この記事に書いてあること
Open3D(Python版)のコードはMATLABでどのように書くのかをOpen3DのTutorialをベースに紹介していきます。2つの環境を使っている(もしくは使う予定のある)エンジニアが、「どう書くんだっけ?」と思った際の参考になればと思います。
各関数の入力引数について詳細は記載しないので、適宜ドキュメントをあたっていただければと思います。
Version
Open3D:0.18.0
MATLAB:R2024b Prerelease (主にComputer Vision ToolboxとLidar Toolbox)
点群データの読込みと表示
Open3D
必要パッケージのインポート
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
点群(PLYファイル)の読込み
ply_point_cloud = o3d.data.PLYPointCloud() # デモデータの読込み
pcd = o3d.io.read_point_cloud(ply_point_cloud.path) # PLYファイルの読込み
o3d.visualization.draw_geometries([pcd]) # 表示
データのアクセス
実体をハンドリングするためにはnp.asarrayで数値配列に変換する必要がある。
print(pcd)
print(np.asarray(pcd.points))
実行結果
PointCloud with 196133 points.
[[0.65234375 0.84686458 2.37890625]
[0.65234375 0.83984375 2.38430572]
[0.66737998 0.83984375 2.37890625]
...
[2.00839925 2.39453125 1.88671875]
[2.00390625 2.39488506 1.88671875]
[2.00390625 2.39453125 1.88793314]]
点群(PCDファイル)の読込み
PLYと一緒です。このpcd2はあとで使います。
pcd_point_cloud = o3d.data.PCDPointCloud()
pcd2 = o3d.io.read_point_cloud(pcd_point_cloud.path)
o3d.visualization.draw_geometries([pcd2])
メッシュファイルの読込み
bunny = o3d.data.BunnyMesh()
mesh = o3d.io.read_triangle_mesh(bunny.path)
o3d.visualization.draw_geometries([mesh])

MATLAB
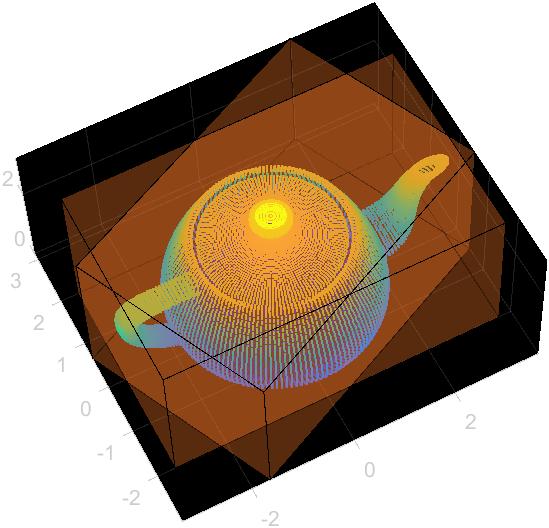
点群の読込み
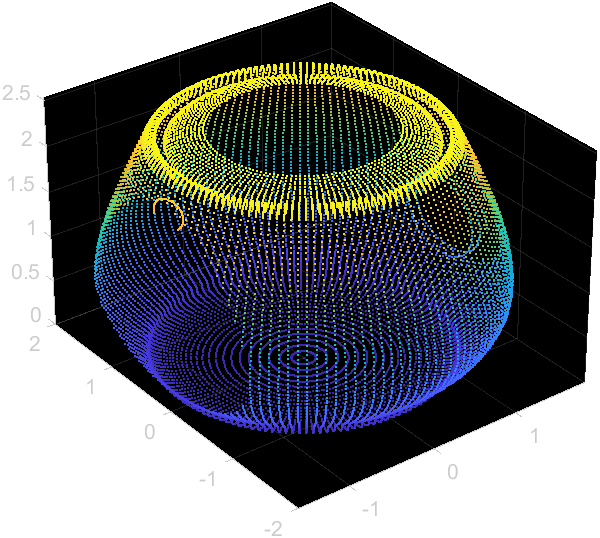
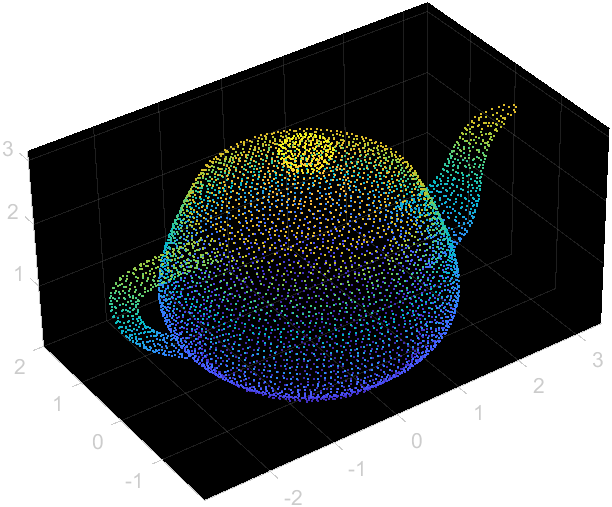
