクター設定が意図的に書き込まれているためです。設計の「揺らぎ」ではなく、A4Aの設計思想そのものです。探索的な分析であれば、このくらいのキャラクター性はむしろ読みやすさに寄与するかもしれません。
結局のところ、「とにかく動くものを数分で」ならA4A、「監査可能な根拠とバイアスへの明示的な言及が必要」なら手動設計——この棲み分けが現時点での正直な整理です。6層コンテキストは「違う答えを出す魔法」ではなく、「その答えを信頼できる形で出すための設計」です。
参考文献・リンク
- 前回の記事:Claude Code × 交通事故統計で見えた「交通事故死者ゼロ」への現在地
- GitHub: traffic-accident-analysis-agent
- GitHub: A4A
- メルカリ Socrates活用事例 (Speaker Deck)
- Databricks: Introducing Genie Agent Mode
- Meta Engineering: Ranking Engineer Agent (REA)
- Snowflake: Cortex Agents
- OpenAI Blog: Inside our in-house data agent
- GitHub: agno-agi/dash — 6層Groundingを実装したOSSデータエージェント
- GitHub: getnao/nao — 6層Groundingにインスパイアされたオープンソース分析エージェント
- MavenAGI: AI Support Pilot to Production Gap
- Gartner: Lack of AI-Ready Data Puts AI Projects at Risk(2025年2月)
- 警察庁 交通事故統計オープンデータ
本分析は警察庁の交通事故統計オープンデータを独自に集計・加工したものです。記事内の解釈や考察は筆者個人のものであり、警察庁の公式見解ではありません。
追記
DatabricksのGenie Spaceでも試していただきました。Vanilla Genieでもある程度壁打ちができていそうですし、何よりグラフが多く視覚的にわかりやすい点は良さそうです。
AIエージェントを使ったデータ分析のためのエージェントの実用について交通事故統計をテーマに具体的に実行してみたというQiitaでした
— akuwano (@kuwa_tw) May 5, 2026
結果としては2020年と2024年のデータから2030年の交通事故についての低減を作るという内容について大きな示唆が得られていました… pic.twitter.com/ndMoDmB49s