概要
最近AWS robomakerでROS2がサポートが開始されました!バージョンはbetaですが、2020年の後半くらいにbetaが取れるらしいです。今回は、robotmakerの開発環境でros2を選択し、そこでノードの実行をしてみたいと思います。
また、ros1でのAWS RoboMakerは次の記事がとてもよくまとめられていて助かりました。
https://qiita.com/nmatsui/items/6721c820000cf5115bdc
実行手順
今回はros2のチュートリアルとして公開されている"Hello World"を使用してros2のノードを実行してみたいと思います。また、aws robomakerのros2対応のチュートリアルは現在、2つあります。(2019/12/14 現在)他のディストリビューションだと全部で5つあります。今後サポートが続けてられ行くうちに、他のディストリビューションで公開されているチュートリアルもROS2で実行できるようになると思います。
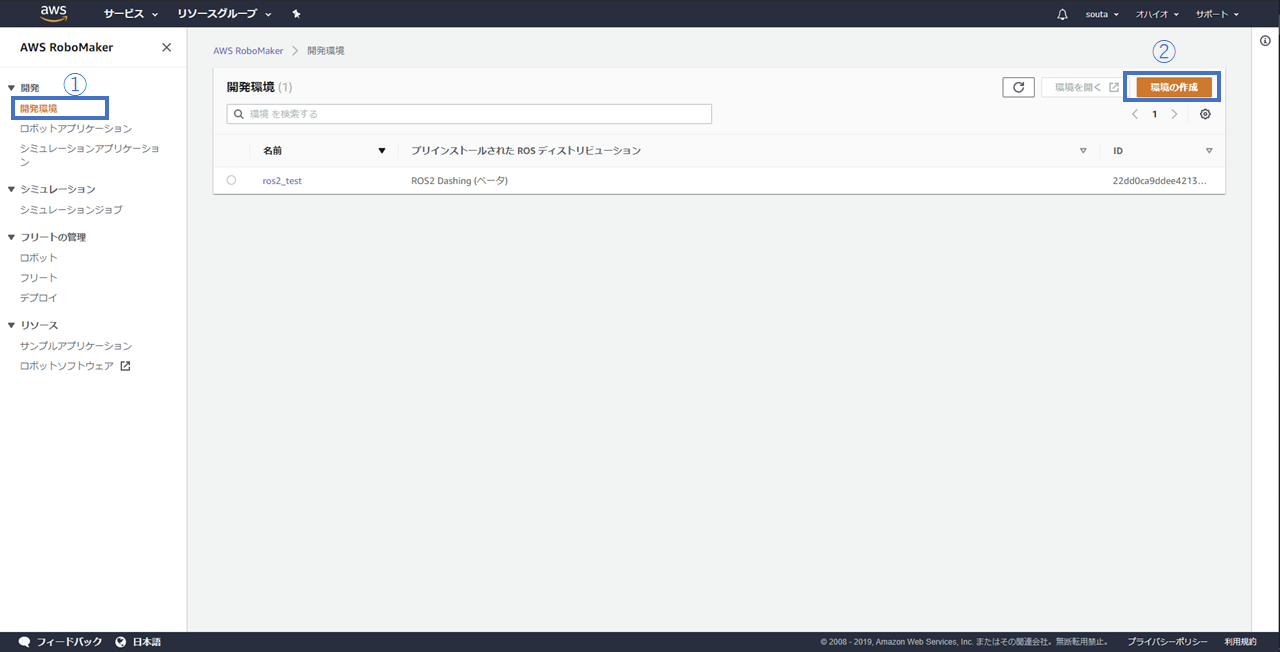
1. AWSコンソールを開き、開発新規->環境の設定を選択する
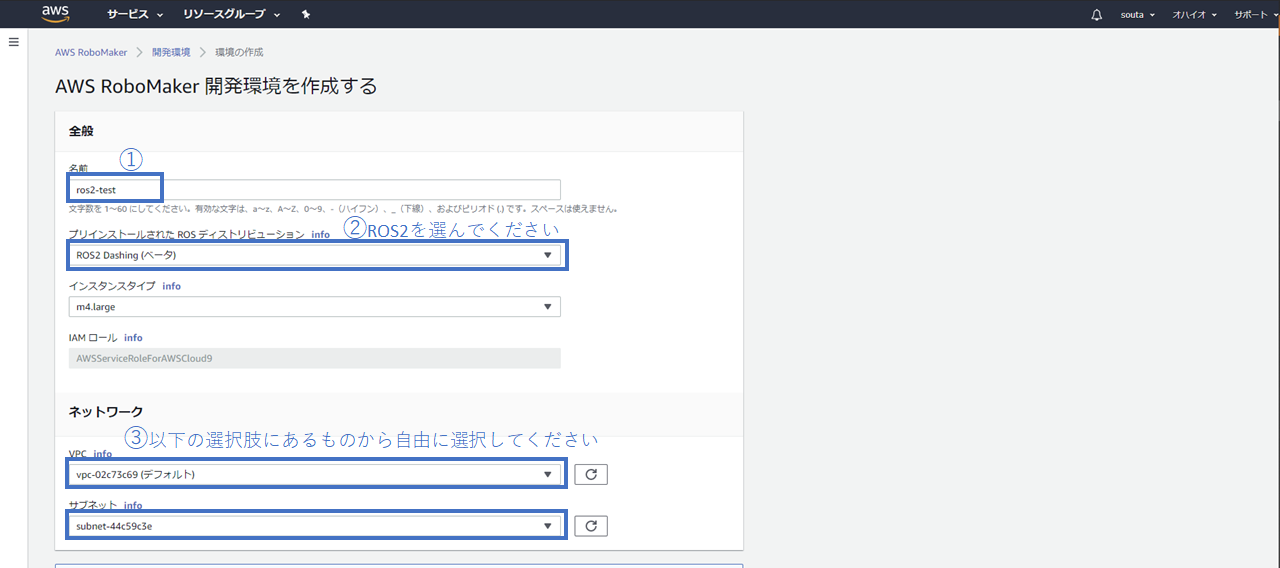
