IS3 マイクロコンピュータ基礎 HDL実習
6章 状態機械の設計
前章までで、レジスタの設計方法と組み合わせ回路の設計方法、さらにそれらの回路モジュールを組み合わせて新しい回路を設計する方法を学んできました。
レジスタと組み合わせ回路とを組み合わせることで、状態機械を設計することができます。
本章では、状態機械の設計方法を学びます。
回路仕様
状態機械 my_stm として、図6.1に示す、1-bit 入力 p、クロック入力 clock、アクティブローの非同期リセット信号 n_reset、2-bit 出力 y[1:0] を持つ回路を考えましょう。
この状態機械 my_stm の状態遷移は図6.2で与えられるものとします。
4つの状態(SA, SB, SC, SD)を持ち、出力 y が状態だけで決まるような Moore 型の状態機械です。
状態遷移はclockの立ち上がりのタイミングで起こるとします。
ただし、アクティブローの非同期リセット信号 n_reset が 0 になると直ちに(clockの立ち上がりを待たずに)状態がSAにリセットされます。
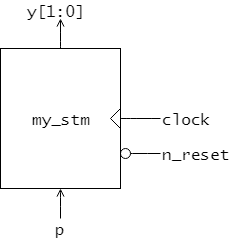
<図6.1 状態機械 my_stm>
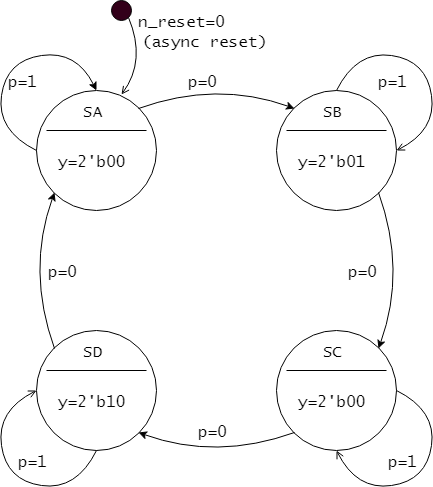
<図6.2 my_stm の状態遷移図>
回路構成
状態機械 my_stm のような Moore 型の状態機械は、図6.3のように3つの回路モジュールを組み合わせて構成することができます。
1つ目は現在どの状態にあるかを記憶するための状態レジスタである register モジュール、2つ目は現在の状態と入力から次の状態を生成する次状態関数回路の next_state_generator モジュール、そして3目は現在の状態をもとに出力信号を生成する出力関数回路の output_decoder モジュールです。
これらのモジュールのうち、 next_state_generator と output_decoder は組み合わせ論理回路です。
以下ではまず、3つのモジュールそれぞれについてどのように設計するかを見ていきます。
その後、それらのモジュールを図6.3のように組み合わせ my_stm モジュールを構成していきます。
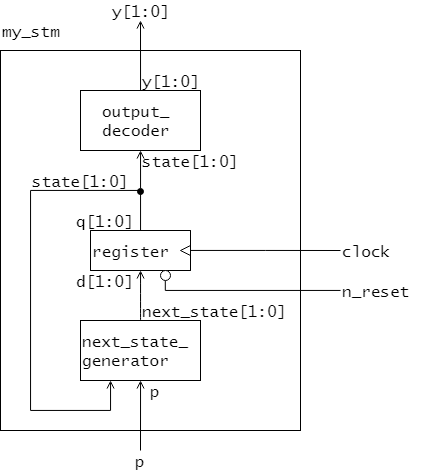
<図6.3 my_stm の内部構成>
状態レジスタ
状態機械 my_stm は4つの状態を持ちます。
これらの状態を表6.1のように2ビットで符号化することにしましょう。
<表6.1 状態の符号化>
| 状態 | 符号 state[1:0] |
|---|---|
| SA | 00 |
| SB | 01 |
| SC | 10 |
| SD | 11 |
2ビットのレジスタを用意し、レジスタに符号化された信号を保持することで、現在どの状態にあるかを表すことができます。
このレジスタを状態レジスタと呼びましょう。
状態レジスタはリスト6.1のように非同期リセット付き2ビットレジスタとして設計できます。
なお、回路の仕様(図6.3)より、アクティブローの非同期リセット n_reset が入ると状態は SA にリセットされるので、リスト6.1においても n_reset が0になったタイミングで出力 q[1:0] が状態 SA に相当する符号 00 にリセットされていることに注意してください。
<リスト6.1 register モジュール(非同期リセット付き2ビットレジスタ)>
module register ( // 非同期リセット付き2ビットレジスタ
input logic clock,
input logic n_reset, // active low async reset
input logic [1:0] d,
output logic [1:0] q
);
always_ff @ (posedge clock, negedge n_reset) begin
if (n_reset == 1'b0) begin
q <= 2'b00; // SA にリセット
end else begin
q <= d;
end
end
endmodule
次状態関数回路
図6.2の状態遷移図をもとに、今の状態と次の状態の関係を表にまとめると、表6.2の状態遷移表が得られます。
<表6.2 my_stm の状態遷移表>
| p | 今の状態 | 次の状態 |
|---|---|---|
| 0 | SA | SB |
| 0 | SB | SC |
| 0 | SC | SD |
| 0 | SD | SA |
| 1 | SA | SA |
| 1 | SB | SB |
| 1 | SC | SC |
| 1 | SD | SD |
表6.2の状態遷移表に現れる状態を、表6.1によって符号に置き換えることで、次状態関数回路 next_state_generator モジュールの真理値表が得られます(表6.3)。
<表6.3 次状態関数回路 next_state_generatorの真理値表>
| 入力 p | 入力 state[1:0] | 出力 next_state[1:0] |
|---|---|---|
| 0 | 00 | 01 |
| 0 | 01 | 10 |
| 0 | 10 | 11 |
