※こちらはPythonデータ分析勉強会#06の発表資料です。
本稿は、ラズパイ+物体検出を使って「将棋駒」を検出するプロジェクトの続きです。
もはや将棋駒ではなく、違うものを検出させていますが、気にせず進めます。
一応、過去の記事のリンクも貼っておきます。
今回は、物体検出を使って組立検査機を作ってみました。
まずは結果から
部品の組み立て工程では、ボルトの締め忘れや組付け間違いがしばしば発生します。
今回は、物体検出を使って組立工程をチェックする検査機を作りました。
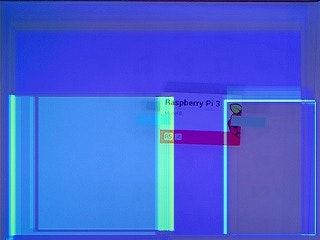
正常工程
ヒートマップ(正常)
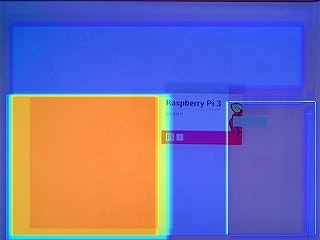
異常工程
ヒートマップ(異常)
組立検査の難しさ
組立検査は難しいものがあり、現状では決定版はないものと思われます。
その難しさの要因は、以下のようなものが挙げられます。
- 完成後の外観検査ではチェックできない。(外から見えない部分で組立間違いがあるかもしれない)
- 組立間違いがあっても、動作チェックで不具合が出ない。
特に2番目の方は、根が深く、短期間使っている分には問題ないが、長期間
使っているといきなり壊れるといったケースもあるので、重大クレームに
なってしまうこともあります。
IOTの普及によりカウンタ付きドライバーなどが開発され、記録できる工程も
出てきましたが、接着剤の塗布など記録できない工程もあります。
物体検出×組立工程
今回の取り組みは、物体検出を使って組立中の手を認識して、正常な作業時間と
位置になっているかどうかをチェックするものです。
使い方
まずは、使ってみたいという人は以下の方法で使ってみてください。
環境
- Raspberry Pi 3
- NCS1(Movidius)かNCS2を装着
- OpenVINOがインストール済(インストール手順は前回の記事を参照。)
- USBカメラ
ダウンロード
こちらのリポジトリから main.pyをダウンロード
@PINTO さんのリポジトリから lrmodelをダウンロード
二つのフォルダを同一のフォルダに入れ、以下のコマンドで実行します。
python3 main.py -wd 640 -ht 480
手順
後は、以下の手順で動かしてください。
- 画面が立ち上がったら、[m]ボタンを押して人の手の動きを認識させてください。
- 認識が終わったら、[e]ボタンを押してください。
- お手本ヒートマップ(「Reference」)が出てきますが、ここでは無視してください。
次に検査工程に入ります。
- [s]ボタンを押して先ほどの手の動きを再現してください。
- 認識が終わったら、[e]ボタンを押してください。
- 検査ヒートマップ(「Result」)が出てきます。
- 正常な手の動きをしたのであれば、ほとんど赤い部分はないはずです。
- 異常な手の動きをしたのであれば、その部分が赤くなっているはずです。
- 再度、[s]ボタンで検査、[e]ボタンで検査ヒートマップの出力ができます。
- [q]ボタンで終了します。
アルゴリズム
謝辞
@PINTOさんがこちらのリポジトリで MultiStickSSDwithUSBCamera_OpenVINO_NCS2.pyを
作ってくれました。かなりシンプルなコードになっています。感謝!!
私は、RealSenseを持っていないため、上記のコードをベースにしました。
変更点
オリジナルのコードに対し変更点は##を付けています。
気になる方は main.pyを追って見てください。
主な変更点は以下のとおりです。
- Personを検知したときだけ、赤い表示が出る。
- 文字を黒に変更(組み立て工程は白い背景が多いため)
- 存在確率の閾値を変更(60% → 30%)
- 組立ヒートマップのアルゴリズムを組み込む
- フォルダ内にヒートマップを保存する
ヒートマップの仕組み
ヒートマップの生成は基本的にPersonと認識したときだけ、演算しています。
お手本ヒートマップ
まずは、お手本ヒートマップを作ります。仕組みは簡単です。
下の図は5×5ピクセルの画像をイメージしたものです。
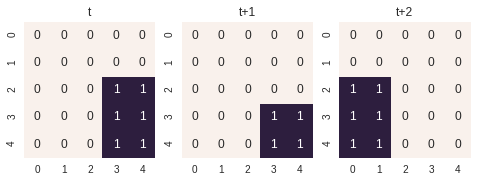
t時間で右下にPerson(手)と認識したとします。このとき、そこの部分を1にしておきます。
そして、t+1時間でも右下にPerson(手)と認識したとして、1にしておきます。
t+2時間では左下でPerson(手)と認識したとします。
