#Day1
入力層ー中間層
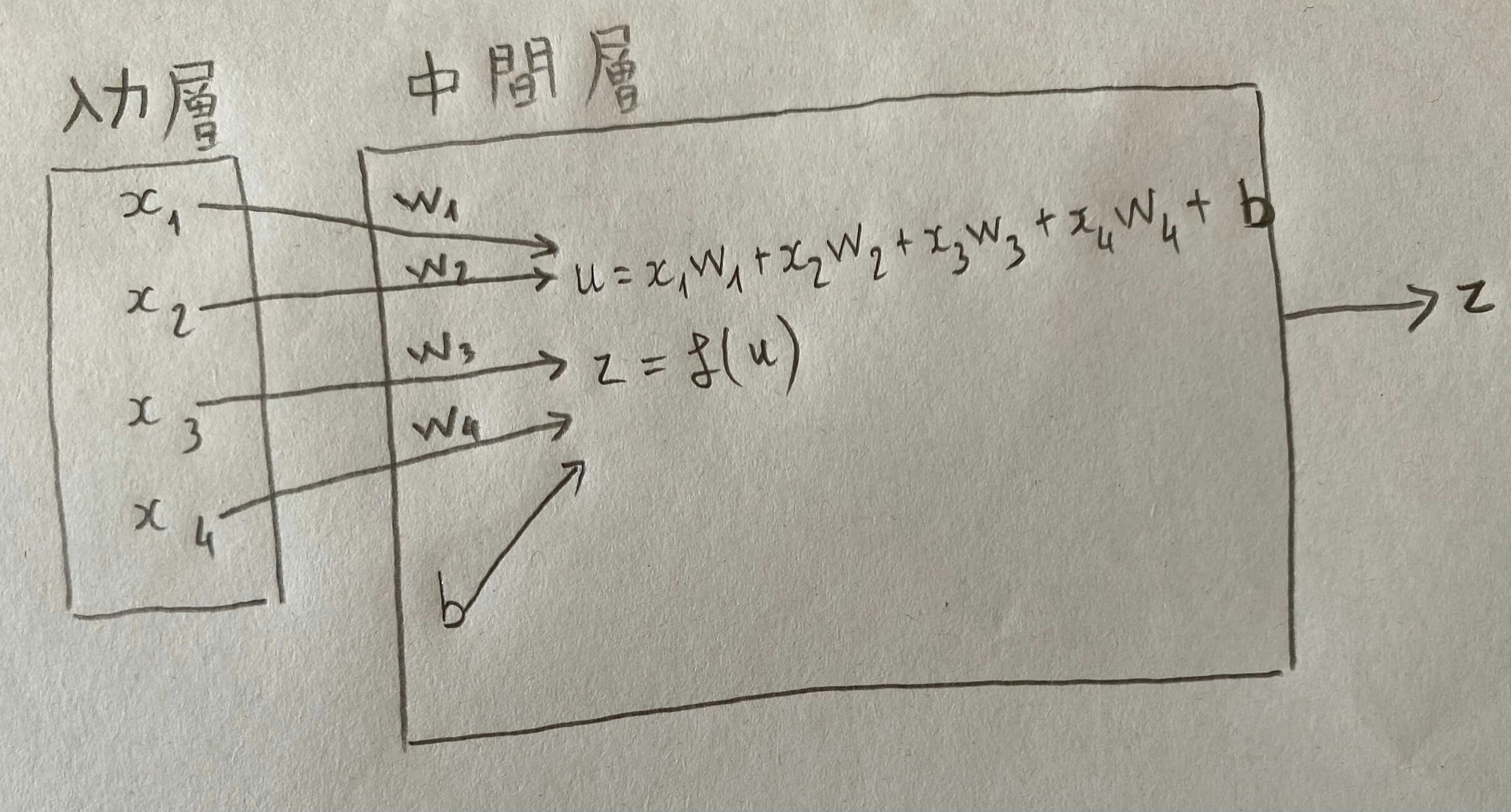
x_i:入力\\
w_i:重み\\
b:バイアス\\
f:活性化関数\\
z:出力\\
配列式
\boldsymbol{W} = \begin{pmatrix} w_{1} \\ w_{2} \\ \vdots \\ w_{n} \end{pmatrix} \qquad \boldsymbol{x} = \begin{pmatrix} x_{1} \\ x_{2} \\ \vdots \\ x_{n} \end{pmatrix}\\
u = w_{1}x_{1} + w_{2}x_{2} +\dots + w_{n}x_{n} + b\\
u = \boldsymbol{W}\boldsymbol{x} + b
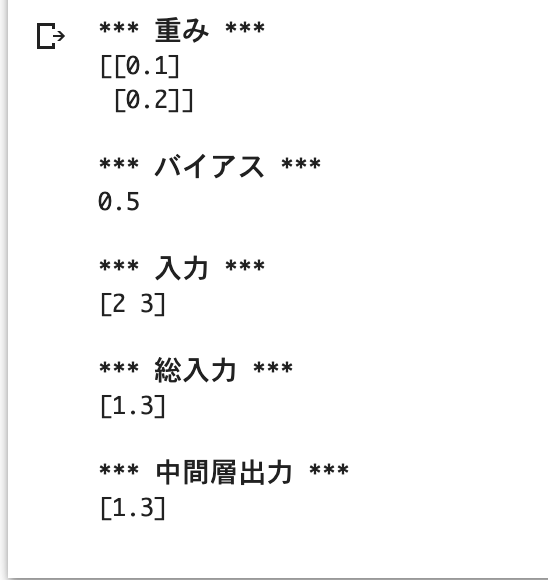
コード
W = np.array([[0.1], [0.2]])
b = 0.5
x = np.array([2, 3])
u = np.dot(x, W) + b
z = functions.relu(u)
考察
重回帰分析と似ている。
異なるのが、活性化関数の導入
活性化関数
次の層への出力の大きさ・信号ON/OFFを決める非線形関数(関数の図が直線でない)
使い分け
中間層用
- ReLU関数(主流)
- Sigmoidシグモイド関数
- Step ステップ関数
出力層用
- Softmaxソフトマックス関数(クラス分類2つ以上の場合)
- Sigmoidシグモイド関数
- 恒等写像関数(f(x) = x)
Step ステップ関数
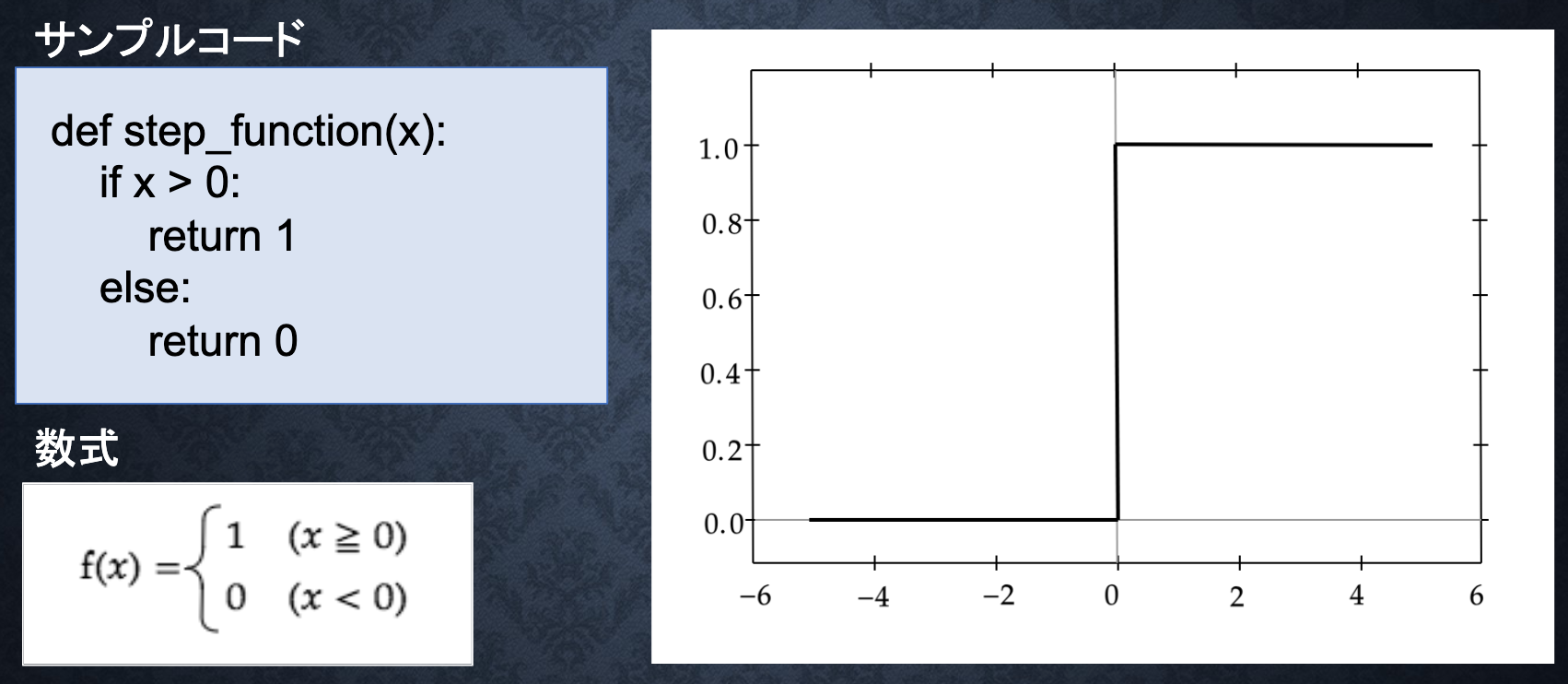
パーセプトロンで利用される関数
課題:0〜1表現できず、線形分離可能なものしか学習できない
Sigmoidシグモイド関数
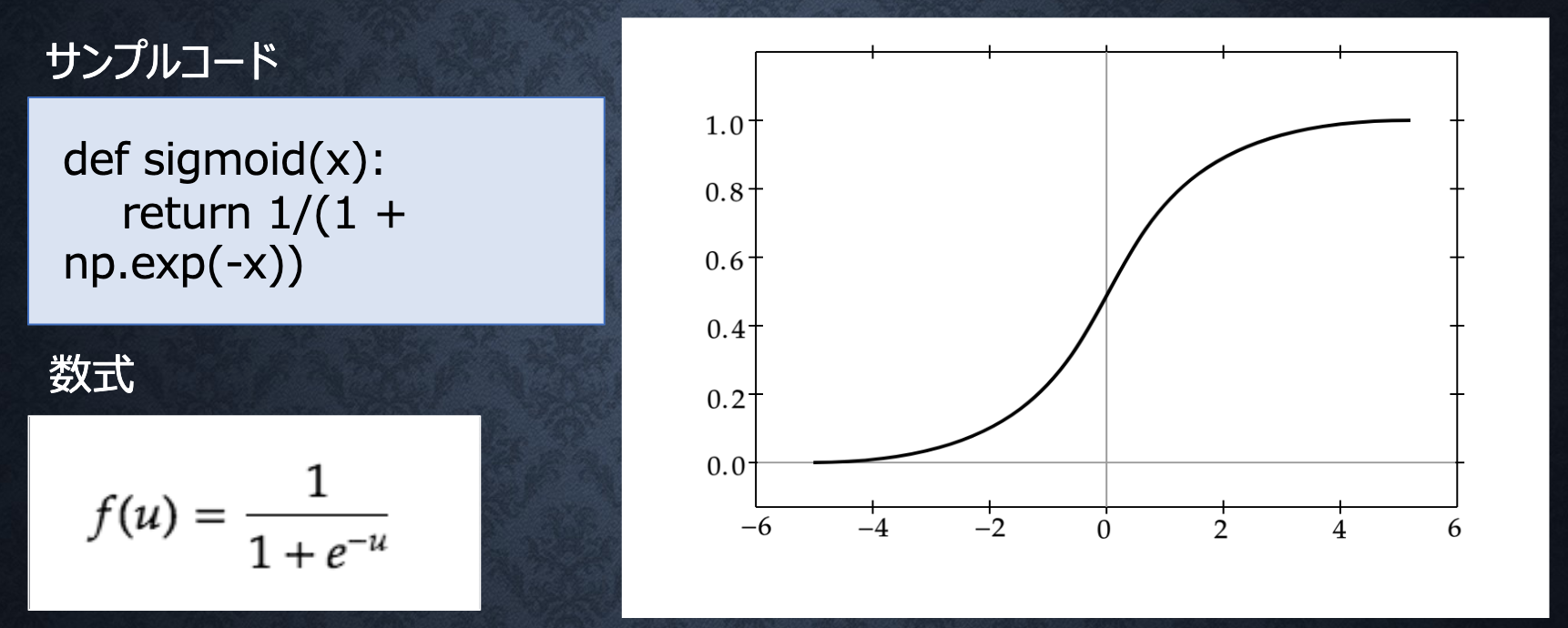
ON/OFFしかできないステップ関数に対し、信号の強弱を調整できる関数
課題:大きな値では出力が微小のため、勾配消失問題が落ちやすい
ReLU関数
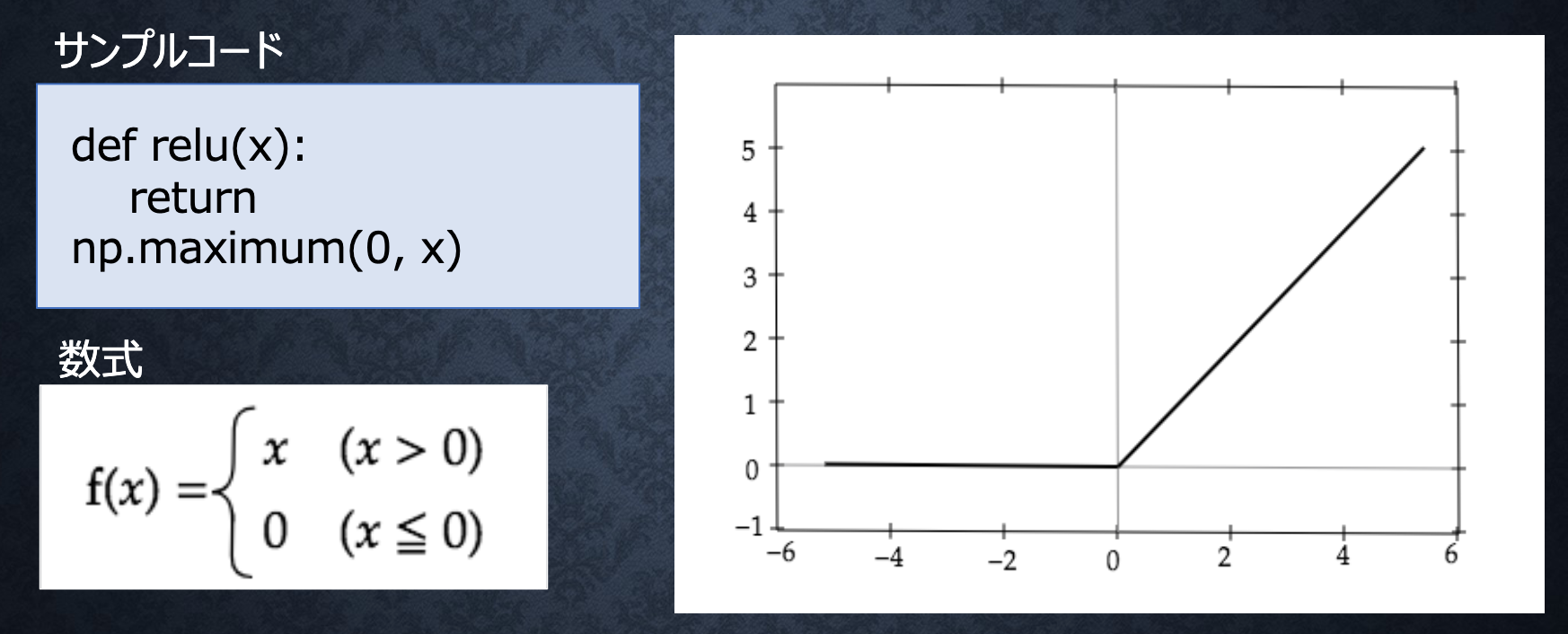
勾配消失問題を回避、スパース化(影響が少ない重みを0に)を貢献
Softmaxソフトマックス関数
コード
def softmax(x):
if x.ndim == 2:
x = x.T
x = x - np.max(x, axis=0)
y = np.exp(x) / np.sum(np.exp(x), axis=0)
return y.T
x = x - np.max(x) # オーバーフロー対策
return np.exp(x) / np.sum(np.exp(x))
出力層
誤差関数
出力層のアウトプット(d)とラベル(y)の間、どのぐらい差があるか計算する関数
####二乗誤差

※1/2あるのは、微分する際、綺麗な結果になるため
※二乗にするのは、マイナス距離を排除するため