| 0 | 11 | 00 |
| 1 | 00 | 00 |
| 1 | 01 | 01 |
| 1 | 10 | 10 |
| 1 | 11 | 11 |
表6.3の真理値表をもとにして、 next_state_generator モジュールはリスト6.2のように記述できます。
<リスト6.2 next_state_generator モジュール(次状態関数回路)>
module next_state_generator (
input logic [1:0] state,
input logic p,
output logic [1:0] next_state
);
always_comb begin
case ({p, state})
3'b0_00: next_state = 2'b01;
3'b0_01: next_state = 2'b10;
3'b0_10: next_state = 2'b11;
3'b0_11: next_state = 2'b00;
3'b1_00: next_state = 2'b00;
3'b1_01: next_state = 2'b01;
3'b1_10: next_state = 2'b10;
3'b1_11: next_state = 2'b11;
default: next_state = 2'b00;
endcase
end
endmodule //
出力関数回路
図6.2の状態遷移図をもとに、今の状態と出力の関係を表にまとめると、表6.4が得られます。
<表6.4 状態と出力の対応表>
| 今の状態 | 出力 y[1:0] |
|---|---|
| SA | 00 |
| SB | 01 |
| SC | 00 |
| SD | 10 |
先ほどと同様に、状態を符号に置き換えることで、表6.5のように出力関数回路 output_decoder の真理値表が得られます。
<表6.5 出力関数回路 output_decoder の真理値表>
| 入力 state[1:0] | 出力 y[1:0] |
|---|---|
| 00 | 00 |
| 01 | 01 |
| 10 | 00 |
| 11 | 10 |
表6.5より output_decoder モジュールはリスト6.3のように記述できます。
<リスト6.3 output_decoder モジュール(出力関数回路)>
module output_decoder (
input logic [1:0] state,
output logic [1:0] y
);
always_comb begin
case (state)
2'b00 : y = 2'b00;
2'b01 : y = 2'b01;
2'b10 : y = 2'b00;
2'b11 : y = 2'b10;
default : y = 2'b00;
endcase
end
endmodule //
状態機械の組み上げ
以上で、状態レジスタ register モジュール、次状態関数回路 next_state_generator モジュール、出力関数回路 output_decoder が設計できました。
最後にこれらの各モジュールを図6.3のように接続することで、状態機械 my_stm を作ることができます。
my_stm モジュールの設計例をリスト6.4に示します。
<リスト6.4 my_stm モジュール>
module my_stm (
input logic clock,
input logic n_reset,
input logic p,
output logic [1:0] y
);
logic [1:0] state; // 今の状態
logic [1:0] next_state; // 次の状態
// 状態レジスタ
register state_register(
.clock (clock),
.n_reset (n_reset),
.d (next_state),
.q (state)
);
// 次状態関数
next_state_generator next_state_generator(
.p (p),
.state (state),
.next_state (next_state)
);
// 出力関数
output_decoder output_decoder(
.state (state),
.y (y)
);
endmodule //
演習
リスト6.4 my_stm モジュールを実習ボード DE0-CV に実装してその動作を確認しましょう。
my_stm モジュールの入出力信号は表5.6のように DE0-CV の入出力デバイスに割り当ててください。
なお、リスト6.1 register モジュール、リスト6.2 next_state_generator モジュール、およびリスト6.3 output_decoder モジュールも必要となりますので、プロジェクトにそれらのデザインファイルも追加しましょう。
<表6.6 my_stm モジュールの入出力のデバイスへの割り当て>
| 信号名 | 割り当てデバイス | 入出力 |
|---|---|---|
| clock | KEY0 | input |
| n_reset | KEY1 | input |
| p | SW0 | input |
| y[1:0] | LEDR1-LEDR0 | output |