RaspberryPiに接続した温度・気圧・湿度を測定するセンサー(BME280)のデータを、AWS IoTに送信してみました。
必要なもの
- AWSアカウント
- Raspberry Pi
- BME280 センサー
- ブレッドボードとF/Mジャンパーワイヤ
作業概要
1. AWS IoT SDK チュートリアル ー Raspberry Pi の接続の実施
2. AWS IoT Device SDK for Pythonに付属しているサンプルbasicPubSub.pyの実行
3. Raspberry Pi のセットアップとBME280の接続
4. AWS IoTへセンサーデータ(温度・気圧・湿度)を送信
1. AWS IoT SDK チュートリアル ー Raspberry Pi の接続の実施
チュートリアル通り、モノと証明書とキーペアを作成後、証明書にポリシーをアタッチします。
手順の途中で作成するパブリックおよびプライベートキー、証明書、ルート CA をダウンロードしておきます。
2. AWS IoT Device SDK for Pythonに付属しているサンプルbasicPubSub.pyの実行
SDKに付属しているAWS IoTへ送信するサンプルが動作することを確認をします。後でこのサンプルを利用して、センサーデータをAWS IoTへ送信します。
AWS IoTのドキュメントにはAWS IoT SDKの例はCとJavaScriptだけでPythonの例がありませんが、GitHubにあるAWS IoT Device SDK for Pythonに丁寧な解説が付いています。
Raspberry Piの適当なフォルダ(/hoge/fuga)にプライベートキー、証明書、ルートCAをアップロードして、SDKに付属しているサンプルbasicPubSub.pyを動かしてみます。
$ sudo pip install AWSIoTPythonSDK
$ keyPath=/hoge/fuga
$ endpoint=xxxxxxxxxxxx.iot.<リージョン>.amazonaws.com
$ rootCAFilePath=${keyPath}/<VeriSignのルートCA>
$ certFilePath=${keyPath}/xxxxxxxxxx-certificate.pem.crt
$ privateKeyFilePath=${keyPath}/xxxxxxxxxx-private.pem.key
$ git clone https://github.com/aws/aws-iot-device-sdk-python.git
$ cd aws-iot-device-sdk-python/samples/basicPubSub
$ python basicPubSub.py -e ${endpoint} -r ${rootCAFilePath} -c ${certFilePath} -k ${privateKeyFilePath} -id MyClientID -t MyTopic
AWS IoTのコンソールの[テスト]で、トピックに[MyTopic]を指定してサブスクライブして、下記が表示されれば成功です。

3. Raspberry Pi のセットアップとBME280の接続
Raspberry Piの画面からI2Cを有効にしておきます。
BME280とRaspberry Piは下図のように接続します。
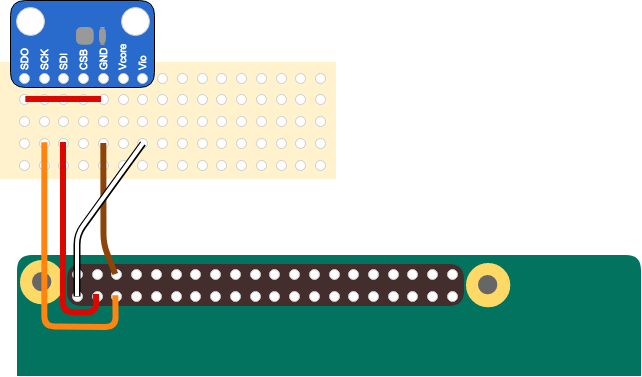
※今回はI2Cアドレスは0x76を利用するので、SDO端子をGNDにつないでおきます。
4. センサーデータ(温度・気圧・湿度)のAWS IoTへの送信
BME280からデータ(温度・気圧・湿度)を読み取るプログラム(bme280.py)を作成し、次に上で実行確認したサンプル(BasicPubSub.py)からプログラムを呼び出すようにサンプル修正してBME280からのデータをAWS IoTに送信します。
1. BME280から温度・気圧・湿度を読み取るプログラムの作成
Bosch社のBME280のデータシートやスイッチサイエンス社のサイトを参考にしました。
大まかな流れです。
1. レジスタに設定値を設定 (init_bme280)
2. 補正用データ(固定値)を取得 (read_trimming_parameter)
3. 生データを取得 (read_bme280の前半)
4. データを補正 (BME280_compensate_XXX)
from smbus2 import SMBusWrapper
import time
dig_T = []
dig_P = []
dig_H = []
t_fine = None
# I2C Address
I2CADDR = 0x76
# BME280 Register
# CTRL_HUM(0xF2)
OSRS_H = 0b001
# CTRL_MEAS(0xF4 )
OSRS_T = 0b001
OSRS_P = 0b001
MODE = 0b11
# CONFIG(0xF5)
T_SB = 0b101
FILTER = 0b000
SPI3W_EN = 0b0
def to_signed_short(val):
return -(val & 0b1000000000000000) | (val & 0b0111111111111111)
def to_signed_12bit(val):
return -(val & 0b100000000000) | (val & 0b011111111111)
def to_signed_8bit(val):
return -(val & 0b10000000) | (val & 0b01111111)
