前提知識と注意事項
- Ibis trackersはSlimeVR互換のフルトラッキングデバイスです。Wi-Fiの代わりにnRF通信(Bluetoothに似た低遅延通信)を使用する「Smol Slimes」の一種です。詳細についてはSmol Slimesの公式ドキュメントをご参照ください。
- この記事は2026年4月時点での製作例です。時間がたてば仕様が変更される可能性があります。
- 本記事を参考にして生じたトラブル等に関しましては、責任は負えません。あくまで自己責任でお願いします。不明点があればSlimeVRのDiscordサーバーで質問・検索することをおすすめします。
はじめに
今回製作するのは、IMU方式を利用した10点フルトラッキングシステムです。
製作にかかった費用は、サポート用品(工具など)を除いて約23,859円でした。この記事では、ハードウェアの組み立てからファームウェアの導入、そして複数台接続時に陥りやすい**「Status 26」通信エラーの解決アプローチ**までを解説します。
1. 必要な部品と工具
初期不良やはんだ付けの失敗に備えて、目標製作数に対して20%程度の予備を購入しておくことを強くおすすめします。(今回は10点分に対して12セット分を購入しています)
メインパーツ
| 部品名 | 数量 | 参考価格 | 備考・リンク |
|---|---|---|---|
| ProMicro系 nRF52840 ボード | 12個 | ¥5,305 | AliExpress |
| LSM6DSV IMU | 12個 | ¥11,180 | 一般的なICM-45686の在庫がなかったため同等性能のこちらを採用。Booth(白猫屋) |
| 2-pin タクタイルスイッチ | 50個入 | ¥267 | サイズが異なるとケースに干渉する恐れがあります。AliExpress |
| カプトンテープ | 1ロール | ¥565 | 基板の絶縁用に使用します。AliExpress |
| アンテナ用ワイヤ | 3m×2本 | ¥442 | 適切な長さ(約31mm)にカットして使用。AliExpress |
| LiPoバッテリー | 10個 | ¥2,882 | 401230系(120mAh)。約36時間動作。AliExpress |
| Ibis Tracker ケース | - | - | 3Dプリンタで出力。Ibis Trackers (GitHub) |
| ストラップ(べんりベルト) | 4本入 | ¥110 | ダイソーなどで購入できる30mm幅のベルト。ダイソーネットストア |
| Holyiot-21017 receiver | 1個 | ¥3,108 | PCに接続するレシーバー(ドングル)。AliExpress |
バッテリーについての注意
LiPo電池には厳格な運用電圧の閾値が存在するため、扱いには十分注意してください。また、上記リンクと異なるバッテリーを購入する場合、3Dプリントケースに収まるかサイズを必ず確認してください。海外からの輸送には時間がかかるため早めの注文を推奨します。
サポート用品(工具類)
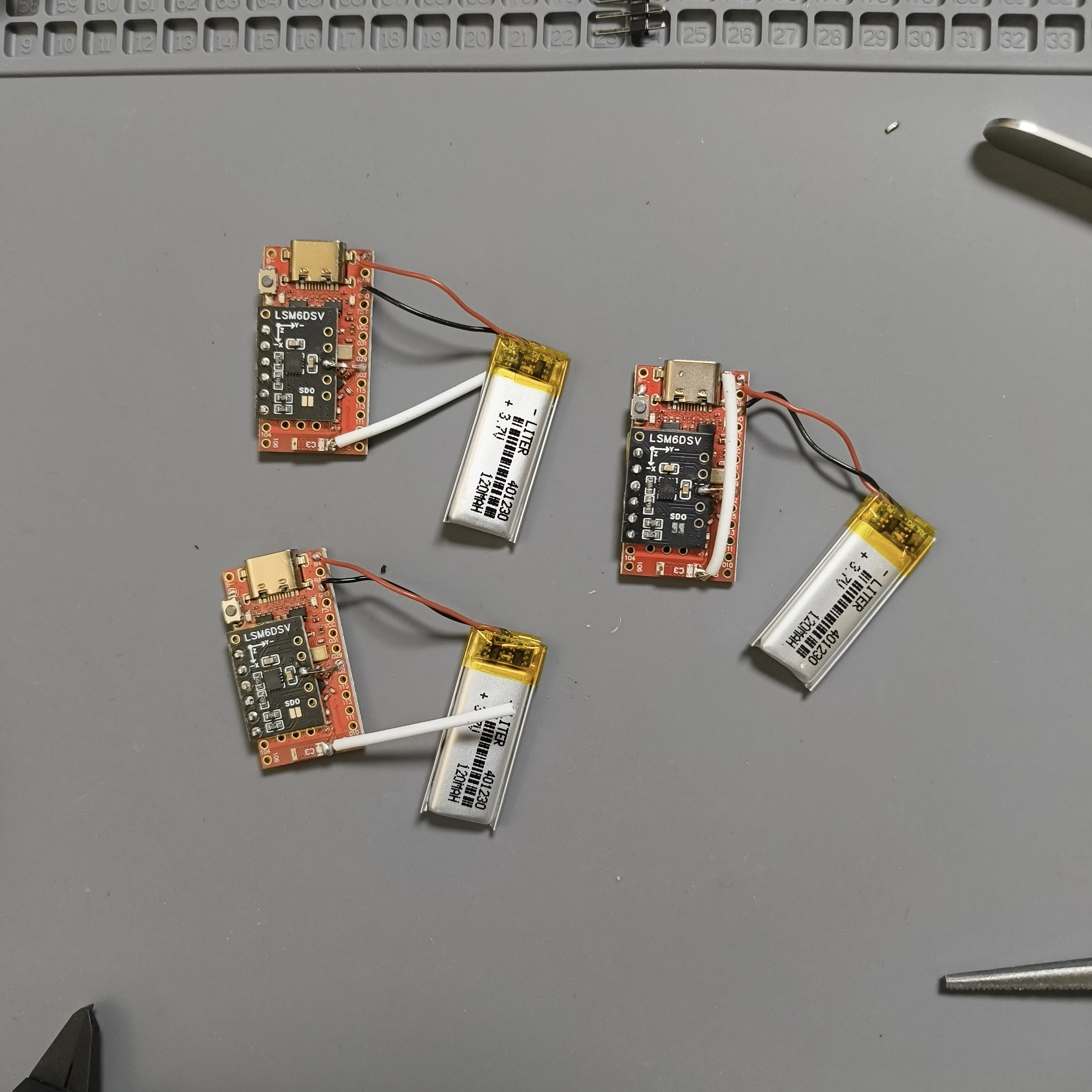
2. トラッカーの組み立て(LSM6DSVの場合)
基本的なコンポーネントの準備からトラッカーの作成手順は、Ibis Trackersの公式チュートリアルに準拠します。
ただし、IMUにLSM6DSVを使用する場合は、基板の載せ方と配線方法(特に右側のピン)に違いがあるため注意が必要です。