2. ROSディストリビューションをROS2 Dashingに設定する
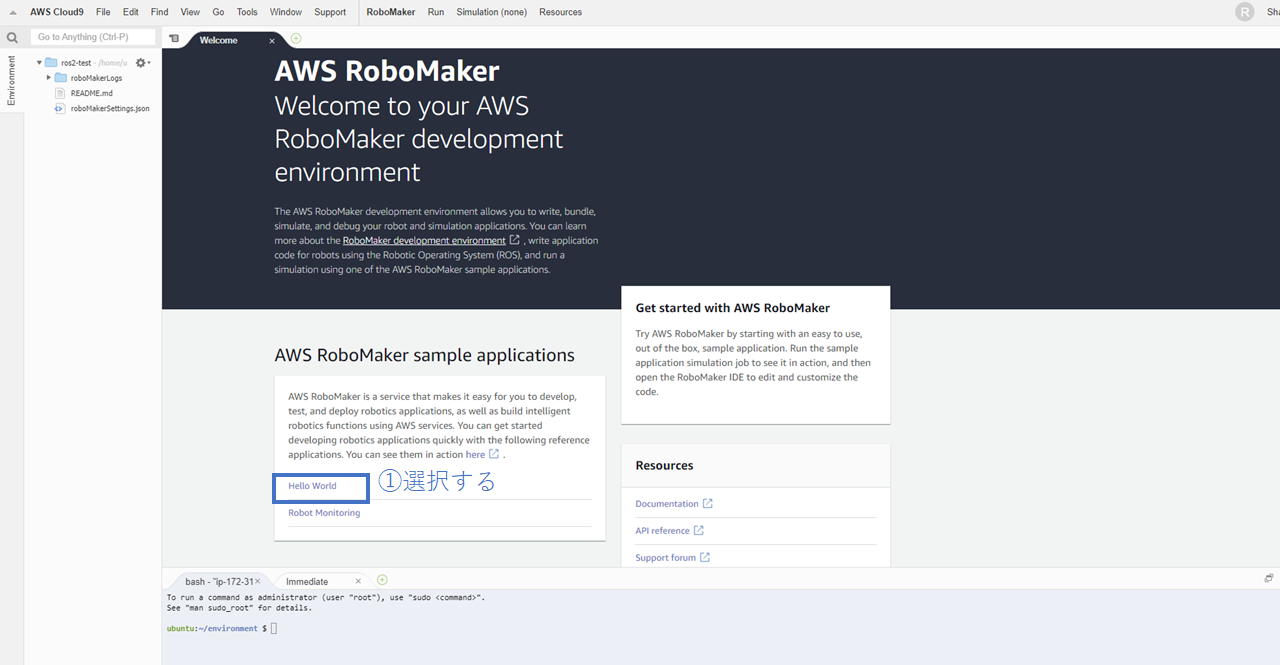
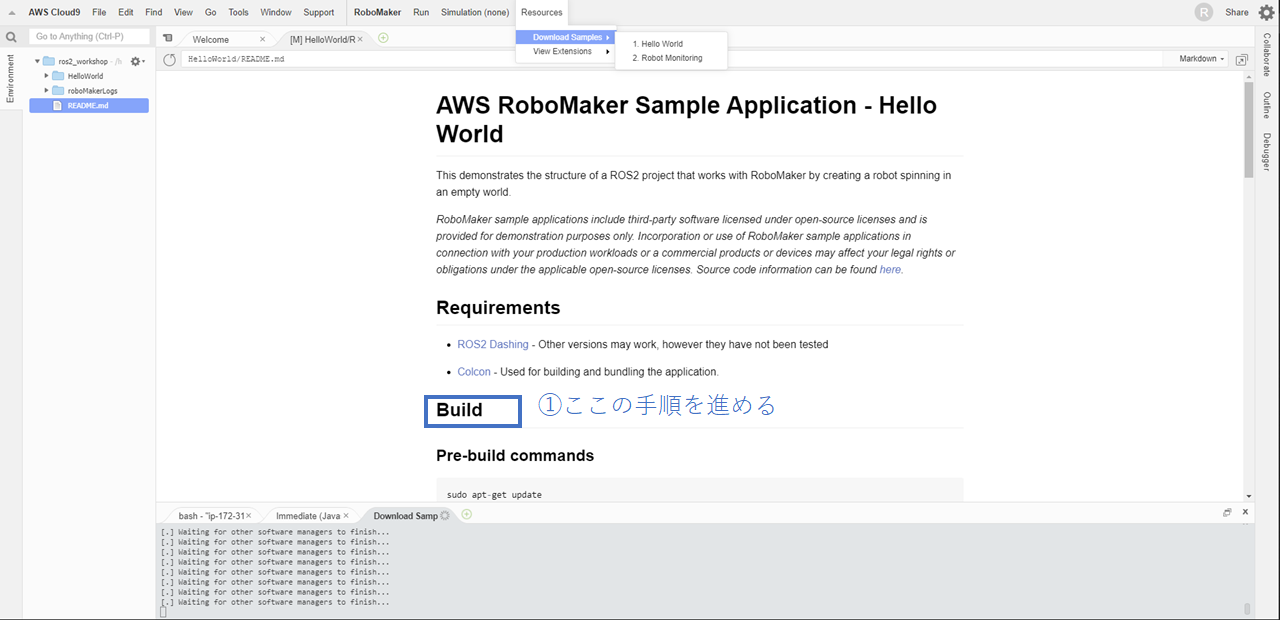
3. Cloud 9が立ち上がったらHello Worldチュートリアルをダウンロードする
ー立ち上がり前
ー立ち上がり後
4. Hello Worldチュートリアルのコンフィグレーションを行う
コンフィギュレーションはCloud9の下部にあるbash shellで行ってください.