コード
def mean_squared_error(d, y):
return np.mean(np.square(d - y)) / 2
####交差エントロピー
コード
def cross_entropy_error(d, y):
if y.ndim == 1:
d = d.reshape(1, d.size)
y = y.reshape(1, y.size)
# 教師データがone-hot-vectorの場合、正解ラベルのインデックスに変換
if d.size == y.size:
d = d.argmax(axis=1)
batch_size = y.shape[0]
return -np.sum(np.log(y[np.arange(batch_size), d] + 1e-7)) / batch_size
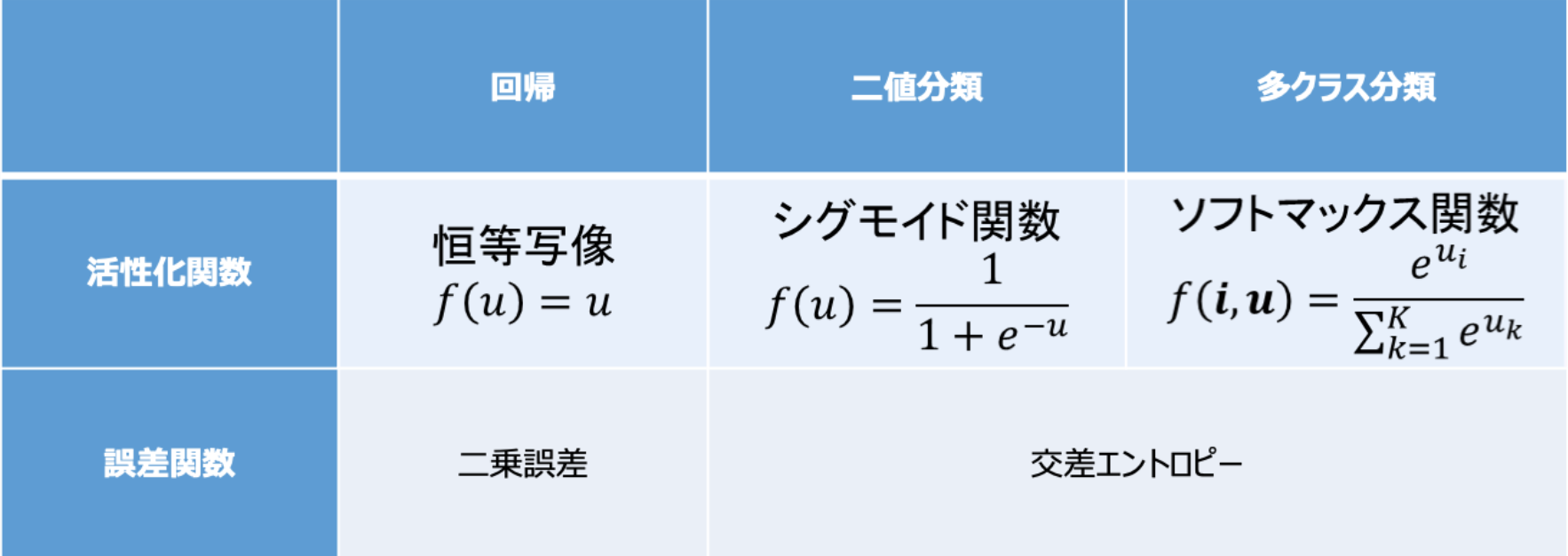
出力層の活性化関数
中間層と出力層の違い
- 中間層:しきい値の前後で信号の強弱を調整
- 出力層:信号の大きさをそのままに変更したり、0〜1を限定し、総和を1にしたりする
活性化関数+誤差関数
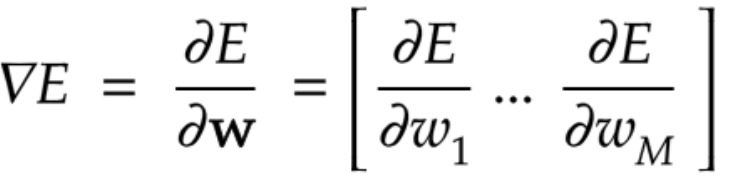
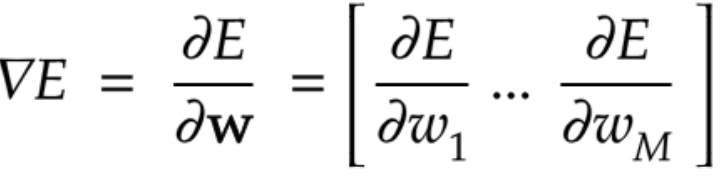
勾配降下法
深層学習の目的
学習を通して、誤差を最小にするネットワックを作る
いわば、誤差関数E(W)を最小化するパラメータWを探すこと
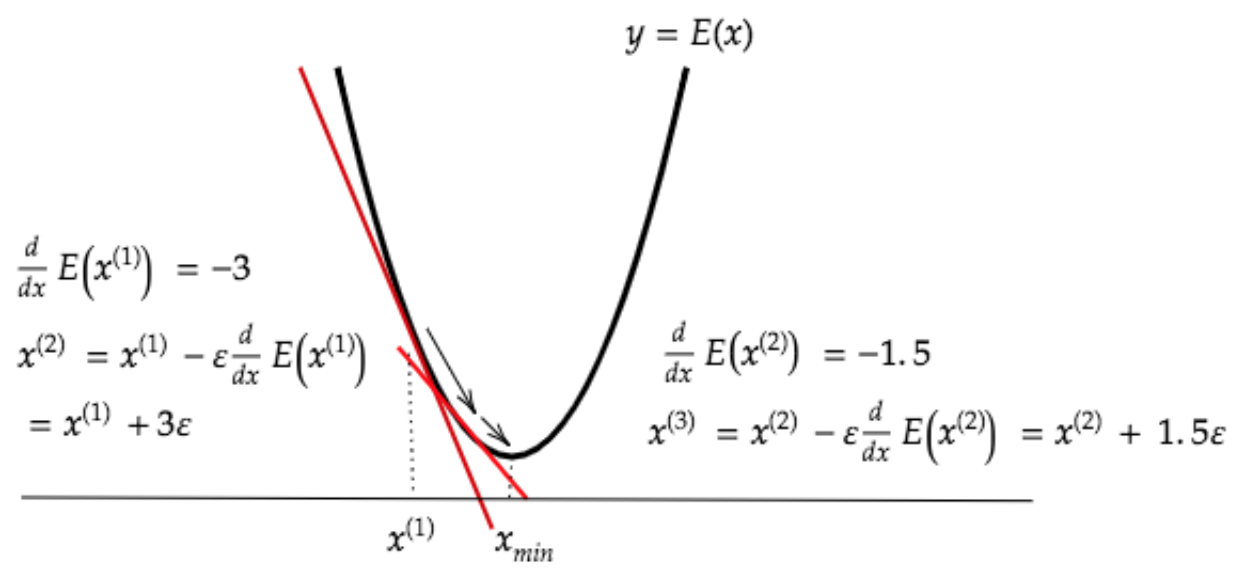
勾配降下法

{\epsilon}学習率
学習率が大きすぎる
最小値にいつまでも、たどり着かず、発散してしまう
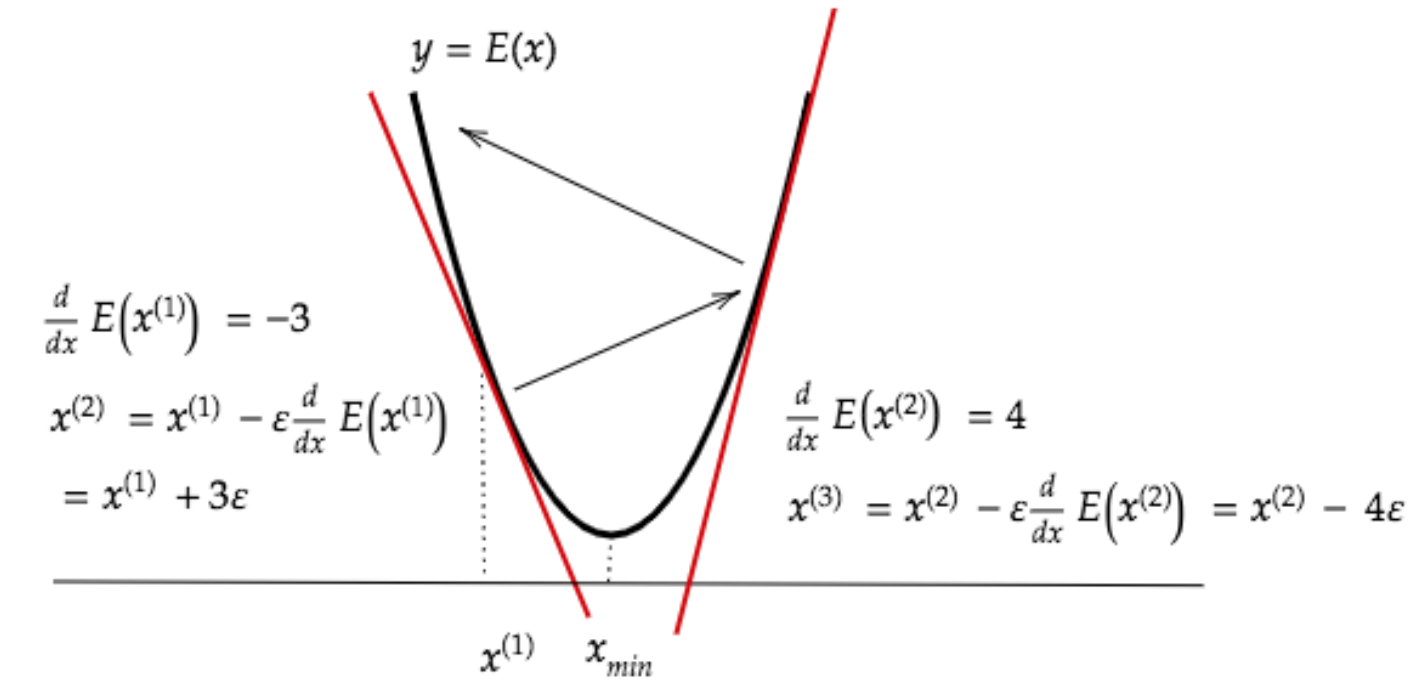
学習率が小さすぎる
学習する時間がかかる
学習率の決定、収束性向上のためのアルゴリズム
- Momentum
- AdaGrad
- AdaDelta
- Adam
確率的勾配降下法

データ全体の誤差の代わり、ランダムに抽出したデータの誤差で計算する
以下のメリットがある
- 計算コストを軽減
- オンライ学習できる
- 局所的な最小値に収束するリスクを軽減
※オンライ学習:データ全体代わりに、随時、個別のデータを学習する
ミニバッチ勾配降下法
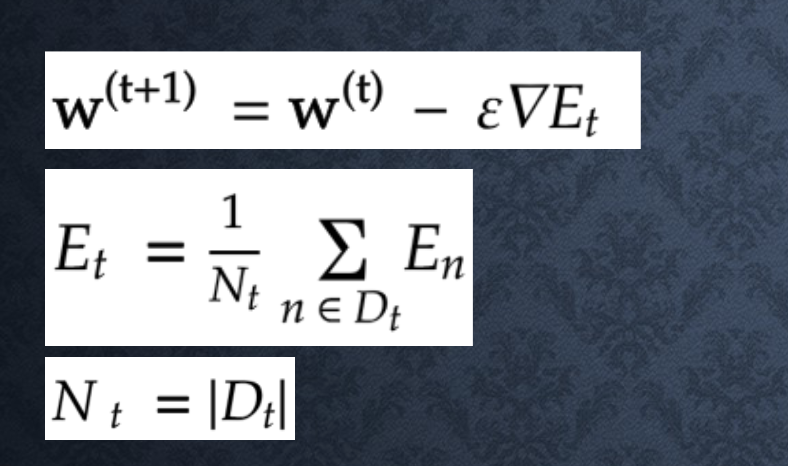
ランダムに分割したデータの集合(ミニバッチ)Dtに属するサンプルの平均誤差で計算する
並列計算を活用できるため、計算資源(CPU,GPU)を有効利用できる
数値微分

微小な数値を生成し擬似的に微分を計算する手法
どんな複雑な関数でも計算できる、
反面、各パラメータをそれぞれE(w+h)とE(w-h)を計算しないといけないため、
計算コストが高いすぎる
しかし、誤差逆伝播の結果を検証するのによく使われている
def numerical_gradient(f, x):
h = 1e-4
grad = np.zeros_like(x)