def init_bme280():
with SMBusWrapper(1) as bus:
CTRL_HUM = OSRS_H
CTRL_MEAS = (OSRS_T << 5) + (OSRS_P << 2) + MODE
CONFIG = (T_SB << 5) + (FILTER << 2) + SPI3W_EN
bus.write_byte_data(I2CADDR, 0xF2, CTRL_HUM )
bus.write_byte_data(I2CADDR, 0xF4, CTRL_MEAS)
bus.write_byte_data(I2CADDR, 0xF5, CONFIG )
def read_bme280():
with SMBusWrapper(1) as bus:
block = bus.read_i2c_block_data(I2CADDR, 0xF7, 8)
raw_pressure = block[0]*256*16 + block[1]*16 + (block[2] >> 4)
raw_temperature = block[3]*256*16 + block[4]*16 + (block[5] >> 4)
raw_humidity = block[6]*256 + block[7]
temperature = BME280_compensate_T_int32(raw_temperature)
pressure = BME280_compensate_P_int64(raw_pressure)
humidity = bme280_compensate_H_int32(raw_humidity)
return temperature, pressure, humidity
def read_trimming_parameter():
with SMBusWrapper(1) as bus:
res1 = bus.read_i2c_block_data(0x76, 0x88, 26)
res2 = bus.read_i2c_block_data(0x76, 0xE1, 7)
dig_T.append(res1[1] * 256 + res1[0]) # [7:0] / [15:8] unsigned short
dig_T.append(to_signed_short(res1[3] * 256 + res1[2])) # [7:0] / [15:8] signed short
dig_T.append(to_signed_short(res1[5] * 256 + res1[4])) # [7:0] / [15:8] signed short
dig_P.append(res1[7] * 256 + res1[6]) # [7:0] / [15:8] unsigned short
dig_P.append(to_signed_short(res1[9] * 256 + res1[8])) # [7:0] / [15:8] signed short
dig_P.append(to_signed_short(res1[11] * 256 + res1[10])) # [7:0] / [15:8] signed short
dig_P.append(to_signed_short(res1[13] * 256 + res1[12])) # [7:0] / [15:8] signed short
dig_P.append(to_signed_short(res1[15] * 256 + res1[14])) # [7:0] / [15:8] signed short
dig_P.append(to_signed_short(res1[17] * 256 + res1[16])) # [7:0] / [15:8] signed short
dig_P.append(to_signed_short(res1[19] * 256 + res1[18])) # [7:0] / [15:8] signed short
dig_P.append(to_signed_short(res1[21] * 256 + res1[20])) # [7:0] / [15:8] signed short
dig_P.append(to_signed_short(res1[23] * 256 + res1[22])) # [7:0] / [15:8] signed short
dig_H.append(res1[25]) # [7:0] unsigned char
dig_H.append(to_signed_short(res2[1] * 256 + res2[0])) # [7:0] / [15:8] signed short
dig_H.append(res2[2]) # [7:0] unsigned char
dig_H.append(to_signed_12bit(res2[3] * 16 + (res2[4] & 0x0F))) # [11:4] / [3:0] signed short
dig_H.append(to_signed_12bit(res2[5] * 16 + (res2[4] >> 4))) # [3:0] / [11:4] signed short
dig_H.append(to_signed_8bit(res2[6])) # signed char
def BME280_compensate_T_int32(adc_T):
global t_fine
var1 = (((adc_T>>3) - (dig_T[0]<<1)) * (dig_T[1])) >> 11