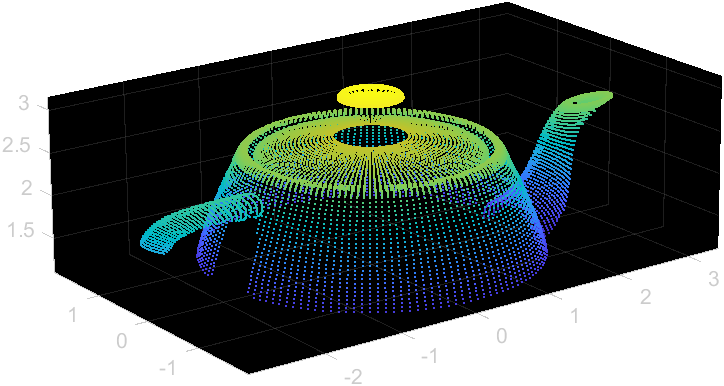
pcd = pcread('teapot.ply'); % 点群読込み
pcd % pointCloudオブジェクトの中身を表示
pcd.Location(1:10,:) % 最初の10行の座標数値情報を表示
pcshow(pcd); % 表示
実行結果
pcd =
pointCloud with properties:
Location: [41472×3 single]
Count: 41472
XLimits: [-3 3.4340]
YLimits: [-2 2]
ZLimits: [0 3.1500]
Color: []
Normal: []
Intensity: []
ans =
10×3 single matrix
0 -1.5000 2.4000
0 -1.4946 2.4109
0 -1.4890 2.4212
0 -1.4832 2.4309
0 -1.4774 2.4399
0 -1.4715 2.4482
0 -1.4656 2.4559
0 -1.4596 2.4630
0 -1.4537 2.4694
0 -1.4477 2.4752

メッシュファイルの読込み
メッシュファイルの読込みはreadSurfaceMesh関数を使う。FBXなども読み込める。
mesh = readSurfaceMesh('bunny.stl');
mesh
surfaceMeshShow(mesh);
実行結果
mesh =
surfaceMesh with properties:
Vertices: [43318×3 double]
Faces: [86632×3 int32]
VertexNormals: []
VertexColors: []
FaceNormals: [86632×3 double]
FaceColors: []
NumVertices: 43318
NumFaces: 86632
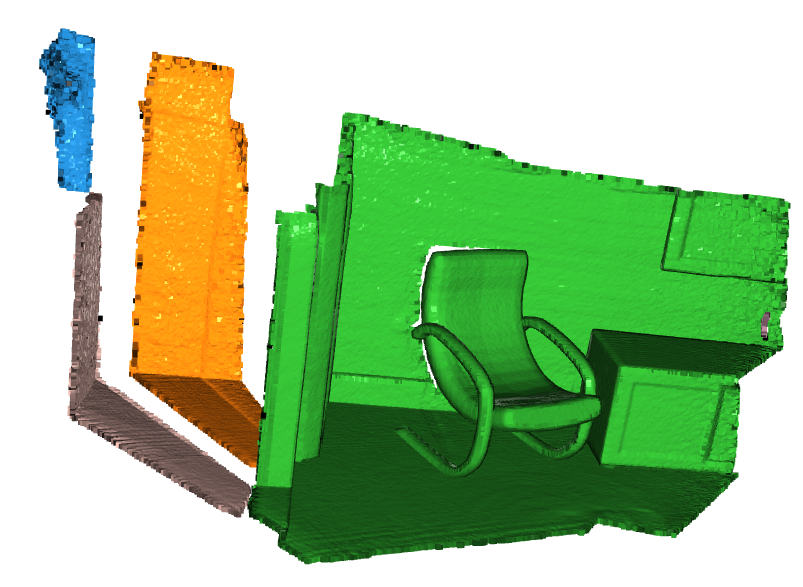
ROI抽出(ポリゴン)
Open3D
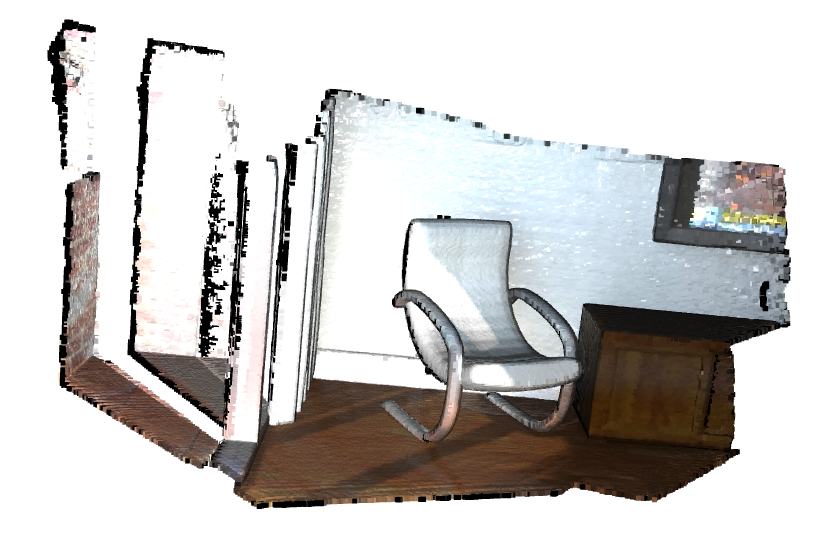
JSONファイルを読み込んで種々の設定を反映する。
demo_crop_data = o3d.data.DemoCropPointCloud()
print(demo_crop_data)
pcd = o3d.io.read_point_cloud(demo_crop_data.point_cloud_path)
vol = o3d.visualization.read_selection_polygon_volume(demo_crop_data.cropped_json_path)
chair = vol.crop_point_cloud(pcd)
o3d.visualization.draw_geometries([chair])
このデモのJSONファイルは下記のようになっていました。
{
"axis_max" : 4.022921085357666,