for idx in range(x.size):
tmp_val = x[idx]
# f(x + h)の計算
x[idx] = tmp_val + h
fxh1 = f(x)
# f(x - h)の計算
x[idx] = tmp_val - h
fxh2 = f(x)
grad[idx] = (fxh1 - fxh2) / (2 * h)
# 値を元に戻す
x[idx] = tmp_val
return grad
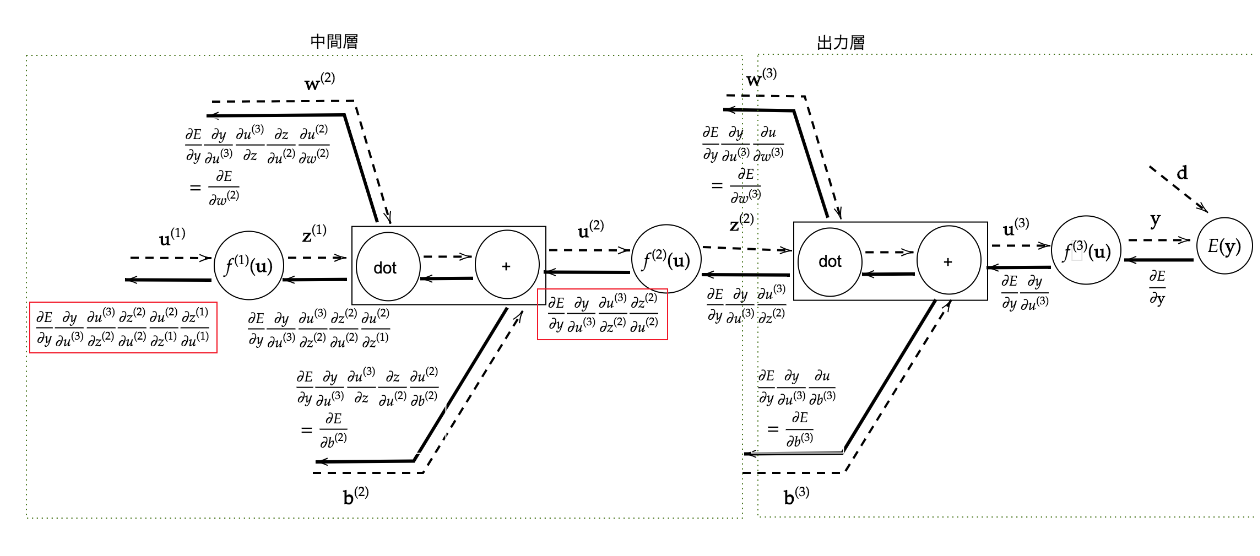
誤差逆伝播法
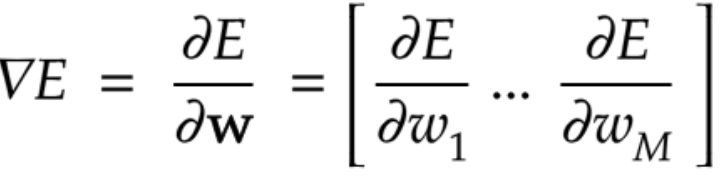
を計算するため、
算出された誤差を、出力層側から順に微分し、前の層へ、前の層へ伝播する
最小限の計算で各パラメータでの微分値を解析的に計算する手法
実装
初期設定
def init_network():
# print("##### ネットワークの初期化 #####")
network = {}
nodesNum = 10
network['W1'] = np.random.randn(2, nodesNum)
network['W2'] = np.random.randn(nodesNum)
network['b1'] = np.random.randn(nodesNum)
network['b2'] = np.random.randn()
return network
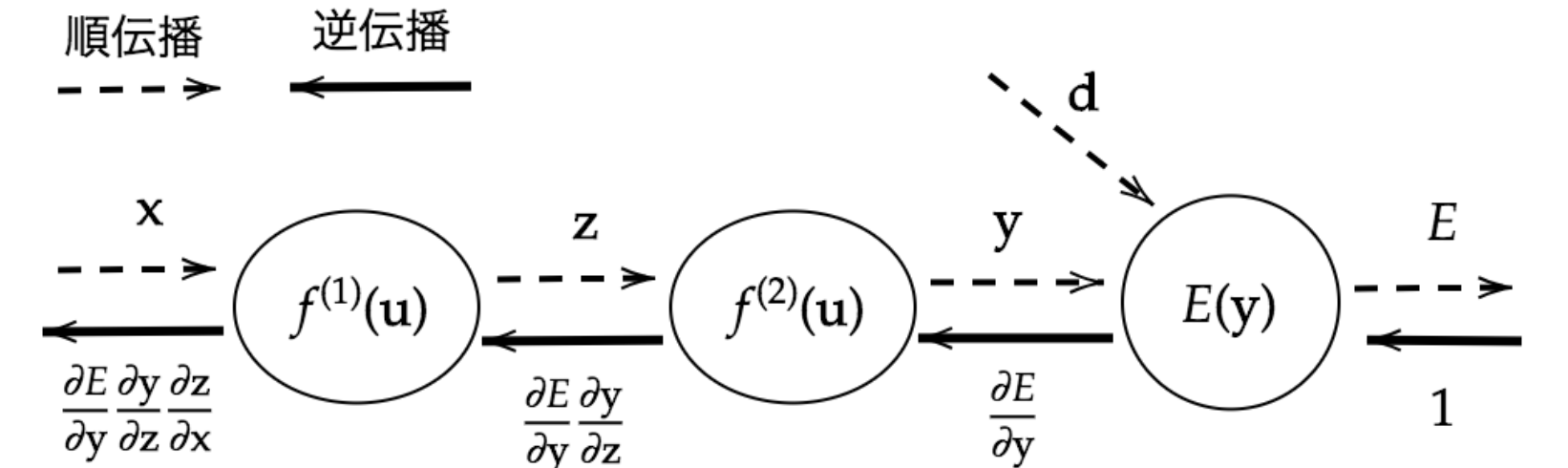
順伝播
def forward(network, x):
# print("##### 順伝播開始 #####")
W1, W2 = network['W1'], network['W2']
b1, b2 = network['b1'], network['b2']
u1 = np.dot(x, W1) + b1
z1 = functions.relu(u1)
u2 = np.dot(z1, W2) + b2
y = u2
return z1, y
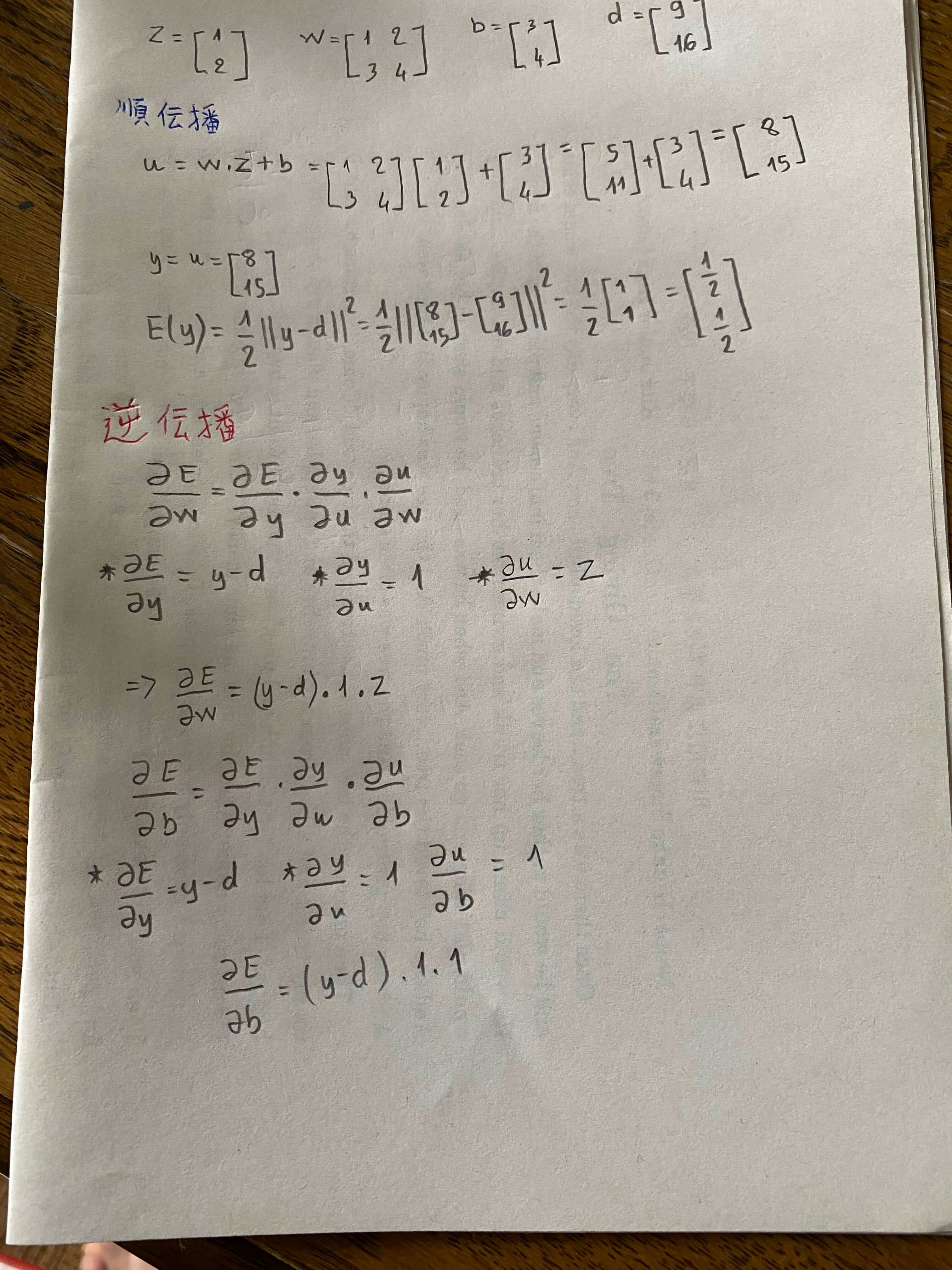
逆伝播
# print("\n##### 誤差逆伝播開始 #####")
grad = {}
W1, W2 = network['W1'], network['W2']
b1, b2 = network['b1'], network['b2']
# 出力層でのデルタ
delta2 = functions.d_mean_squared_error(d, y)
# b2の勾配
grad['b2'] = np.sum(delta2, axis=0)
# W2の勾配
grad['W2'] = np.dot(z1.T, delta2)
# 中間層でのデルタ
delta1 = np.dot(delta2, W2.T) * functions.d_relu(z1)
delta1 = delta1[np.newaxis, :]