Smol公式のハードウェアページでは、推奨IMUとして ICM-45686 / LSM6DSV / LSM6DSR が並んでいます(参考: IMUの比較記事)。
各IMUの回路図はSmol Tracker Hardware Docsから確認できます。
ピンの位置合わせと左側の配線
位置合わせの基準として、IMU基板の上側のピンが ProMicro の 017 に来る位置を基準にすると分かりやすいです。
対応関係は上から順に以下のようになります。
-
017→ 3V3 -
020→ GND -
022→ SCL -
024→ SDA -
100→ CS -
011→ SDO
LSM6DSV基板は、載せる位置が少しでも左に寄るとケースの内壁と干渉してしまいます。左側6本をはんだ付けする前に、必ずケースに仮置きして入るかどうかを確認してください。
右側の配線(重要:1本だけ接続する)
ICM-45686では構成によって右側が2本になる説明がありますが、**LSM6DSVでは基本的に右側は 002 ピンからの1本のみ(INT1用)**を接続します。
ICM-45686用の説明をそのまま読んで、右側に余分な線を追加しないように注意してください。


ケースの用意
ご自宅に3Dプリンターがある方は、以下のリンクからSTLデータをダウンロードして印刷してください。
Reversed Ibis Tracker Case.stl (GitHub)
3. ファームウェアの書き換え
3.1. ファームウェアの準備
-
トラッカー側:
SlimeNRF_Tracker_NoSleep_SPI_StackedSmol.uf2系 -
レシーバー側: Holyiot-21017 用の
.hexファイル
ファイルはSmol Pre-Compiled Firmware Linksから取得します。
なお、Googleドライブなどの同期フォルダに保存していると書き換え時に予期せぬエラーが出ることがあるため、C:\ 直下などのローカル領域に保存することをおすすめします。
3.2. レシーバーの書き換え
レシーバー(Holyiot-21017)は、ドラッグ&ドロップではなく専用ツールを使います。
- nRF Connect for Desktop をダウンロードし、Programmerを開きます。
- Holyiotに付属のマグネットをLED付近に近づけ、DFUモード(赤LEDがゆっくり明滅)に入れます。
- ProgrammerでHolyiot用の
.hexファイルを選択し、Writeを実行します。
※レシーバーにはBootloaderを先に入れる手順は不要です。
3.3. トラッカーの書き換え(Bootloaderの更新を忘れずに)
公式ドキュメントにある通り、ProMicro / XIAO はファームウェアより前にBootloaderを更新しないと文鎮化(brick)の危険があります。
- デバイスをPCに繋ぎ、リセットボタンを2回(既にファーム導入済みの場合は4回)押してストレージとしてマウントさせます。(LEDがフェードしている場合は既にDFUモードです)
- まず Bootloaderの
.uf2をコピーして貼り付けます。 - デバイスが再起動して再度マウントされたら、次に トラッカー用ファームウェアの
.uf2を貼り付けます。ウィンドウが閉じて再起動すれば成功です。
3.4. 動作確認とペアリング
ファームウェアを書き込んだ直後は、すぐにSlimeVR Serverを開くのではなく、シリアルターミナルを開いて info コマンドを打ちます。
SlimeVR SlimeNRF Tracker ProMicro
Board: promicro_uf2