"axis_min" : -0.76341366767883301,
"bounding_polygon" :
[
[ 2.6509309513852526, 0.0, 1.6834473132326844 ],
[ 2.5786428246917148, 0.0, 1.6892074266735244 ],
[ 2.4625790337552154, 0.0, 1.6665777078297999 ],
[ 2.2228544982251655, 0.0, 1.6168160446813649 ],
[ 2.166993206001413, 0.0, 1.6115495157201662 ],
[ 2.1167895865303286, 0.0, 1.6257706054969348 ],
[ 2.0634657721747383, 0.0, 1.623021658624539 ],
[ 2.0568612343437236, 0.0, 1.5853892911207643 ],
[ 2.1605399001237027, 0.0, 0.96228993255083017 ],
[ 2.1956669387205228, 0.0, 0.95572746049785073 ],
[ 2.2191318790575583, 0.0, 0.88734449982108754 ],
[ 2.2484881847925919, 0.0, 0.87042807267013633 ],
[ 2.6891234157295827, 0.0, 0.94140677988967603 ],
[ 2.7328692490470647, 0.0, 0.98775740674840251 ],
[ 2.7129337547575547, 0.0, 1.0398850034649203 ],
[ 2.7592174072415405, 0.0, 1.0692940558509485 ],
[ 2.7689216419453428, 0.0, 1.0953914441371593 ],
[ 2.6851455625455669, 0.0, 1.6307334122162018 ],
[ 2.6714776099981239, 0.0, 1.675524657088997 ],
[ 2.6579576128816544, 0.0, 1.6819127849749496 ]
],
"class_name" : "SelectionPolygonVolume",
"orthogonal_axis" : "Y",
"version_major" : 1,
"version_minor" : 0
}
ポリゴンはX,Y,Zの内2軸で定義される平面で定義されるようです(違ったら誰か教えてください)。平面の法線となる軸をorthogonal_axisで指定して、orthogonal_axis上のROIはaxis_maxとaxis_minで指定するようです。
出力結果
MATLAB
MATLABに同じ機能の関数はないですが、単純な直方体や円筒形のROIの場合、pointCloudオブジェクトのfindPointsInROIとfindPointsInCylinder関数が使えます。