var2 = (((((adc_T>>4) - dig_T[0]) * ((adc_T>>4) - dig_T[0])) >> 12) * dig_T[2]) >> 14
t_fine = var1 + var2
T = (t_fine * 5 + 128) >> 8
return T / 100.0
def BME280_compensate_P_int64(adc_P):
var1 = t_fine - 128000
var2 = var1 * var1 * dig_P[5]
var2 = var2 + ((var1 * dig_P[4]) << 17)
var2 = var2 + (dig_P[3] << 35)
var1 = ((var1 * var1 * dig_P[2]) >> 8) + ((var1 * dig_P[1]) << 12)
var1 = ((1 << 47) + var1) * dig_P[0] >> 33;
if var1 == 0:
return 0 # avoid exception caused by division by zero
p = 1048576 - adc_P
p = (((p << 31) - var2) * 3125) / var1
var1 = (dig_P[8] * (p >> 13) * (p >> 13)) >> 25
var2 = (dig_P[7] * p) >> 19
p = ((p + var1 + var2) >> 8) + (dig_P[6] << 4)
return p / 256.0 / 100.0
def bme280_compensate_H_int32(adc_H):
v_x1_u32r = t_fine - 76800
v_x1_u32r = ( \
((((adc_H << 14) - (dig_H[3] << 20) - (dig_H[4] * v_x1_u32r)) + 16384) >> 15) \
* \
(((((((v_x1_u32r * dig_H[5]) >> 10) * (((v_x1_u32r * dig_H[2]) >> 11) + 32768)) >> 10) + 2097152) * dig_H[1] + 8192) >> 14) \
)
v_x1_u32r = (v_x1_u32r - (((((v_x1_u32r >> 15) * (v_x1_u32r >> 15)) >> 7) * dig_H[0]) >> 4))
if v_x1_u32r < 0:
v_x1_u32r = 0
elif v_x1_u32r > 419430400:
v_x1_u32r = 419430400
return (v_x1_u32r >> 12) / 1024.0
if __name__ == '__main__':
init_bme280()
read_trimming_parameter()
temperature, pressure, humidity = read_bme280()
print('temperature: ' + str(temperature))
print('pressure : ' + str(pressure))
print('humidity : ' + str(humidity))
2. サンプルプログラム(basicPubSub.py)の修正
basicPubSub.pyを下記のように変更し、別名(myBasicPubSub.py)で保存します。
- 上で作成したbme280.pyのインポートを追加
import bme280
- BME280からのデータを送信する部分を追加
# bme280
bme280.init_bme280()
bme280.read_trimming_parameter()
# Publish to the same topic in a loop forever
loopCount = 0
while True:
if args.mode == 'both' or args.mode == 'publish':
temperature, pressure, humidity = bme280.read_bme280()
message = {}
message['message'] = args.message
message['sequence'] = loopCount
message['temperature'] = temperature
message['pressure'] = pressure
message['humidity'] = humidity
messageJson = json.dumps(message)
myAWSIoTMQTTClient.publish(topic, messageJson, 1)
if args.mode == 'publish':
print('Published topic %s: %s\n' % (topic, messageJson))
loopCount += 1
time.sleep(1)
3. 実行
bme280.pyとmyBasicPubSub.pyを同じディレクトリに配置して実行します。
$ sudo pip install smbus2
$ python myBasicPubSub.py -e ${endpoint} -r ${rootCAFilePath} -c ${certFilePath} -k ${privateKeyFilePath} -id myClientId -t MyTopic
4. 動作確認
AWS IoTのコンソールの[テスト]で、トピックに[MyTopic]を指定してサブスクライブして、下記が表示されれば成功です。

雑感
- 一度I2C通信に慣れておけば、他のセンサーでも応用が効きそう