Target: promicro_uf2/nrf52840/spi
IMU: LSM6DSV
Interface: SPI
Address: 0x008F
このようにIMUやSPIが正しく認識されていれば、ハードウェア周り(MCU・ファームウェア・IMU・SPI配線)は問題ありません。
その後、以下の手順でペアリングを行います。
- トラッカー側で
infoを打ち、Device Addressを控える。 - レシーバー側で
add <Device Address>を打つ。 - 返ってきた Pairing ID をトラッカー側で
set <Pairing ID>と打つ。 - トラッカー側で
Pairedと出れば完了。
4. トラブルシューティング:「Status 26」と通信エラー
追加でトラッカーを製作し、合計4台で接続テストを行った際、ペアリングは成功しているのに通信が全く安定しないという壁にぶつかりました。
発生した症状
シリアルコンソールに以下のエラーが頻発します。
Status: 26Connection error-
Abnormal rot/Reset rotation
Status: 26 とは、ステータスコードの合算(2 = CONNECTION_ERROR + 8 = USB_CONNECTED + 16 = PLUGGED)であり、「USB接続中だが通信エラーを抱えている状態」を示しています。
最初ははんだ付け不良などの個体差を疑いましたが、4台全てで共通して発生したため、ハードウェアの故障ではなく、ファームウェアや通信処理の不具合を疑うことにしました。
原因の特定と解決策:特定ビルドへのダウングレード
調査の結果、SlimeVR公式GitHubの Issue #134(stacked smol が最新ファームウェアで receiver と通信できず status 26 を出す問題)を発見しました。古いファームウェアではこの問題が発生しないとの報告がありました。
そこで、以下の手順で解決を図りました。
① 3月7日版へのダウングレード
SlimeNRF Firmware CI (Mar 7) から過去のビルドを取得し、トラッカーとレシーバーの両方のファームウェアを焼き直しました。
② 1台ずつの段階的な安定性検証
ダウングレード後、一気に複数台をONにするのではなく、**「まずは1台だけ電源をONにしてペアリングし、数分放置する」**という検証を行いました。
結果として、1台のみの稼働であれば通信エラーが出ず、Server上で安定して回転を認識しました。
この「安定して動く1台」を基準個体とし、2台目、3台目と順次追加しながら検証していくことで、複数台の同時運用においても問題なく動作することを確認できました。
5. SlimeVR Serverの導入
ハードウェア側が安定したら、最後に SlimeVR Initial Setup の手順に従ってPC側のセットアップを行います。
【導入のポイント】
ここでも、自作トラッカーを一気に全部つなぐのではなく、1台ずつトラッカーを起動してBody part(割り当て)とMounting(マウント方向)を設定するとうまくいきやすいです。手動で確実に向きを合わせていくことで、VRChat内でのトラッキング精度が格段に向上します。
おわりに

10個すべてのトラッカー(10点フルトラ)が完成しました!
この記事が、同じように自作トラッカーで躓いている方や、これからIbis V1での自作フルトラに挑戦しようとしている方の道しるべになれば幸いです。
皆さんも、ぜひ快適な自作フルトラライフを楽しんでください!