roi = [-1.58 1.8855 -2 2 0 2.54]; %[xmin xmax ymin ymax zmin zmax]
roiIdx = pcd.findPointsInROI(roi);
pcdROI = pcd.select(roiIdx);
pcshow(pcdROI)
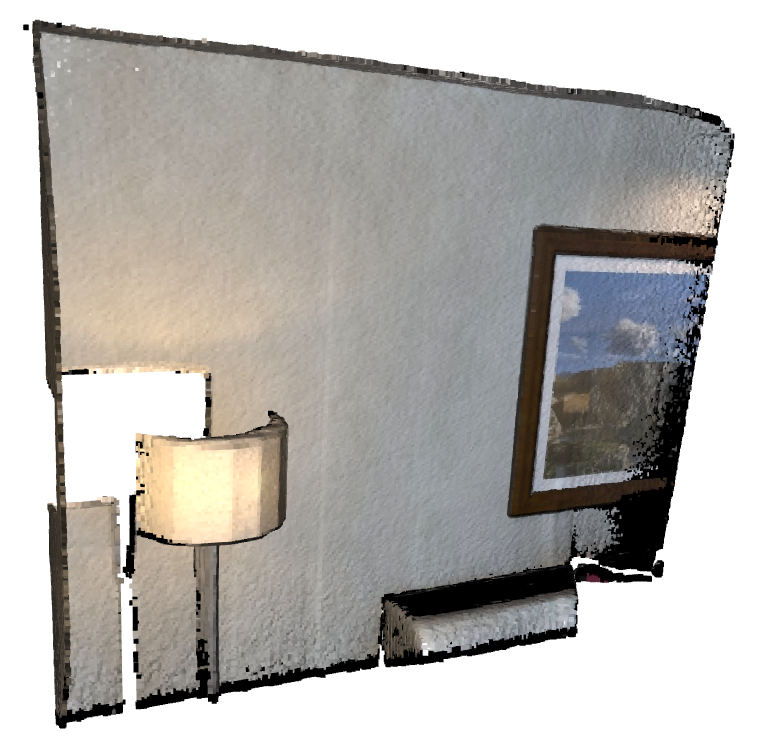
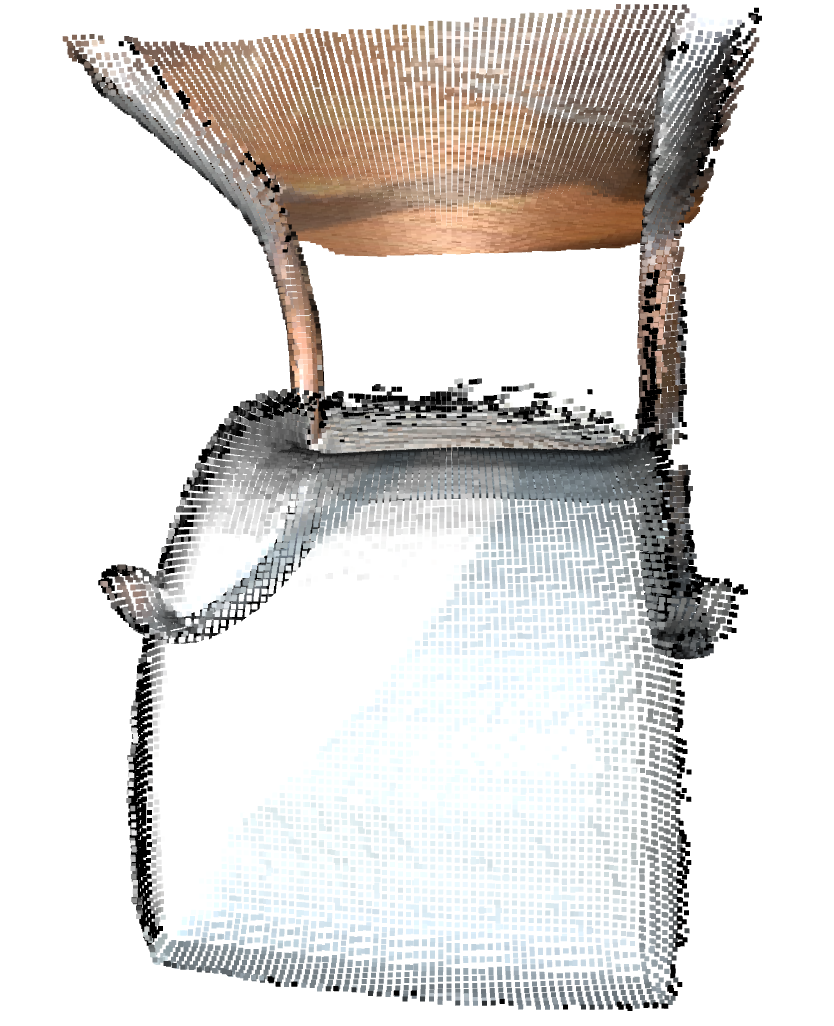
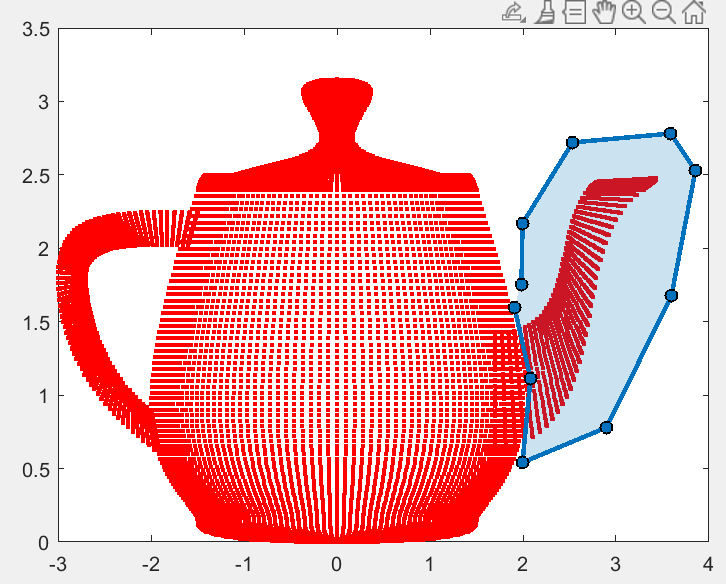
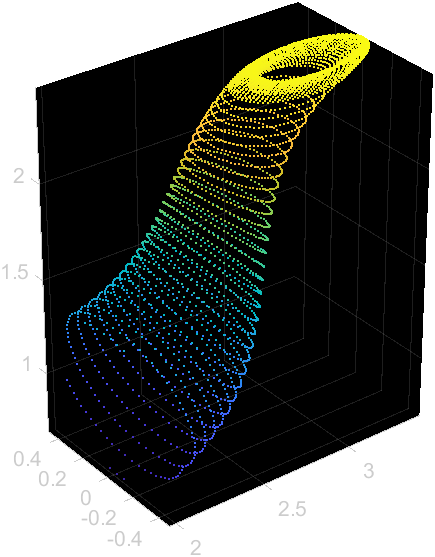
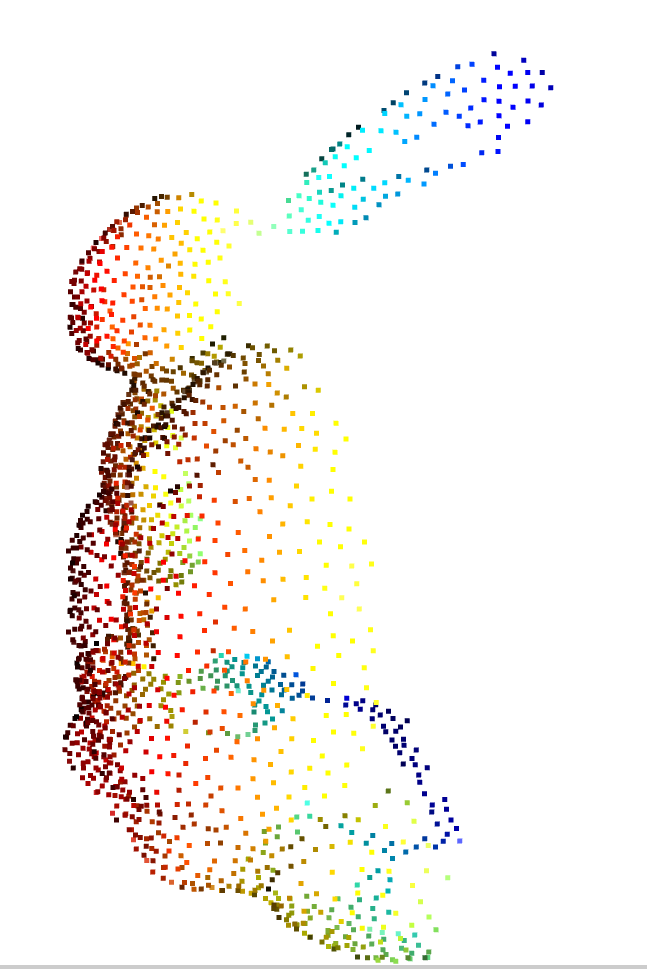
念のためOpen3Dのようなポリゴンで範囲抽出ソースコードも載せておきます。
% ポリゴンの範囲を指定
orthogonal_axis = "Y";
[axis_min,axis_max] = deal(-inf,inf); % orthogonal_axisの最小・最大値
xyz = pcd.Location; % 3次元座標値
d = dictionary(["X","Y","Z"],[1 2 3]);
proj_axis = setxor([1 2 3],d(orthogonal_axis)); % 投影面の軸を抽出
proj_points = xyz(:,proj_axis); % 投影面における座標
plot(proj_points(:,1),proj_points(:,2),'r.');
h = drawpolygon; % ポリゴンを指定
poly = h.Position;
% ポリゴン範囲の抽出
inPolyIndx = inpolygon(proj_points(:,1),proj_points(:,2),poly(:,1),poly(:,2)); % ポリゴンの範囲
inOrthoIdx = xyz(:,d(orthogonal_axis)) >= axis_min & xyz(:,d(orthogonal_axis)) <= axis_max; % orthogonal_axisの範囲
inIdx = inPolyIndx & inOrthoIdx;
pcSelected = pcd.select(inIdx); % 範囲内点群を選択
pcshow(pcSelected)
出力結果
ポリゴン選択
選択後
ダウンサンプリング
グリッドの中かから1点選択するやつです。
Open3D
downpcd = pcd.voxel_down_sample(voxel_size=0.1)
MATLAB
downpcd = pcdownsample(pcd,'gridAverage',0.1);
ランダムサンプリングなどもできる(pcdownsample)。
法線推定
Open3Dは主成分分解ベースの法線推定アルゴリズム、MATLABの方は平面近似がベースのアルゴリズムになっているため、出てくる値は異なります。