内容は以下の通りです。
sudo apt-get update
rosdep update
cd robot_ws
rosws update
rosdep install --from-paths src --ignore-src -r -y
colcon build
Simulation
cd simulation_ws
rosws update
rosdep install --from-paths src --ignore-src -r -y
colcon build
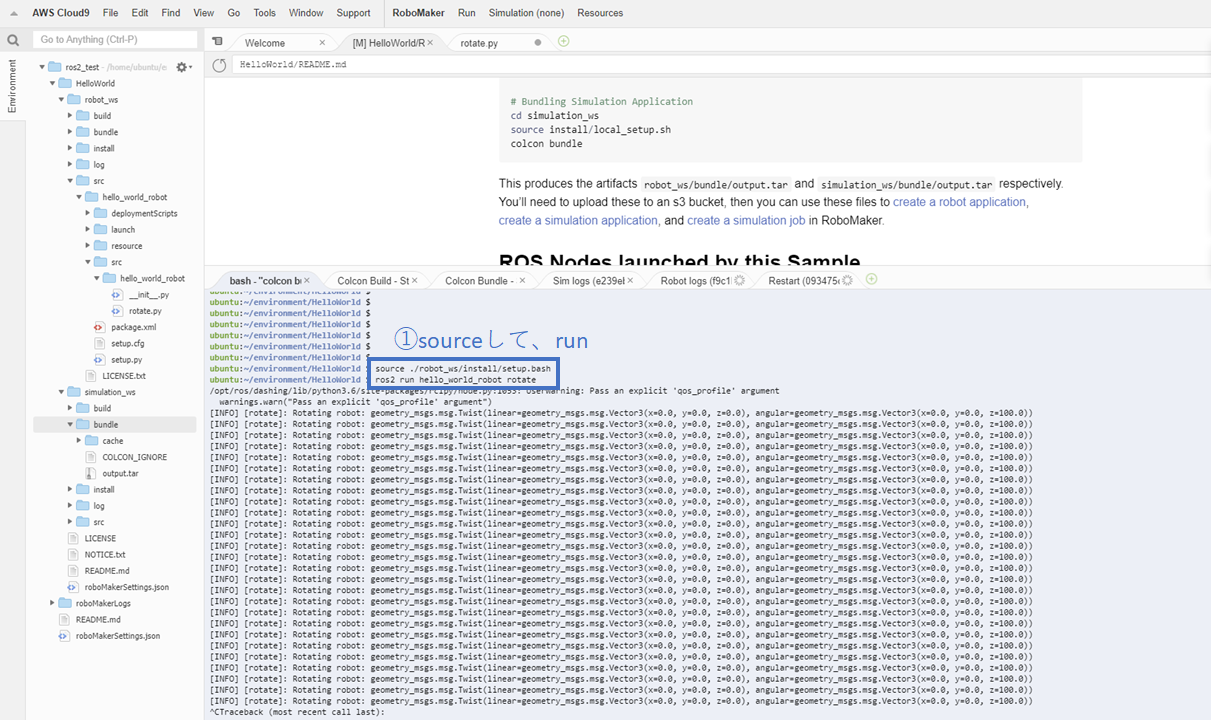
5. /HelloWorld/robot_ws/src/hello_world_robot/srcのrotate.pyを適当に編集する
6. ターミナル(Cloud 9上)で実行する
まとめ
今回は実行環境の構築と確認だけ行いましたが、今後はシミュレーションジョブを追加してgazeboとかを試していきたいと思います。すごく簡単にできるのでawsのアカウントを持っている人はぜひ一度試してみて下さい!