最後にそれらを足し合わせると下図のようになります。
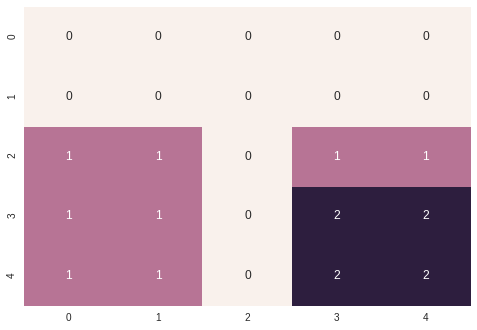
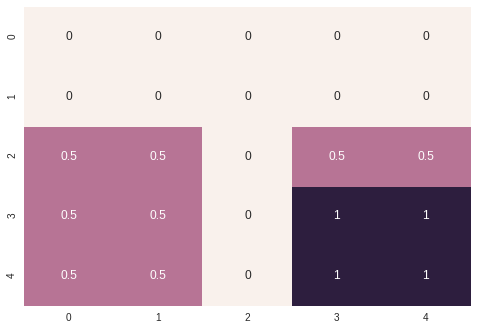
最後に0~1になるように標準化します。
上の図全体を2で割ります。すると、下図のようなお手本ヒートマップの出来上がります。
検査ヒートマップ
検査工程では、お手本ヒートマップと同じように、マップを作り、
お手本ヒートマップの差をとって絶対値化しています。
あとは、カメラの画像と合成して出力しています。
結果
以下に動作の様子を示します。
本来であればラズパイ + NCS2は20FPS(NCS1は8FPS)で高速に動くのですが、
動画保存用にOpenCVを動かしているため、少し遅くなっています。
お手本の動作
最初にお手本の動作です。
今回は組立工程を簡単にするため、付箋を貼る動作を題材にしています。
1つの付箋を3秒くらいで貼っています。
お手本ヒートマップは以下のようになっています。
比較的、右手を検出した時間が長くなっているようです。
正常な動作
これ以降、動画と検査ヒートマップをセットで示します。
まずは、正常な動作です。
ご覧のとおり、ほとんど赤い部分はなく、正常な動作が可視化できています。
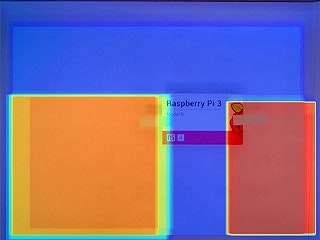
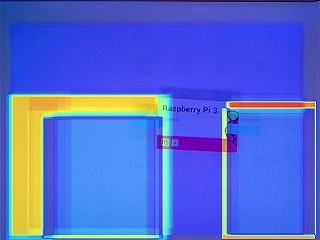
右しかやっていない場合(異常)
右しか付箋を貼っていない場合です。
ご覧のように左側にオレンジ色の異常部分が出てきました。
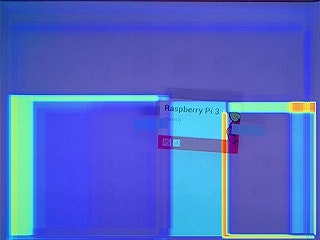
左しかやっていない場合(異常)
左しか付箋を貼っていない場合です。
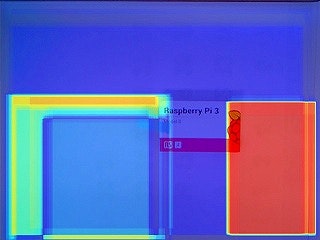
ご覧のように右側に赤色の異常部分が出てきました。
長時間の動作(正常)
ベテランの人は早く作業できますが、慣れていない人は
長時間の作業時間になってしまうこともあります。
前述したとおり、検査工程のマップではお手本マップと同様に標準化しているため、
全体の作業時間が長くなっても同じ土俵で比較できます。
お手本の動作に対し、2倍時間がかかっていますが、大体正常な検査ヒートマップになっています。
検出枠に少しズレがあるのが気になります。
検出枠のズレへの対処方法は後述します。
両手でやった場合(正常)
人によって組立手順は違います。
右からやる人もいれば、左からやる人もいるかもしれません。
もしくは、両手でやる人もいるかもしれません。
ときどき、左右の手が一つの検出枠になってしまうこともありますが、
検査ヒートマップでは大体正常になっています。
ガチでやる人のために
もっと本気でやる人のために、メモを残しておきます。
手の検出精度を上げるには
MobileNET + SSDの「Person」は本来「手」ではなく、「人体」全体を学習させています。
従って、手の検出精度は悪いです。顔が入っていれば、ほぼ100%検出できるのですが・・・
ただ、色の濃い長袖(作業着など)を着ると手の検出精度が上がります。
白い生地のものはダメみたいです。
位置ズレに弱い
現状は、記憶させたヒートマップと差をとっているだけなので、位置ずれに対し
脆弱です。ただ、ヒートマップを画像として認識させ、ディープラーニングで
異常判定させると非常に安定し、柔軟性がある検査ヒートマップが生成されると思います。
複雑な工程に対応できない
工具を使った複雑な工程はうまく判定できない可能性があります。ここは、手ではなく
工具を認識させた方が安定した結果が得られると思われます。
複数工程に対応できない
例えば、ある部品のA面でボルトを締め、裏返してB面で接着剤を塗るといった
複数工程がある場合、現状では対応できません。実は、ここでもアイディアがあり、
複数工程を自動検出できると考えています。
ただ、論文にできるかもしれないので、まだお話しはできません。
もし企業の方で一緒に開発したいという方がいらっしゃれば、共同研究など対応
できるかもしれません。その場合は、メールしていただけると幸いです。
メールアドレスはプロフィールに書いてあります。
まとめ
- 物体検出を使って組立工程の検査機を作りました。
- 組立工程だけではなく、他の作業でも応用が利くかもしれません。
- 工具など新たなものを学習させる場合、時間と労力がかかるので、ある程度覚悟して望まないと闇の世界に落ちます!お気をつけください。