目的
Jetson nanoにROS melodic/turtlebot3モデル/arucoライブラリをインストールした際の備忘録です
turtlebot3モデルはGAZEBOで利用するためのモデルです。
arucoは、ARマーカー読み取りライブラリです。
準備
Jetson nano
- NVIDIA Jetson Nano Developer Kit - 強力 AI コンピュータ 開発者キット
- ACアダプター 5V 4A
32GB micro SDカード-
microSDXC 128GB SanDisk サンディスク Extreme PRO
(【性能同じくらいでお手頃なモデル】microSDXC 128GB )
以下、必要に応じて
- (必要に応じて) BUFFALO wifi ドングル BUFFALO-無線LAN子機-コンパクトモデル-11n技術・11g-WLI-UC-GNM/dp/B003NSAMW2
- (必要に応じて) USBキーボード、マウス
- (必要に応じて) HDMI接続可能なディスプレイ
もっと安いモデルがあればそちらでも可
斜線 は試すも使うのを敬遠したもの。シミュレータや機械学習するならr/w早い方が効率的
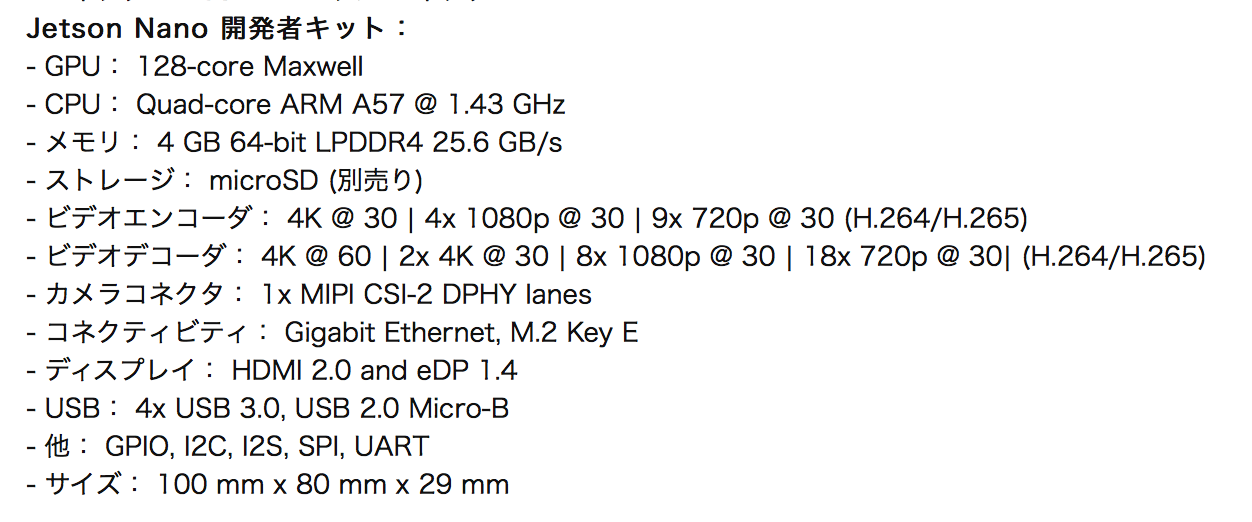
◼️Jetson nano 開発者キット スペック
起動イメージは以下から入手します。
JetPack SDK--> "Download the SD Card Image"からダウンロード(2020/11/1時点だとJetPack 4.4.1が最新)
SDカードへの書き込みは、Etcherなどのソフトが便利です。
インストール
1.ROS melodicをインストール
以下を参考にさせて頂きます。
$ git clone https://github.com/karaage0703/jetson-nano-tools $ cd jetson-nano-tools $ ./install-ros-melodic.sh
2.turtlebot3ロボットモデルのインストール
$ sudo apt-get install ros-melodic-turtlebot3
$ sudo apt-get install ros-melodic-turtlebot3-msgs
$ sudo apt-get install ros-melodic-turtlebot3-simulations
3.arucoのインストール
3.1.workspace作成がまだであれば、作成します。
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
$ cd ~/catkin_ws/
$ catkin_make
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
3.2.arucoのgithubリポジトリをクローンします。
$ cd ~/catkin_ws/src
$ git clone https://github.com/pal-robotics/aruco_ros
3.3.catkin makeでarucoをビルドします。
$ cd ~/catkin_ws/
$ catkin_make
--> catkin_makeが成功したらOK。(その後、rebootが必要な場合があります)
CodingError対策
$ sudo apt-get install ros-melodic-aruco-ros
パッケージリストを読み込んでいます... 完了
依存関係ツリーを作成しています
状態情報を読み取っています... 完了
E: パッケージ ros-kinetic-melodic-ros が見つかりません
melodic-ros packageは見つからないようなので、
arucoをビルドして解決(3.arucoのインストール 参照)
参考
Jetson NanoにROSをインストールする方法
ros turtlebot3
ros create_a_workspace
ros aruco