Open3D
downpcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30)) # 主成分分析ベース
print(downpcd.normals[0]) # 法線の1行目
print(np.asarray(downpcd.normals)[:10, :]) # 上から10行
実行結果
[ 0.00348136 -0.09321477 -0.99563994]
[[ 0.00348136 -0.09321477 -0.99563994]
[-0.02348153 0.20308955 0.97887857]
[ 0.98798252 -0.06762201 -0.13898847]
[ 0.00864165 -0.05437875 -0.99848299]
[ 0.00864159 -0.05437876 -0.99848299]
[ 0.01261311 -0.72752996 -0.68595995]
[ 0.00175451 -0.0256587 -0.99966922]
[ 0. 0. 1. ]
[ 0. 0. 1. ]
[-0.01916377 0.13835191 0.99019771]]
MATLAB
downpcd.Normal = pcnormals(downpcd,30); % 近傍の30点を平面近似
downpcd.Normal(1,:)
downpcd.Normal(1:10,:)
実行結果
ans =
1×3 single row vector
-0.1595 -0.5931 -0.7892
ans =
10×3 single matrix
-0.1595 -0.5931 -0.7892
0.1211 0.5680 0.8141
0.0749 0.5508 0.8313
0.0231 0.5488 0.8356
0.0325 0.5447 0.8380
-0.0063 0.5462 0.8376
-0.0368 0.5327 0.8455
-0.0682 0.5525 0.8307
-0.1102 0.5289 0.8415
0.1595 -0.5931 -0.7892
色の変更
Open3D
chair.paint_uniform_color([1, 0.706, 0])
o3d.visualization.draw_geometries([chair])
出力結果

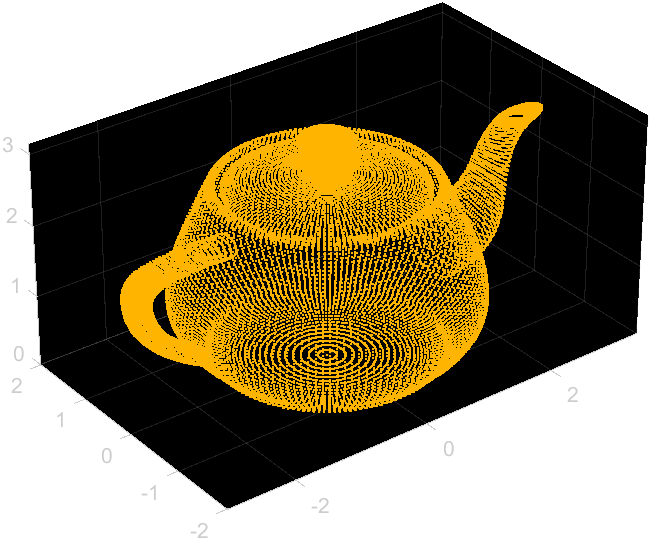
MATLAB
pcd.Color = repmat([1 0.706 0],pcd.Count,1);
pcshow(pcd,'ColorSource','Color');
出力結果
点群間の距離
Open3D
dists = pcd.compute_point_cloud_distance(chair)
dists = np.asarray(dists)
ind = np.where(dists > 0.01)[0]
pcd_without_chair = pcd.select_by_index(ind)
