はじめに
前回投稿した記事の続きです。
ESP-WROOM-02でスマートロックを作ろう
前回の課題
サーボモーターの回転軸とサムターンを回す回転軸が完全に同期してしまっているので、通常の鍵(物理鍵)を使って開けることができない。
もしロックした状態で外出し、停電になってしまったら
物理鍵で開けることができない!!!!
こんな仕様になってしまったので電子的な方法以外にも解錠・施錠の方法を用意しようと思います。
検討
「Qrio Lock」や「SESAME」などの市販のスマートロックは普通の物理鍵でも開けられる仕様になっているらしいが、どのような仕組みになっているかは詳細に公開されていない。
この仕組みを知るために新品を購入して分解するのは本末転倒なので、分解記事を探してみた。
「NinjaLock」を分解した勇者のレポートによるとこういう仕組みらしい。
[スマートロック、NinjaLockの分解レポート「なぜ手動でも機械でも鍵の開閉が可能なのか?」]
(https://dreamerdream.hateblo.jp/entry/2019/04/30/170000)
解説にある図解をFusion360で簡単に再現してみた。

画像の内側の回転盤(黄色の部分)がサムターン(緑色の部分)を回した後に元の位置に戻ることによって、物理鍵による回転を妨げない構造になっていた。
これを前回のスマートロックに搭載すれば何とか解決できそうだ。
実装
というわけで新しい回転機構を作ります。
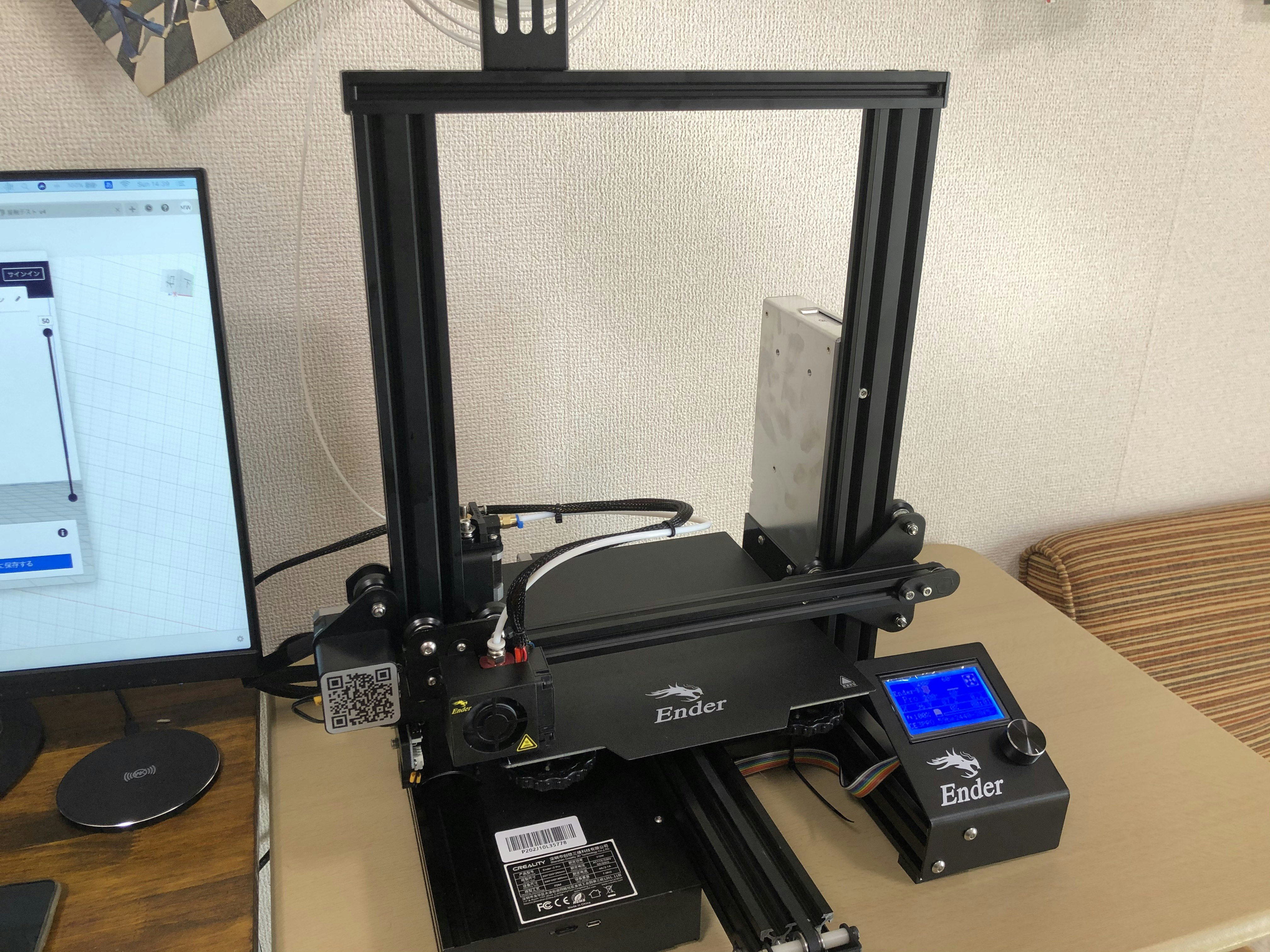
今までの木工では限界があったので、これを機に3Dプリンターを買ってしまいました。
この購入で3万円掛かっているので普通に市販のQrioLockが買えます...
ちなみに買ったのは「Ender3 Pro」というEngadgetでもベストバイに選ばれていた高コスパの3Dプリンターです。失敗もなく高い精度で作れました。
3万円台3Dプリンター「Ender 3 Pro」が案外便利でした | ベストバイ2020
3次元CADで設計したものと実際にプリントされたもの。
バラバラですが、後で瞬間接着剤で接着します。


ついでに以前木工で作ったサムターンを回す部分も3Dプリンターで作ってしまいました。
3Dプリンターが1台でもあると最強ですね。その他のパーツは全て前回の流用です。

また制御部である「ESP-WROOM-02」側も、サムターンを回転したら元に戻るようにソースコードを修正しておきます。
完成
無事に物理鍵で開けられるようになりました。
ようやく締め出しも発生しない健全な運用ができそうです。

一応これで完成ですが、今後も改善は続けようと思います。
将来的にはWiFiの設定も基盤上のLCD画面で行えるところまで作り込むつもりです。