概要
前回のRaspberry Pi Zero で自律飛行ドローンを作るぞ(第1回:浮上まで) から約一か月、姿勢制御に挑戦してみて難しさが見えてきた。
ここらで一回整理することにしました。
やろうとしたこと
ジャイロセンサ(MPU-6050)出力の3軸(roll(ロール:進行方向に対し前後を軸にした回転)pitch(ピッチ:進行方向に対し左右を軸にした回転)Yaw(ヨー:進行方向に対し上下を軸にした回転))を制御して機体の水平維持を試みる。
そこで、まずはrollだけを制御することにした。
やったこと
ハード面
- 機体前後を押さえる冶具を作った。
- センサ配線をしっかりと作った
- raspberrypi zeroはLipoバッテリ1セルで駆動することにした。(5vに昇圧しなくても動作しているのでOKとした)
- プロペラガードを付けた。
- プロペラを5030から5045に変えた。
- モーター用Lipoバッテリを2セルから3セルに増やした。
ソフト面
動作検証結果
- 冶具ありの場合となしの場合で浮上させてみたが、納得のいくものにはらなかった。。
冶具あり動画(YouTube)
- 回転数を上げれば上昇することはわかった。
- ふらつきはまだまだ大きすぎる。
- roll制御は未完成。。
冶具なし動画(YouTube)
- roll制御だけなので、やはりどっかに行ってしまう。(機体の重い方とか)
- 飛んでいく方向が制御できないので出力を上げられない。
- roll制御どころではない。

わかったこと
- 難しいことがわかった。(実感した)
- PID制御の値を定めることができない。
- 冶具ありとなしで同じ制御は使えなそう。
- 回転するプロペラが危険。
- 機体の重量バランスは大事
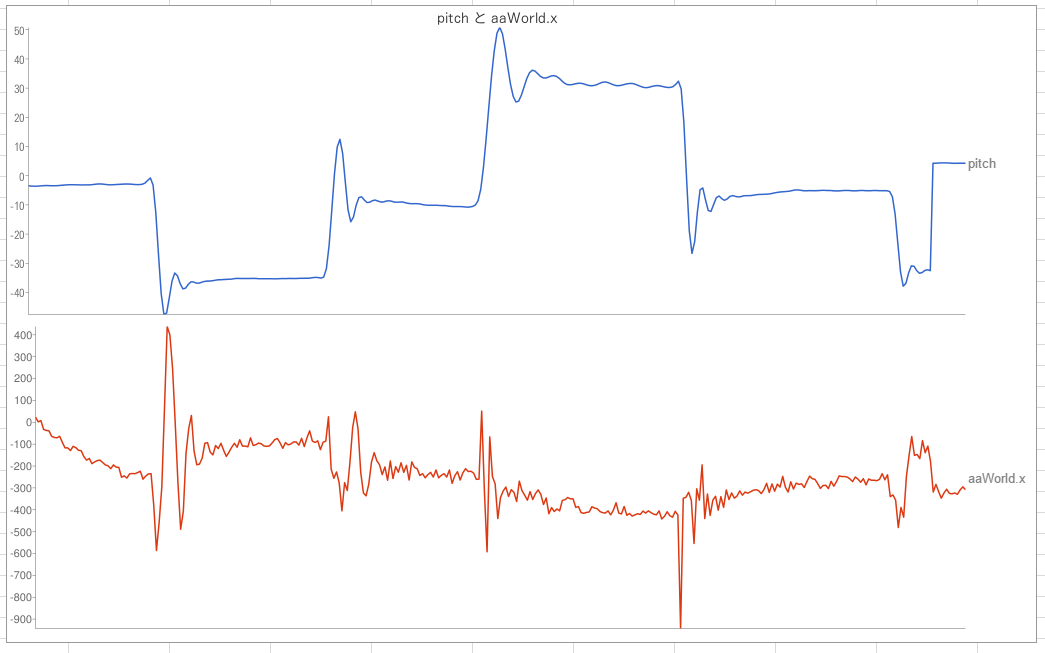
- 加速度も取得できるので考慮したほうがよさそう。(下図はpitchと加速度aaWorld.xの測定結果)
次にやること
- 冶具なしで検証できるようする方法を考える。
- 加速度を計算に加える
- 継続してPID制御を検証する
- プロペラガードを強化する。
- roll以外の制御も考えないと。。
この続きは、Raspberry Pi Zero で自律飛行ドローンを作るぞ(第3回:フライトコントローラを使いました...)
コード(GitHub)