o3d.visualization.draw_geometries([pcd_without_chair])
MATLAB
[indices, dists] = pcdROI.multiQueryKNNSearchImpl(pcd.Location,1);
distIdx = dists'>0.01; % 行ベクトルに変換する
pcdROIout = pcd.select(distIdx);
pcshow(pcdROIout);
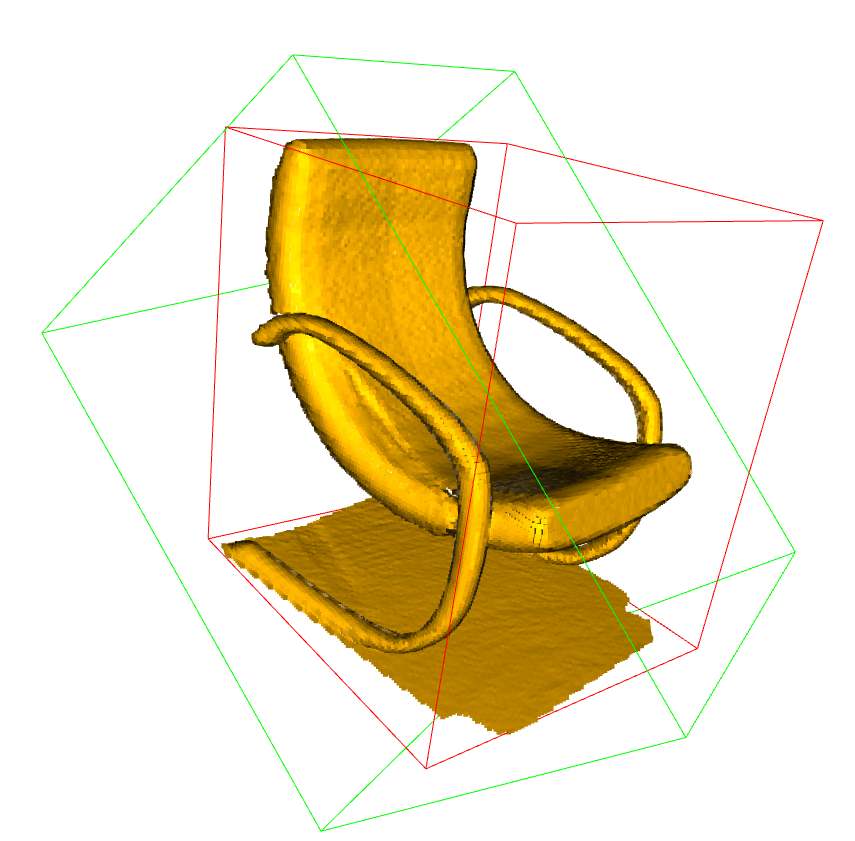
境界ボックス
Open3D
軸に沿ったボックスフィッティングと、3次元的なフィッティングの両方をサポートしている。
aabb = chair.get_axis_aligned_bounding_box()
aabb.color = (1, 0, 0)
obb = chair.get_oriented_bounding_box()
obb.color = (0, 1, 0)
o3d.visualization.draw_geometries([chair, aabb, obb])
MATLAB
yaw角だけ考慮した直方体フィッティングか関数として利用可能。軸に沿った直方体は手計算となる。
% yaw角のみ考慮したフィッティング
mdl = pcfitcuboid(pcd);
pcshow(pcd)
hold on;
h1 = mdl.plot;
% 軸に合わせたフィッティング
limits = [pcd.XLimits;pcd.YLimits;pcd.ZLimits];
centers = mean(limits,2);
sizes = diff(limits,1,2);
mdlAxes = cuboidModel([centers',sizes',0 0 0]);
h2 = mdlAxes.plot;
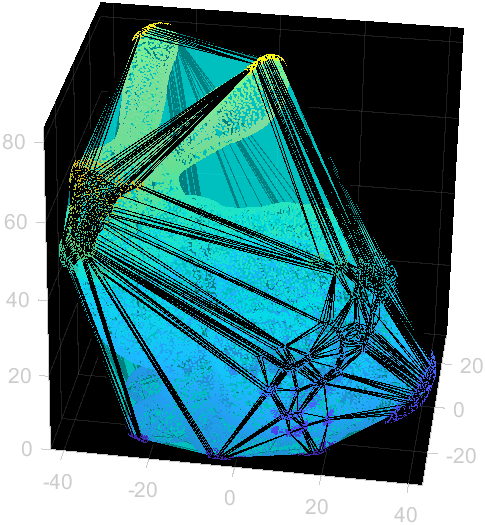
点群の凸包
Open3D
pcl = mesh.sample_points_poisson_disk(number_of_points=2000)
hull, _ = pcl.compute_convex_hull()
hull_ls = o3d.geometry.LineSet.create_from_triangle_mesh(hull)
hull_ls.paint_uniform_color((1, 0, 0))
o3d.visualization.draw_geometries([pcl, hull_ls])
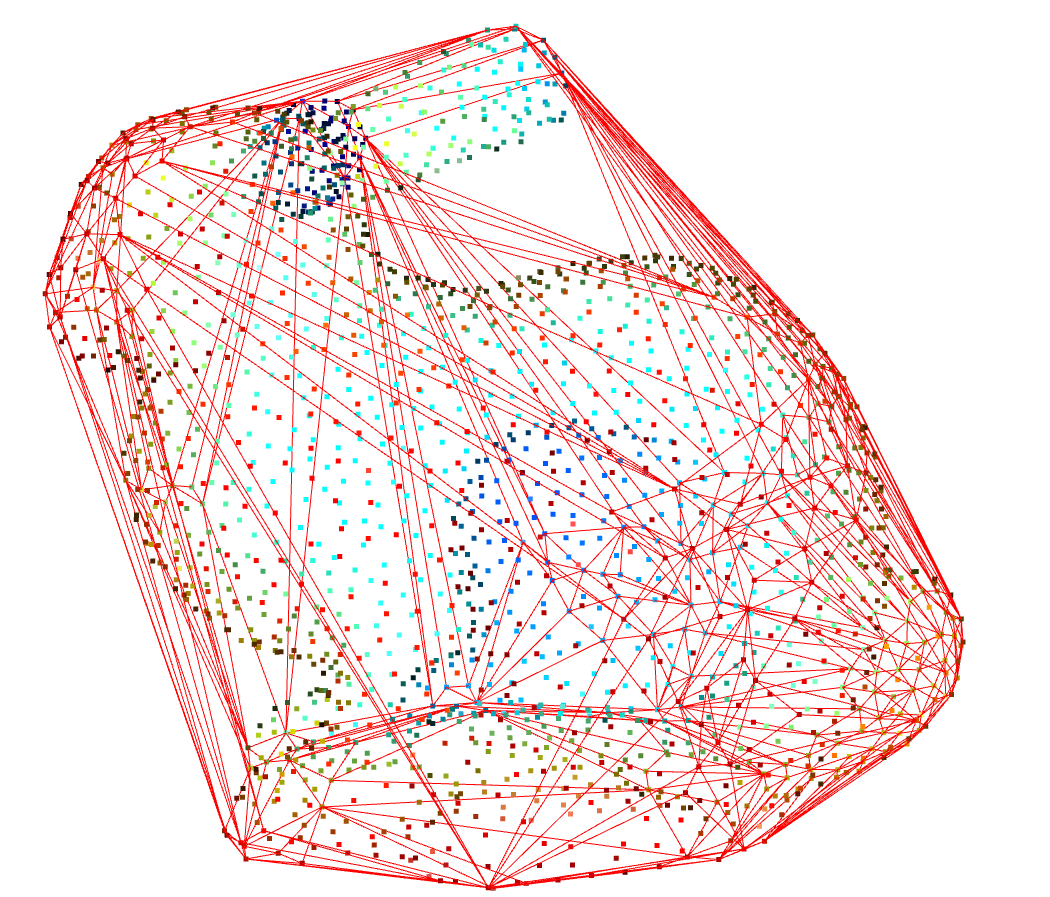
MATLAB
DT = delaunayTriangulation(mesh.Vertices);
[C,v] = DT.convexHull;
pcshow(mesh.Vertices,'MarkerSize',10);
hold on;
trisurf(C,DT.Points(:,1),DT.Points(:,2),DT.Points(:,3), ...