# b1の勾配
grad['b1'] = np.sum(delta1, axis=0)
x = x[np.newaxis, :]
# W1の勾配
grad['W1'] = np.dot(x.T, delta1)
return grad
b1、b2の計算について
because the network is designed to process examples in (mini-)batches, and you therefore have gradients calculated for more than one example at a time. The sum is squashing the results down to a single update. This would be easier to confirm if you also showed update code for weights.
学習
def f(x):
y = 3 * x[0] + 2 * x[1]
return y
# サンプルデータを作成
data_sets_size = 100000
data_sets = [0 for i in range(data_sets_size)]
for i in range(data_sets_size):
data_sets[i] = {}
# ランダムな値を設定
data_sets[i]['x'] = np.random.rand(2)
## 試してみよう_入力値の設定
# data_sets[i]['x'] = np.random.rand(2) * 10 -5 # -5〜5のランダム数値
# 目標出力を設定
data_sets[i]['d'] = f(data_sets[i]['x'])
losses = []
# 学習率
learning_rate = 0.07
# 抽出数
epoch = 1000
# パラメータの初期化
network = init_network()
# データのランダム抽出
random_datasets = np.random.choice(data_sets, epoch)
# 勾配降下の繰り返し
for dataset in random_datasets:
x, d = dataset['x'], dataset['d']
z1, y = forward(network, x)
grad = backward(x, d, z1, y)
# パラメータに勾配適用
for key in ('W1', 'W2', 'b1', 'b2'):
network[key] -= learning_rate * grad[key]
# 誤差
loss = functions.mean_squared_error(d, y)
losses.append(loss)
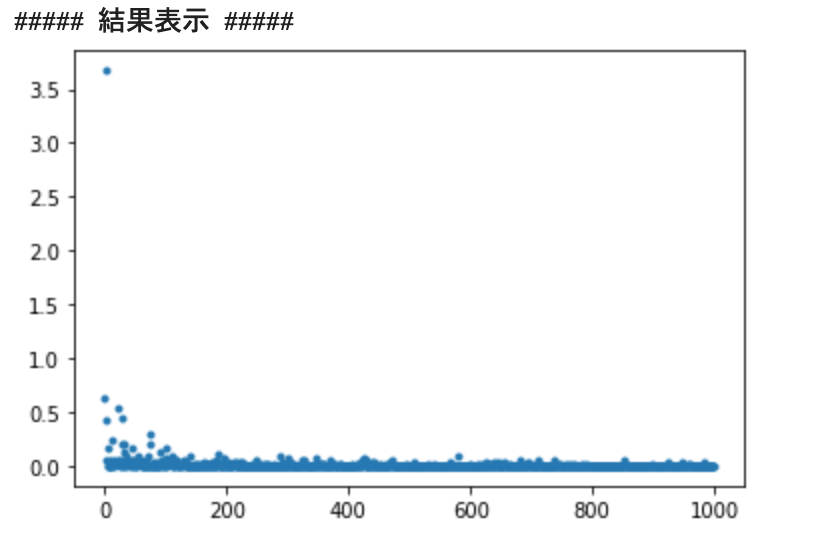
print("##### 結果表示 #####")
lists = range(epoch)
plt.plot(lists, losses, '.')
# グラフの表示
plt.show()
#Day2
勾配消失問題
層が重ねれば重ねるほど、勾配降下法を用いると、
下位層のパラメータを更新するための勾配が小さくなりすぎ、
やがて、下位層のパラメータが更新できなくる問題
シグモイド関数の問題
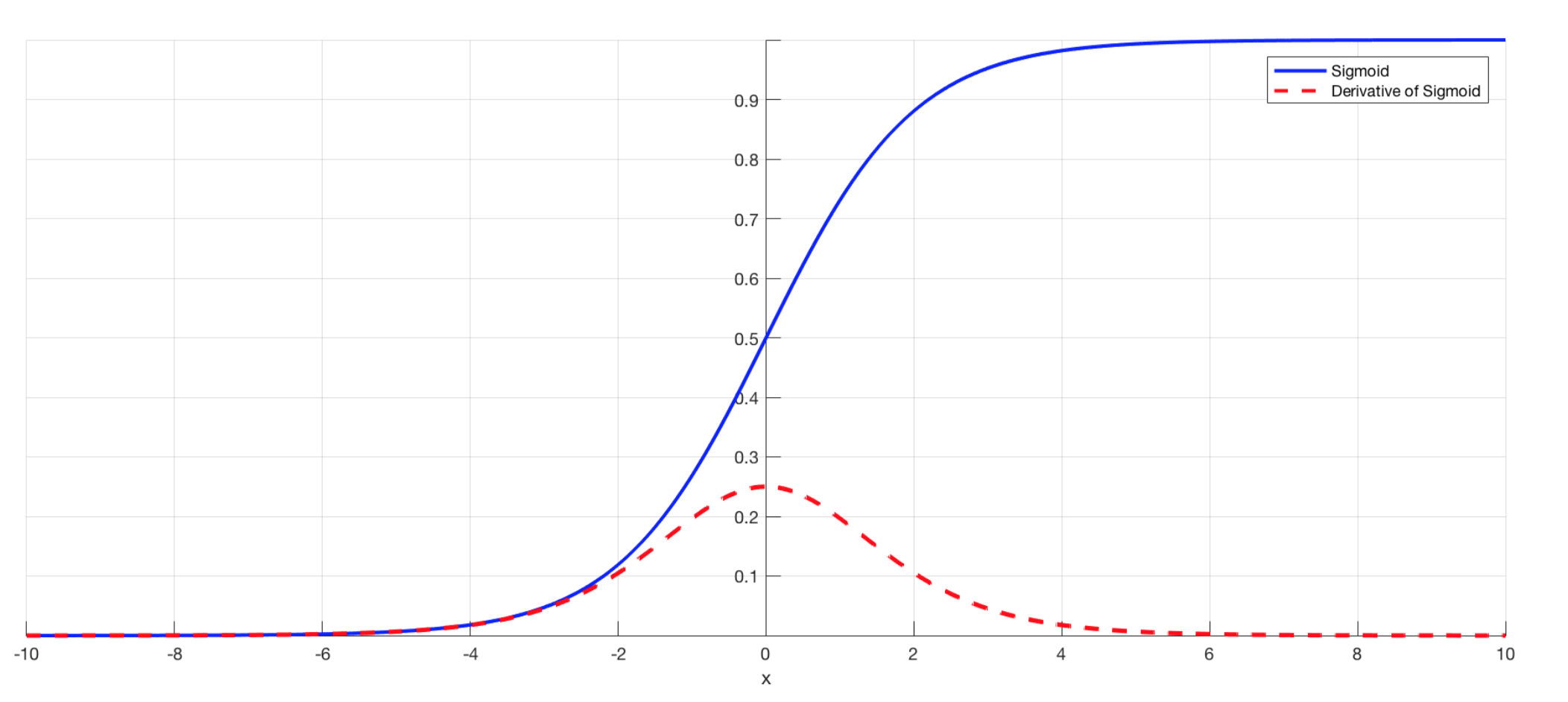
シグモイド関数を微分した最大値がたった0.25
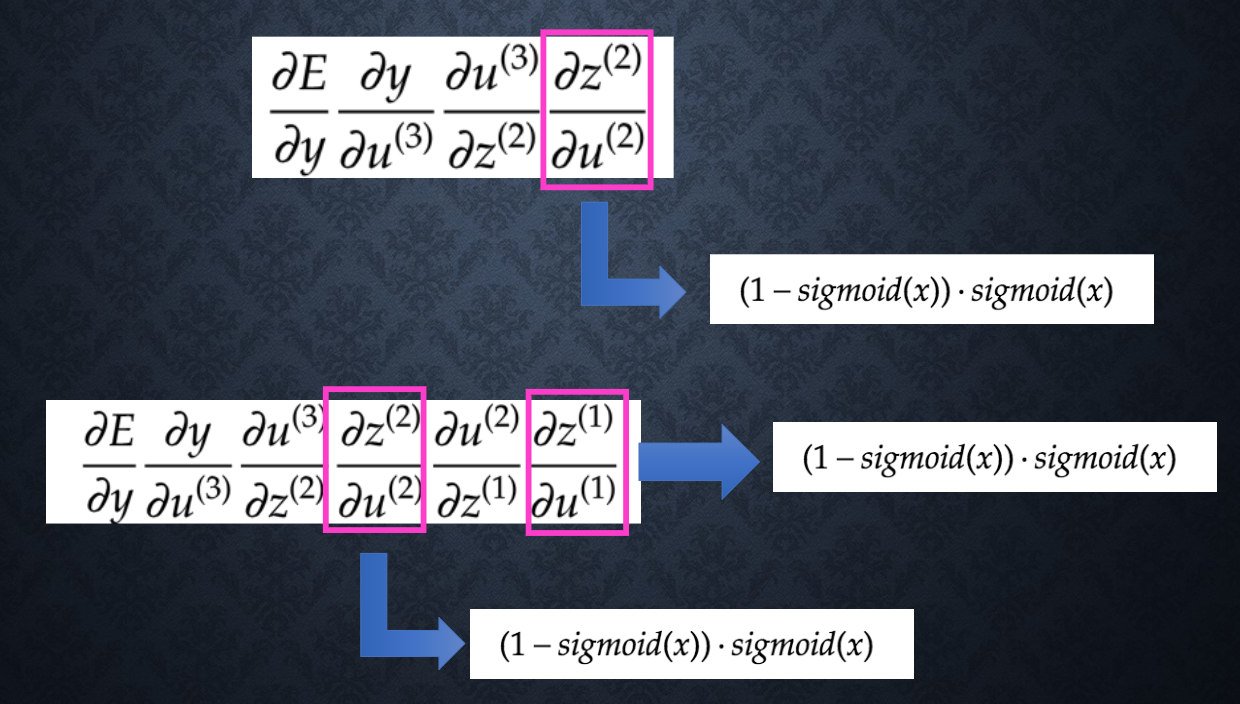
上記の式で勾配を計算すると何回も0.25を掛けたら、段々小さくなり、勾配消失が発生してしまう
勾配消失を解決する方法
活性化関数の選択
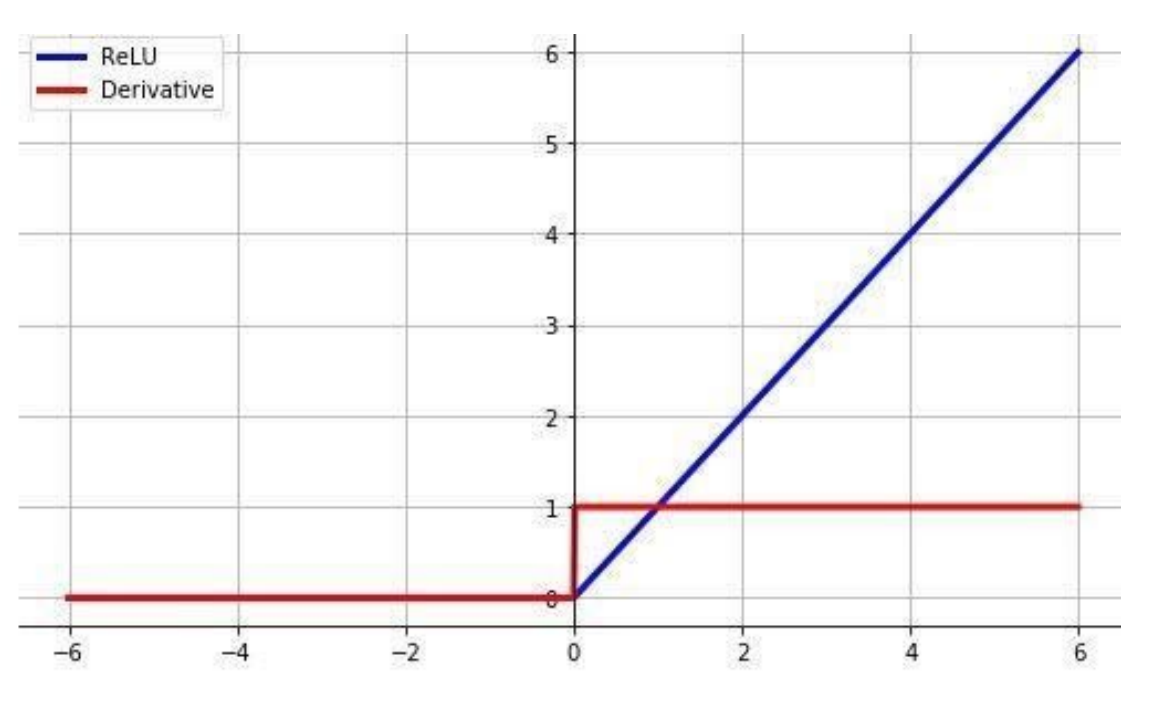
ReLU活性化関数の最大値が1で、最小値が0により、
勾配消失問題を抑止でき、スパース化に貢献できる
重みの初期値設定
y = w1x1 + w2x2 + ... + wNxN + b
重みw1,w2,...は普段、正規分布で初期化されているが、
yに対する活性関数の微分を大きすぎない(勾配爆発しない)、小さすぎない(勾配消失しない)ように、yの分散を重みの分散と近くように保つ手法。
Xavier
\frac{1}{\sqrt{n}}
network['W1'] = np.random.randn(input_layer_size, hidden_layer_1_size) / (np.sqrt(input_layer_size))
######利用する活性化関数
- ReLU
- Sigmoid
- Tanch(双曲線正接)
He
\frac{2}{\sqrt{n}}
network['W1'] = np.random.randn(input_layer_size, hidden_layer_1_size) / (np.sqrt(input_layer_size)) * np.sqrt(2)
######利用する活性化関数
- ReLU
考察
重みの初期値が0にすると、勾配消失が発生
1にすると、勾配爆発が発生
どの場合でも、うまく学習できない
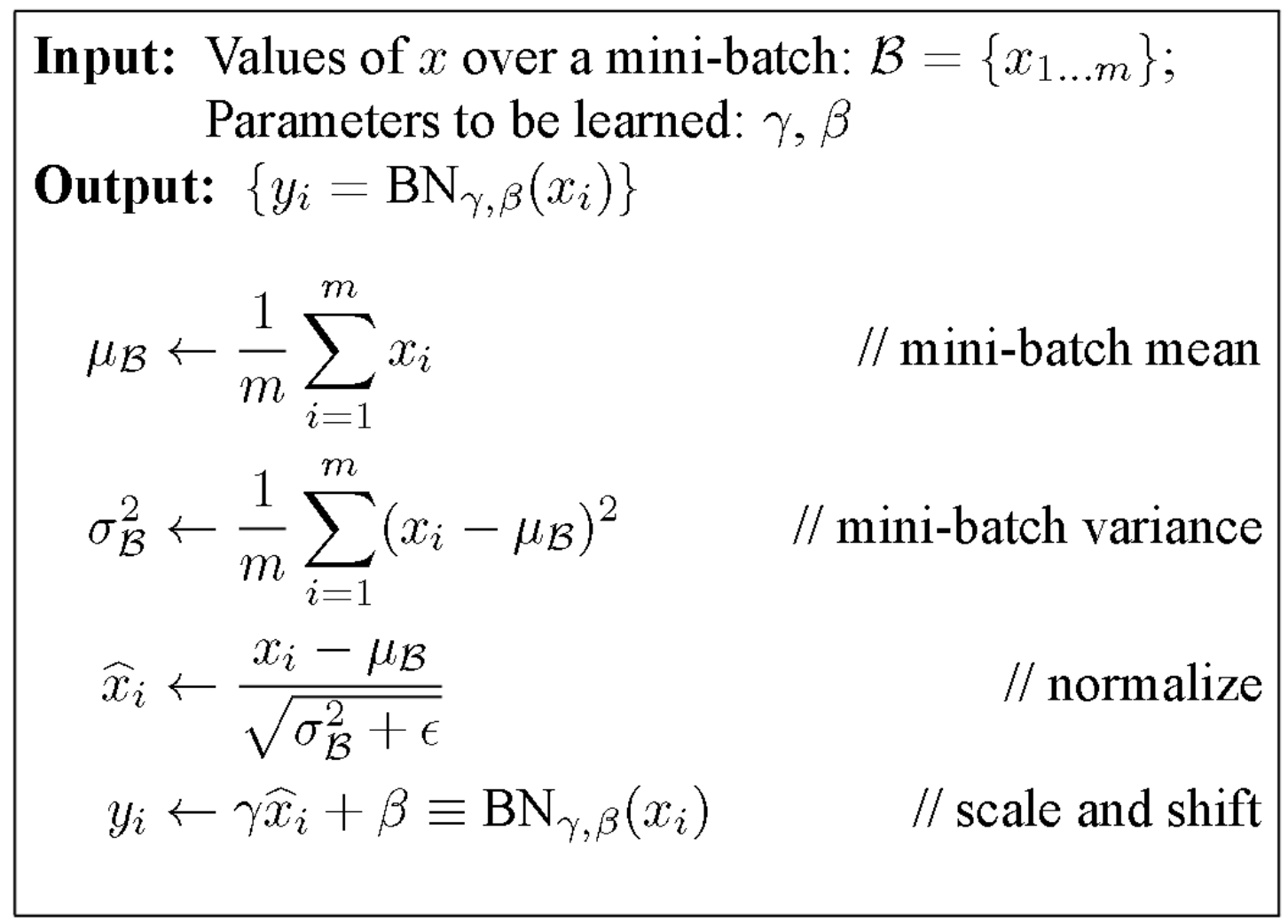
バッチの正規化
正規分布のように、入力値の偏りを調整する手法
数式
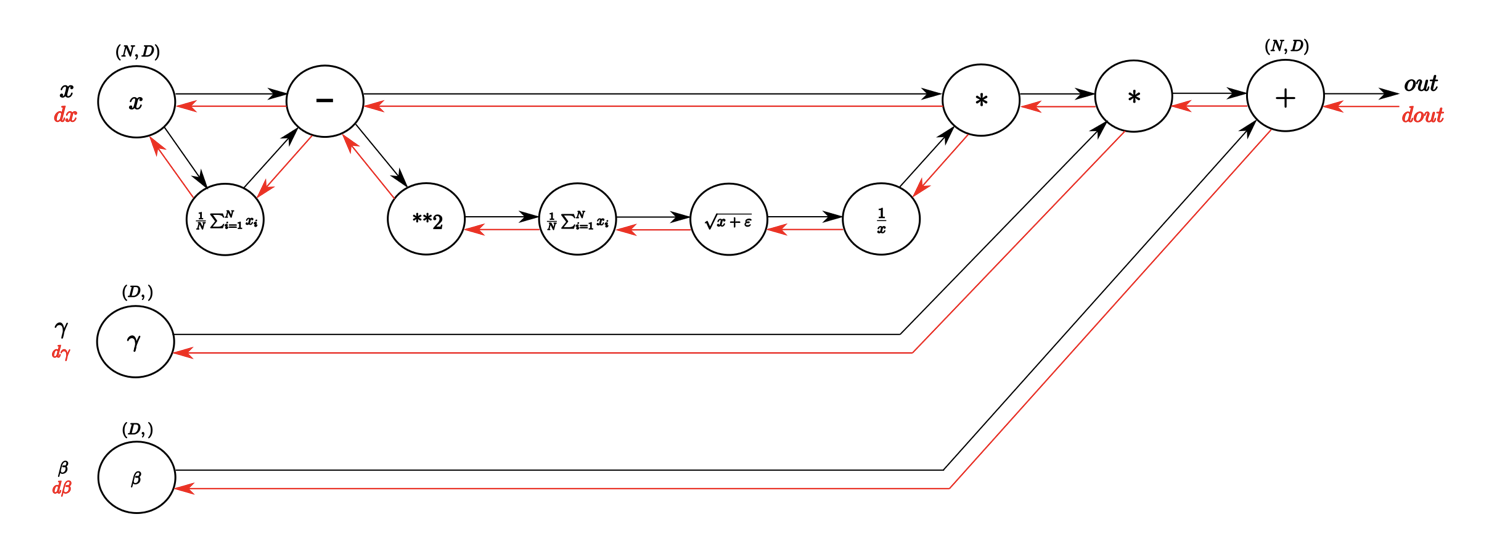
コード
Forward
def batchnorm_forward(x, gamma, beta, eps):
N, D = x.shape
#step1: calculate mean
mu = 1./N * np.sum(x, axis = 0)
#step2: subtract mean vector of every trainings example
xmu = x - mu
#step3: following the lower branch - calculation denominator
sq = xmu ** 2
#step4: calculate variance
var = 1./N * np.sum(sq, axis = 0)
#step5: add eps for numerical stability, then sqrt
sqrtvar = np.sqrt(var + eps)
#step6: invert sqrtwar
ivar = 1./sqrtvar
#step7: execute normalization
xhat = xmu * ivar
#step8: Nor the two transformation steps
gammax = gamma * xhat
#step9
out = gammax + beta
#store intermediate
cache = (xhat,gamma,xmu,ivar,sqrtvar,var,eps)
return out, cache
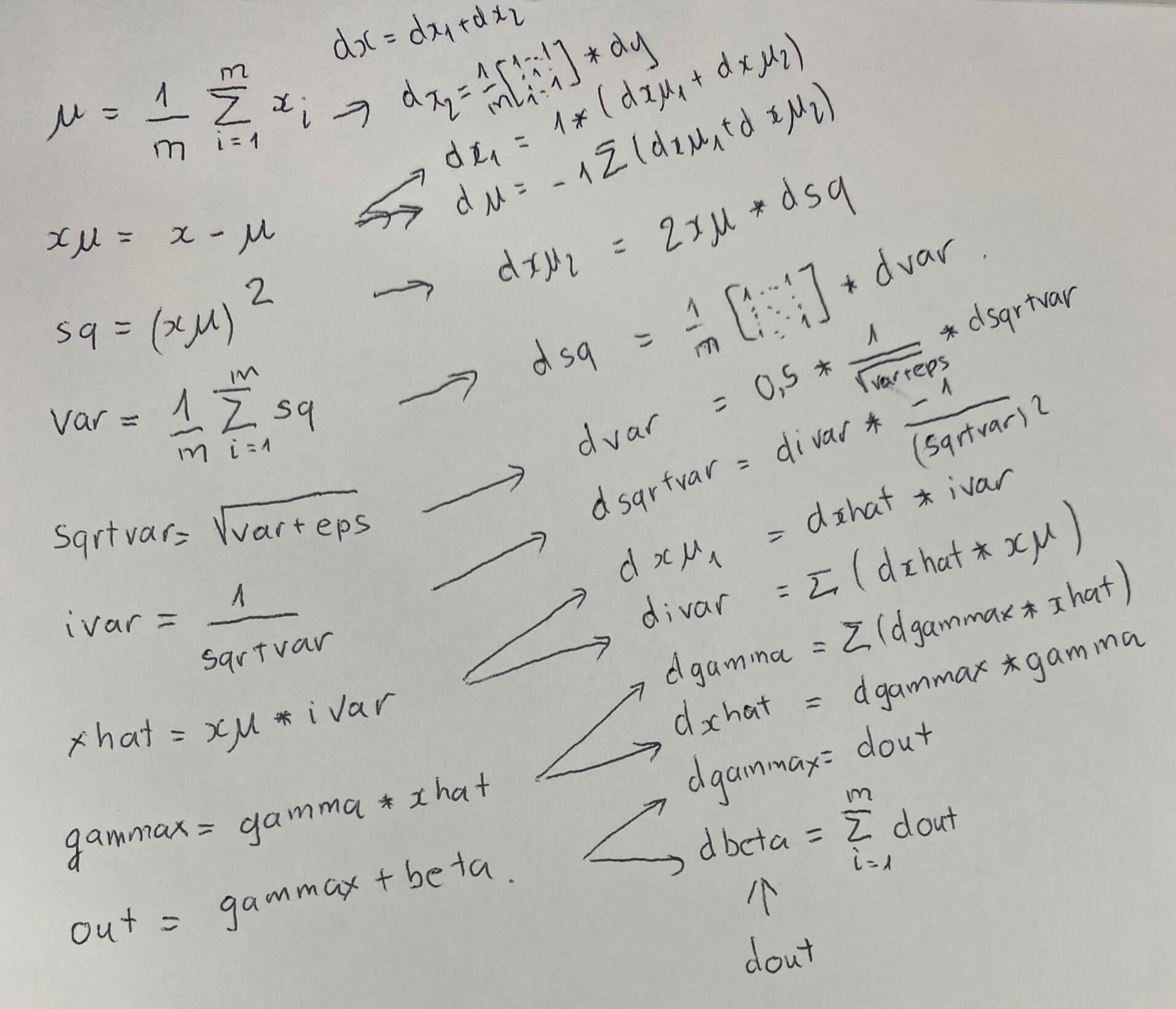
Backward
def batchnorm_backward(dout, cache):
#unfold the variables stored in cache
xhat,gamma,xmu,ivar,sqrtvar,var,eps = cache
#get the dimensions of the input/output
N,D = dout.shape
#step9
dbeta = np.sum(dout, axis=0)
dgammax = dout #not necessary, but more understandable
#step8
dgamma = np.sum(dgammax*xhat, axis=0)
dxhat = dgammax * gamma
#step7
divar = np.sum(dxhat*xmu, axis=0)
dxmu1 = dxhat * ivar
#step6
dsqrtvar = -1. /(sqrtvar**2) * divar
#step5
dvar = 0.5 * 1. /np.sqrt(var+eps) * dsqrtvar
#step4
dsq = 1. /N * np.ones((N,D)) * dvar
#step3