'FaceColor','cyan','FaceAlpha',0.5)
クラスタリング
Open3D
DBSCANベース
with o3d.utility.VerbosityContextManager(
o3d.utility.VerbosityLevel.Debug) as cm:
labels = np.array(
pcd.cluster_dbscan(eps=0.02, min_points=10, print_progress=True))
max_label = labels.max()
print(f"point cloud has {max_label + 1} clusters")
colors = plt.get_cmap("tab20")(labels / (max_label if max_label > 0 else 1))
colors[labels < 0] = 0
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcd],
MATLAB
DBSCANベースの方法はstatistics and machine learning Toolboxにありますが、点群処理として標準的に用いるToolboxであるComputer Vision ToolboxおよびLidar Toolboxでは、距離ベースの手法でのクラスタリングアルゴリズムがサポートされています。
[labels,numClusters] = pcsegdist(pcdROIout,0.1);
pcshow(pcdROIout.Location,labels)
colormap(hsv(numClusters))
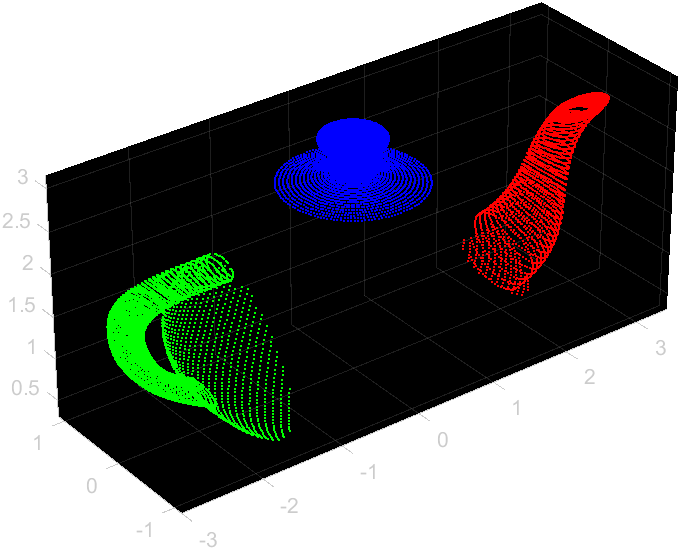
平面のセグメンテーション
Open3D
plane_model, inliers = pcd2.segment_plane(distance_threshold=0.01,
ransac_n=3,
num_iterations=1000)
[a, b, c, d] = plane_model
print(f"Plane equation: {a:.2f}x + {b:.2f}y + {c:.2f}z + {d:.2f} = 0")
inlier_cloud = pcd2.select_by_index(inliers)
inlier_cloud.paint_uniform_color([1.0, 0, 0])
outlier_cloud = pcd2.select_by_index(inliers, invert=True)
o3d.visualization.draw_geometries([inlier_cloud, outlier_cloud])

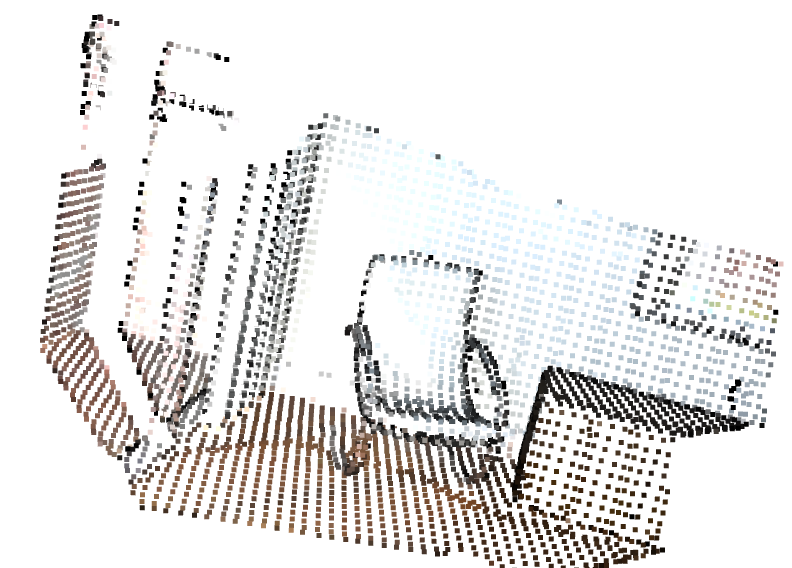
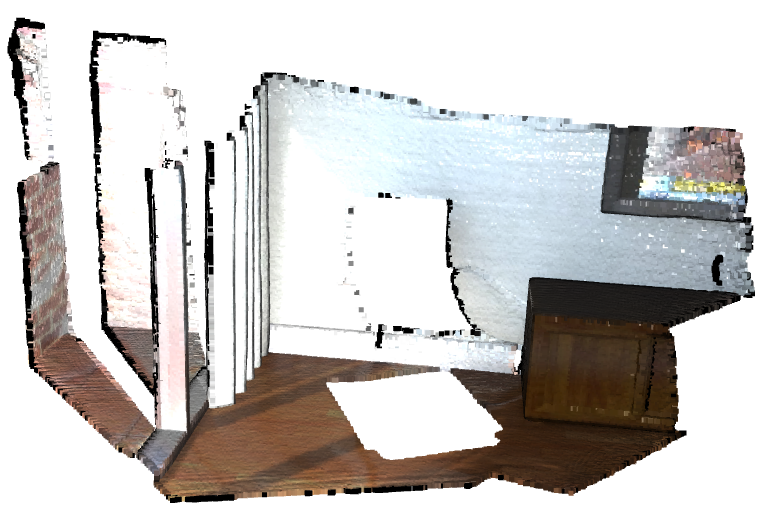
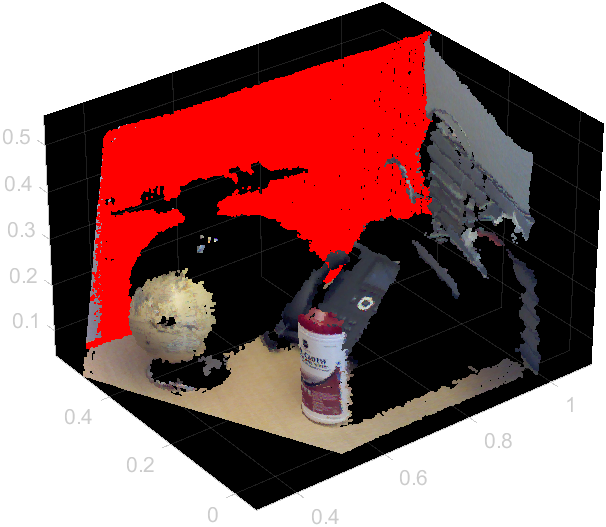
MATLAB
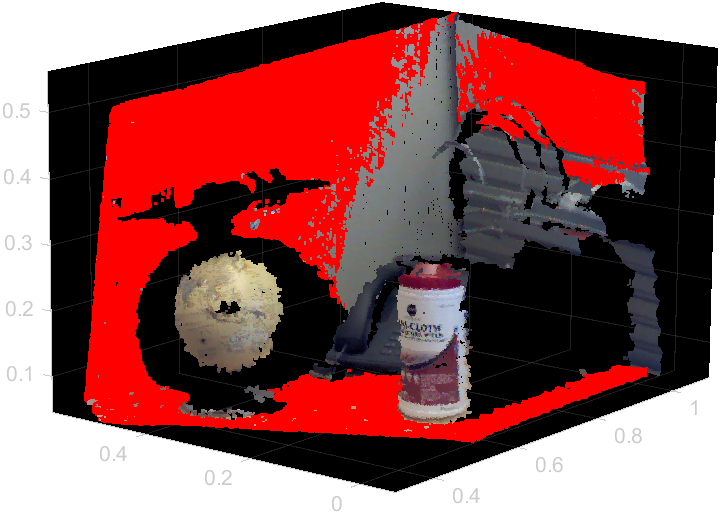
load object3d.mat
[mdl,inlier,outlier] = pcfitplane(ptCloud,0.01);
pcInlier = ptCloud.select(inlier);
pcshow(ptCloud);
hold on;
pcshow(pcInlier.Location,'r')
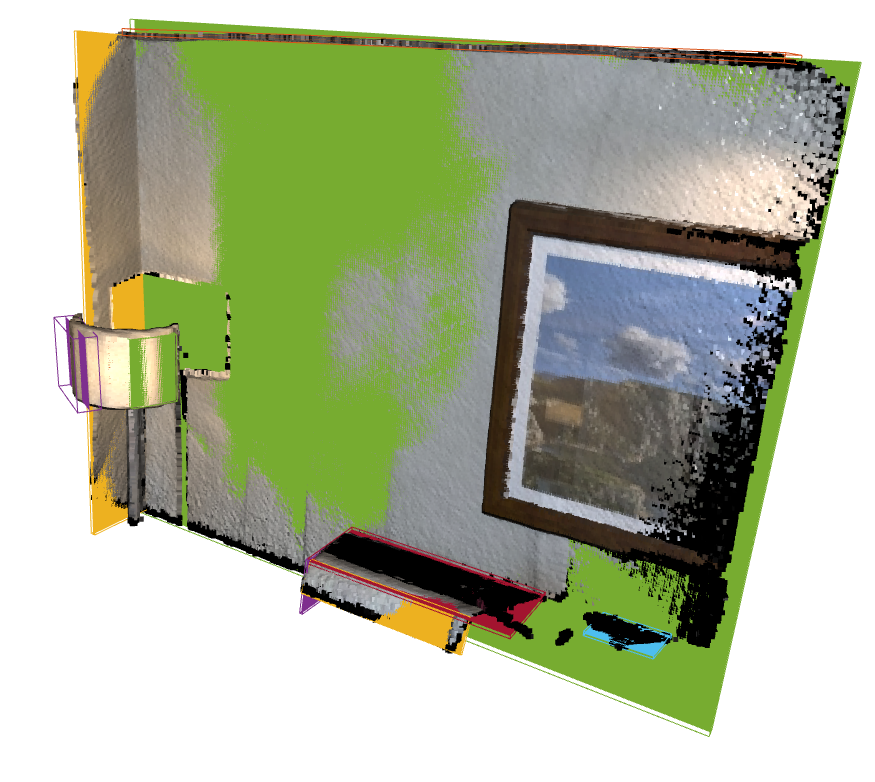
平面パッチ検出
Open3D
oboxes = pcd2.detect_planar_patches(
normal_variance_threshold_deg=60,
coplanarity_deg=75,
outlier_ratio=0.75,
min_plane_edge_length=0,
min_num_points=0,
search_param=o3d.geometry.KDTreeSearchParamKNN(knn=30))
print("Detected {} patches".format(len(oboxes)))
geometries = []
for obox in oboxes:
mesh = o3d.geometry.TriangleMesh.create_from_oriented_bounding_box(obox, scale=[1, 1, 0.0001])
mesh.paint_uniform_color(obox.color)
geometries.append(mesh)
geometries.append(obox)
geometries.append(pcd2)
o3d.visualization.draw_geometries(geometries)
MATLAB
load object3d.mat
ptCloud.Normal = pcnormals(ptCloud,30); % 法線推定が前提
[labels,numPlanes,varargout] = pcsegplanes(ptCloud,"MinNumPoints",3000,"MinDimensionSize",0.3);
pcshow(ptCloud);
hold on;
for i = 1:numPlanes
ptCloud_this = ptCloud.select(labels==i);
pcshow(ptCloud_this.Location,'r','MarkerSize',20);
end
hold off;
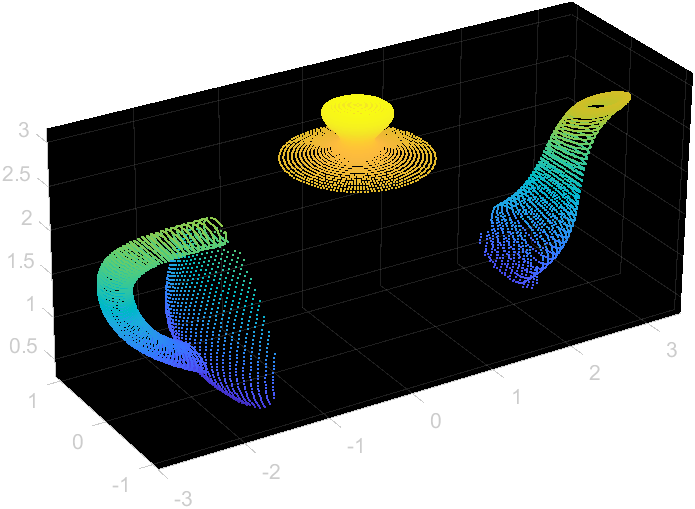
隠点の除去
Open3D
pcd3 = mesh.sample_points_poisson_disk(5000)
diameter = np.linalg.norm(
np.asarray(pcd3.get_max_bound()) - np.asarray(pcd3.get_min_bound()))
o3d.visualization.draw_geometries([pcd3])
print("Define parameters used for hidden_point_removal")
camera = [0, 0, diameter]
radius = diameter * 100
print("Get all points that are visible from given view point")
_, pt_map = pcd3.hidden_point_removal(camera, radius)
print("Visualize result")
pcd3 = pcd3.select_by_index(pt_map)
o3d.visualization.draw_geometries([pcd3])
MATLAB
pcd_removed = removeHiddenPoints(pcd,[0,0,10]); % 視点を入力
pcshow(pcd_removed);
まとめ
Open3D(Python)とMATLABの点群処理系のコードの対応を調べました。対応するものがないものもありましたが、他の関数で書けたりおよそ代替する関数があります。うまく使いこなしていきたいですね。