dxmu2 = 2 * xmu * dsq
#step2
dx1 = (dxmu1 + dxmu2)
dmu = -1 * np.sum(dxmu1+dxmu2, axis=0)
#step1
dx2 = 1. /N * np.ones((N,D)) * dmu
#step0
dx = dx1 + dx2
return dx, dgamma, dbeta
効果
- 多少ノイズがInputに追加されたため、過学習の抑止を期待できる。
- 学習率を大きく設定しても、Inputが正規化されたため、勾配消失・爆発を抑えられる。
学習率最適化手法
勾配降下法
w^{(t+1)} = w^{(t)} - \epsilon\Delta E
モメンタム
V_{t} = \mu V_{t-1} - \epsilon\Delta E\\
w^{(t+1)} = w^{(t)} + V_{t}\\
\mu :慣性
class Momentum:
def __init__(self, learning_rate=0.01, momentum=0.9):
self.learning_rate = learning_rate
self.momentum = momentum
self.v = None
def update(self, params, grad):
if self.v is None:
self.v = {}
for key, val in params.items():
self.v[key] = np.zeros_like(val)
for key in params.keys():
self.v[key] = self.momentum * self.v[key] - self.learning_rate * grad[key]
params[key] += self.v[key]
特徴
- 局所的最適解にならず、大局的最適解となる
- 最適値に行くまでの時間が早い
AdaGrad
h_{t} = h_{t-1} + (\Delta E)^2\\
w^{(t+1)} = w^{(t)} - \epsilon \frac{1}{\sqrt{h_{t}}} \Delta E\\
class AdaGrad:
def __init__(self, learning_rate=0.01):
self.learning_rate = learning_rate
self.h = None
def update(self, params, grad):
if self.h is None:
self.h = {}
for key, val in params.items():
self.h[key] = np.zeros_like(val)
for key in params.keys():
self.h[key] += grad[key] * grad[key]
params[key] -= self.learning_rate * grad[key] / (np.sqrt(self.h[key]) + 1e-7)
特徴
- 勾配の穏やかな斜面に対して、最適値に近いづける
- 学習率が徐々に小さくなるため、鞍点問題が起こることもある
RMSProp
h_{t} = \alpha h_{t-1} + (1 -\alpha)(\Delta E)^2\\
w^{(t+1)} = w^{(t)} - \epsilon \frac{1}{\sqrt{h_{t}} + \theta} \Delta E\\
class RMSprop:
def __init__(self, learning_rate=0.01, decay_rate = 0.99):
self.learning_rate = learning_rate
self.decay_rate = decay_rate
self.h = None
def update(self, params, grad):
if self.h is None:
self.h = {}
for key, val in params.items():
self.h[key] = np.zeros_like(val)
for key in params.keys():
self.h[key] *= self.decay_rate
self.h[key] += (1 - self.decay_rate) * grad[key] * grad[key]
params[key] -= self.learning_rate * grad[key] / (np.sqrt(self.h[key]) + 1e-7)
特徴
- 局所的最適解にならず、大局的最適解となる
- AdaGradの進化系
- AdaGradに比べたら、ハイパーパラメーターの調整が少ない
Adam
モメンタムの、過去の勾配の指数関数的減衰平均と
RMSPropの、過去の勾配の2乗の指数関数的減衰平均を
孕んだ最適化アルゴリズム
m_{t} = \beta_{1} m_{t-1} + (1 -\beta_{1})\Delta E\\
v_{t} = \beta_{2} v_{t-1} + (1 -\beta_{2})(\Delta E)^2\\
w^{(t+1)} = w^{(t)} - \epsilon \frac{m_{t}}{\sqrt{v_{t}} + \theta} \\
class Adam:
def __init__(self, learning_rate=0.001, beta1=0.9, beta2=0.999):
self.learning_rate = learning_rate
self.beta1 = beta1
self.beta2 = beta2
self.iter = 0
self.m = None
self.v = None
def update(self, params, grad):
if self.m is None:
self.m, self.v = {}, {}
for key, val in params.items():
self.m[key] = np.zeros_like(val)
self.v[key] = np.zeros_like(val)
self.iter += 1
lr_t = self.learning_rate * np.sqrt(1.0 - self.beta2 ** self.iter) / (1.0 - self.beta1 ** self.iter)
for key in params.keys():
self.m[key] += (1 - self.beta1) * (grad[key] - self.m[key])
self.v[key] += (1 - self.beta2) * (grad[key] ** 2 - self.v[key])
params[key] -= lr_t * self.m[key] / (np.sqrt(self.v[key]) + 1e-7)
過学習
原因
- 学習データに対して、パラメーター数が圧倒的に多い
- パラメーターの値が適切ではない
- ノード(層)が多い
正則化
過学習を抑止するため、ネットワークの(パラメーター、層など)を制約する
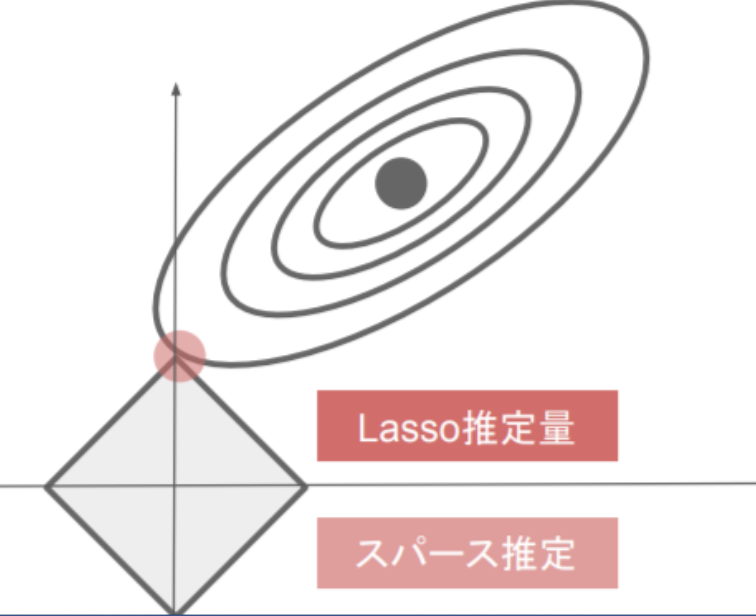
L1正則化-Lasso
\|W\|_1 = (| w_1| + | w_2| +...+ | w_n|)\\
E_n(W) + \lambda \|W\|_1\\
λ:weight_decay_lambda
ソース
# 正則化強度設定 ======================================
weight_decay_lambda = 0.005
# =================================================
for i in range(iters_num):
batch_mask = np.random.choice(train_size, batch_size)
x_batch = x_train[batch_mask]
d_batch = d_train[batch_mask]
grad = network.gradient(x_batch, d_batch)
weight_decay = 0
for idx in range(1, hidden_layer_num+1):
grad['W' + str(idx)] = network.layers['Affine' + str(idx)].dW + weight_decay_lambda * np.sign(network.params['W' + str(idx)])
grad['b' + str(idx)] = network.layers['Affine' + str(idx)].db
network.params['W' + str(idx)] -= learning_rate * grad['W' + str(idx)]
network.params['b' + str(idx)] -= learning_rate * grad['b' + str(idx)]
weight_decay += weight_decay_lambda * np.sum(np.abs(network.params['W' + str(idx)]))
loss = network.loss(x_batch, d_batch) + weight_decay
train_loss_list.append(loss)
解説
正則化付き勾配
grad[W] = grad[w] + λ *np.sign(W)
grad['W' + str(idx)] = network.layers['Affine' + str(idx)].dW + weight_decay_lambda * np.sign(network.params['W' + str(idx)])
損失計算
weight_decay = 0
for idx in range(1, hidden_layer_num+1):
...
weight_decay += weight_decay_lambda * np.sum(np.abs(network.params['W' + str(idx)]))
loss = network.loss(x_batch, d_batch) + weight_decay
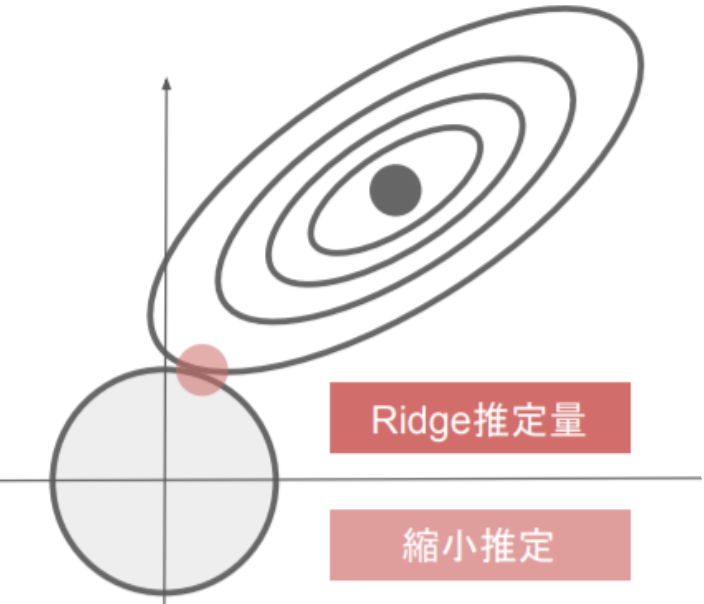
L2正則化-Ridge
\|W\|_2 = \sqrt{(| w_1|^2 + | w_2|^2 +...+ | w_n|^2)}\\
E_n(W) + \frac{1}{2} \lambda \|W\|_2\\
λ:weight_decay_lambda
ソース
# 正則化強度設定 ======================================
weight_decay_lambda = 0.1
# =================================================
for i in range(iters_num):
batch_mask = np.random.choice(train_size, batch_size)
x_batch = x_train[batch_mask]
d_batch = d_train[batch_mask]
grad = network.gradient(x_batch, d_batch)
weight_decay = 0
for idx in range(1, hidden_layer_num+1):
grad['W' + str(idx)] = network.layers['Affine' + str(idx)].dW + weight_decay_lambda * network.params['W' + str(idx)]
grad['b' + str(idx)] = network.layers['Affine' + str(idx)].db
network.params['W' + str(idx)] -= learning_rate * grad['W' + str(idx)]
network.params['b' + str(idx)] -= learning_rate * grad['b' + str(idx)]
weight_decay += 0.5 * weight_decay_lambda * np.sqrt(np.sum(network.params['W' + str(idx)] ** 2))
loss = network.loss(x_batch, d_batch) + weight_decay
train_loss_list.append(loss)
解説
正則化付き勾配
grad[W] = grad[w] + λ *W
grad['W' + str(idx)] = network.layers['Affine' + str(idx)].dW + weight_decay_lambda * network.params['W' + str(idx)]
損失計算
weight_decay = 0
for idx in range(1, hidden_layer_num+1):
...
weight_decay += 0.5 * weight_decay_lambda * np.sqrt(np.sum(network.params['W' + str(idx)] ** 2))
loss = network.loss(x_batch, d_batch) + weight_decay
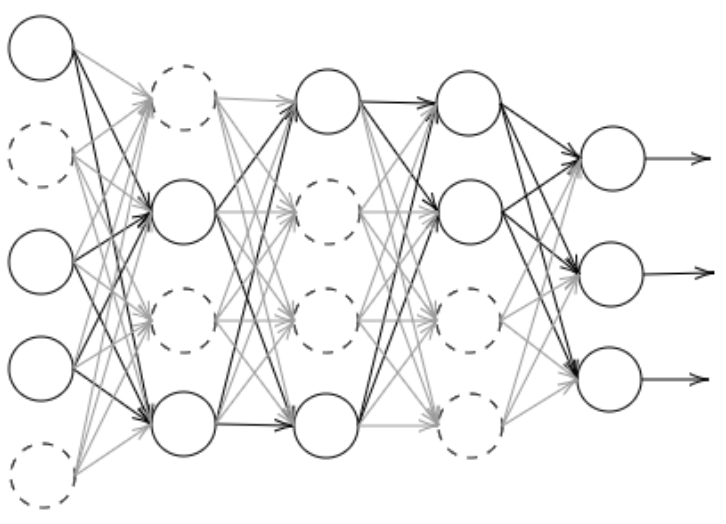
ドロップアウト
ランダムにノードを削除し、学習する
ソース
class Dropout:
def __init__(self, dropout_ratio=0.5):
self.dropout_ratio = dropout_ratio
self.mask = None
def forward(self, x, train_flg=True):
if train_flg:
self.mask = np.random.rand(*x.shape) > self.dropout_ratio
return x * self.mask
else:
return x * (1.0 - self.dropout_ratio)
def backward(self, dout):
return dout * self.mask
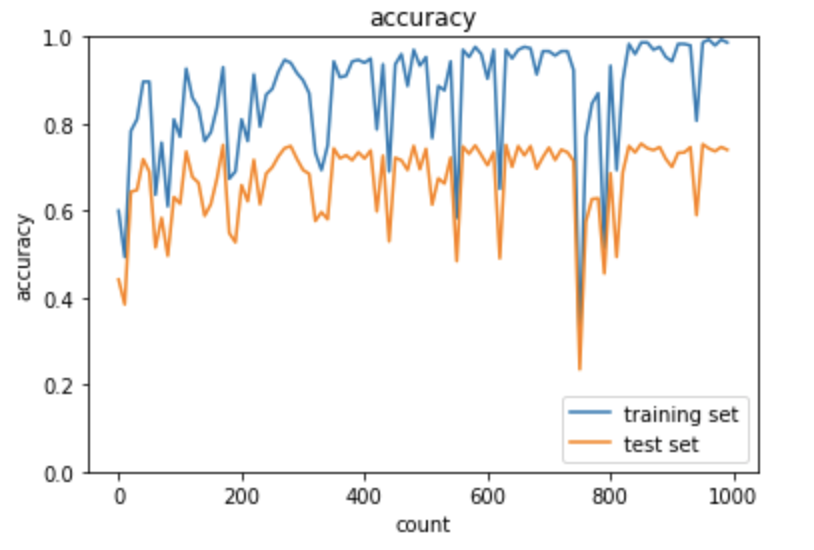
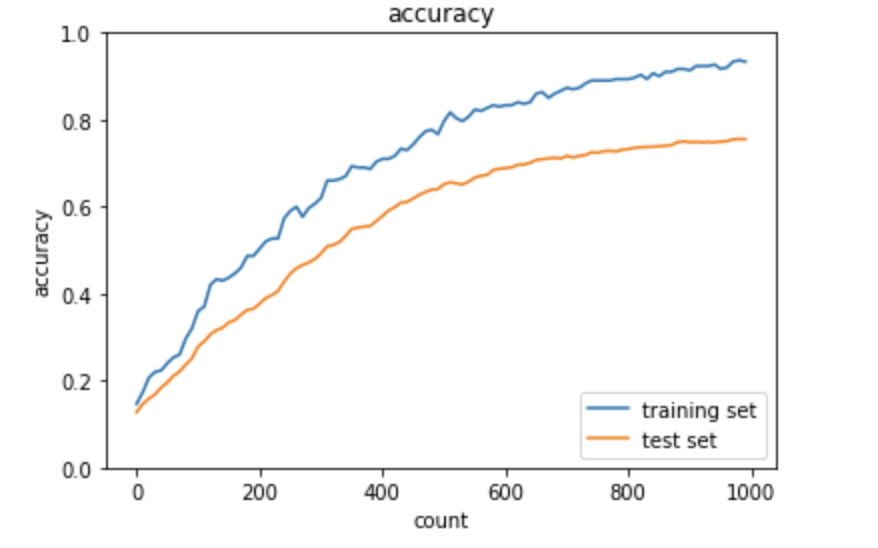
学習結果
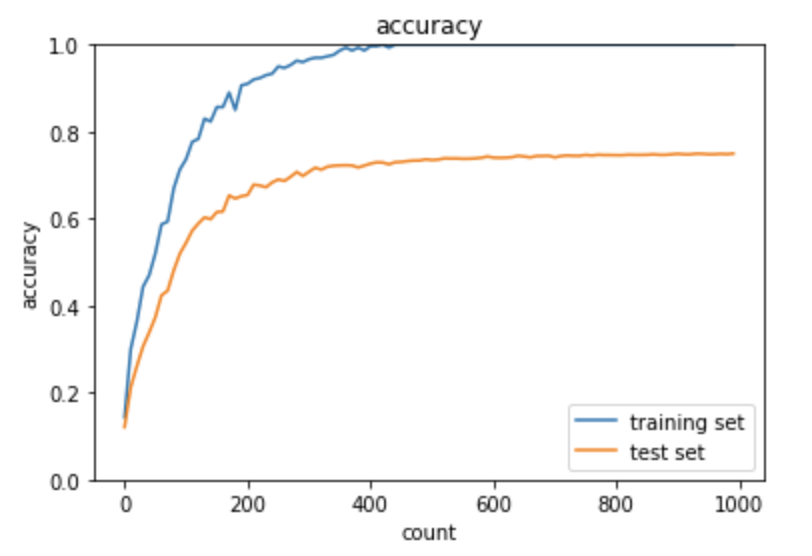
過学習
学習データに対する正解率が1.0に達しているが、
テストデータに対する正解率が0.65前後に止まっている。
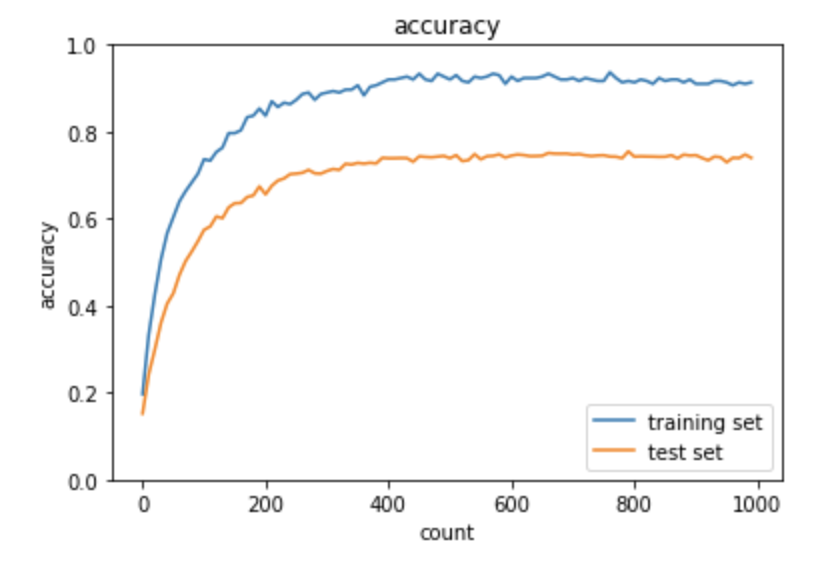
L1正則化
スパース化の影響により、正解率の変動幅が激しくなり、
過学習が多少改善できている
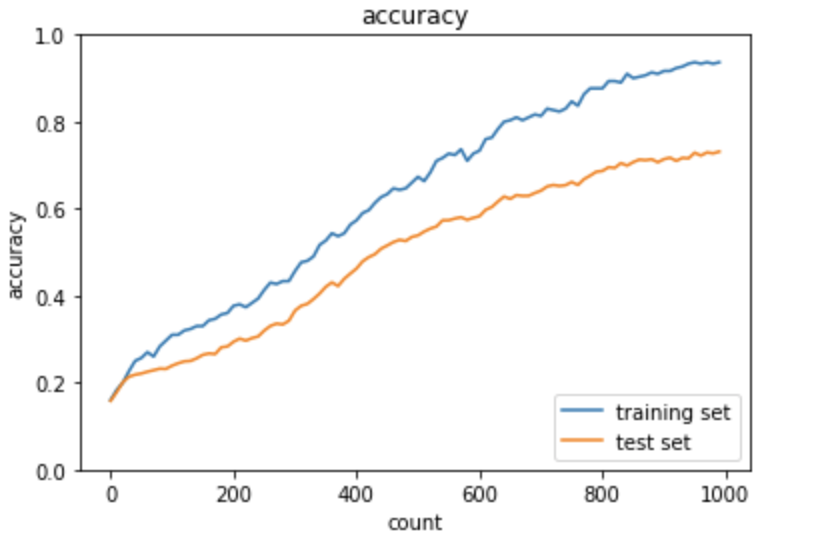
L2正則化
学習データに対する正解率が1.0に達していないが、
テストデータに対する正解率も0.65前後に止まっている。
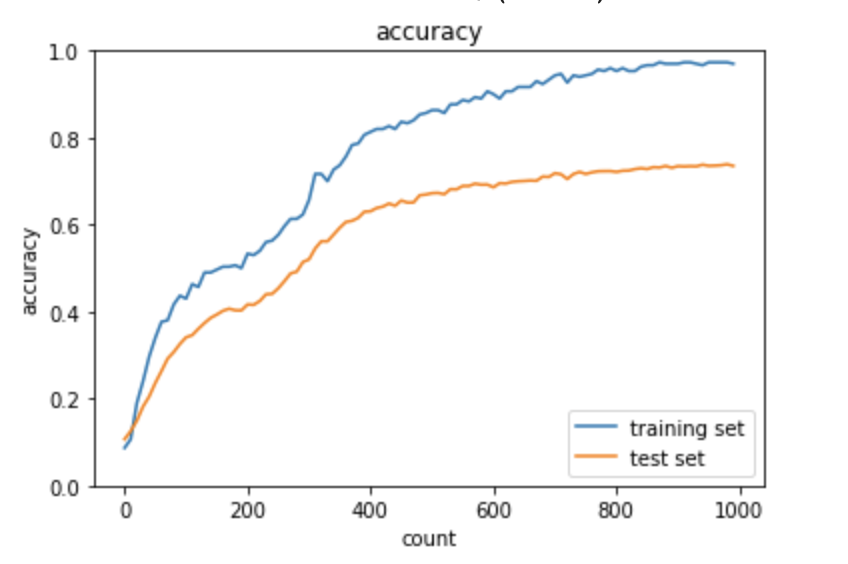
ドロップアウト
滑らかに学習できている
ドロップアウト+L1正則化
ドロップアウト+L2正則化
畳み込みニューラルネットワークの概念
畳み込み層
写真のデータだと、縦・横・チャネルが存在しているため、
1次元の配列に変化すると、左、上、右、下のピクセルの関係がなくなる。
畳み込み層を利用すると、そういう関係を保ちつつ、学習できる。
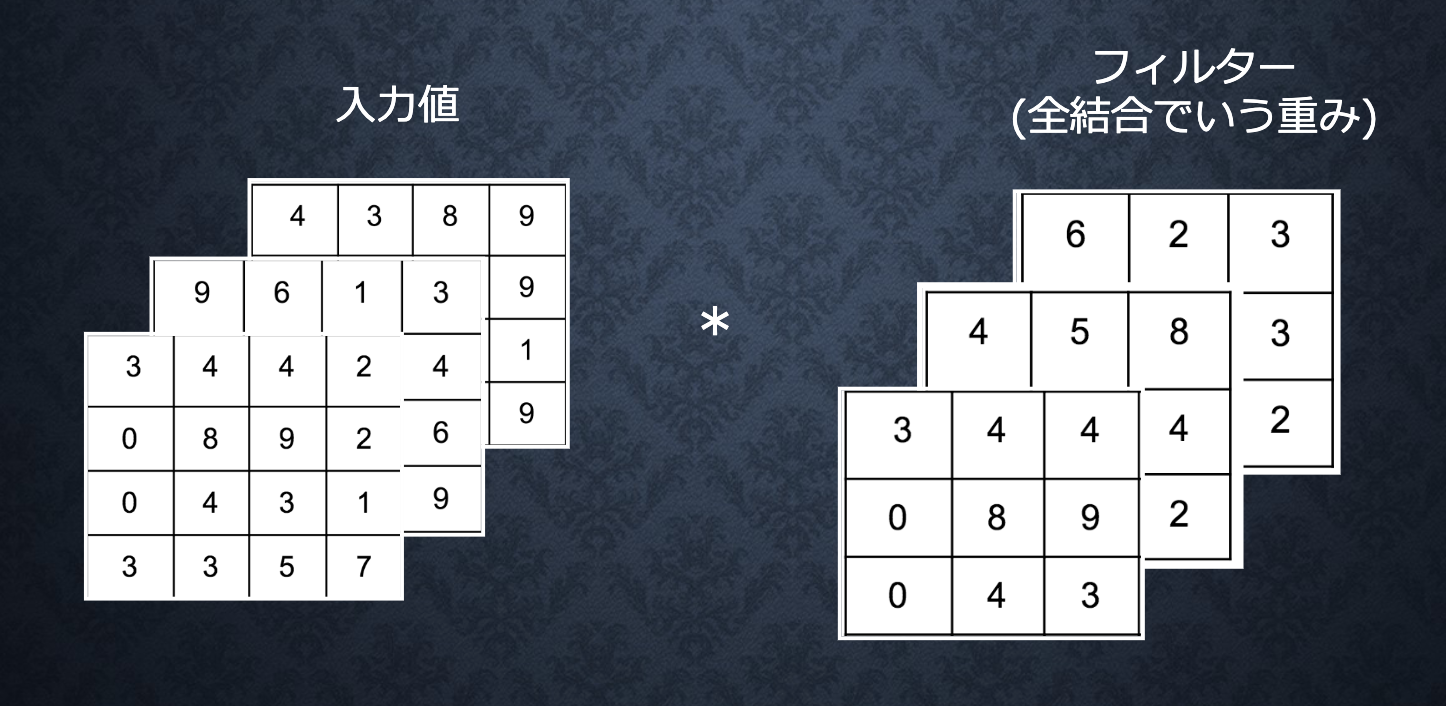
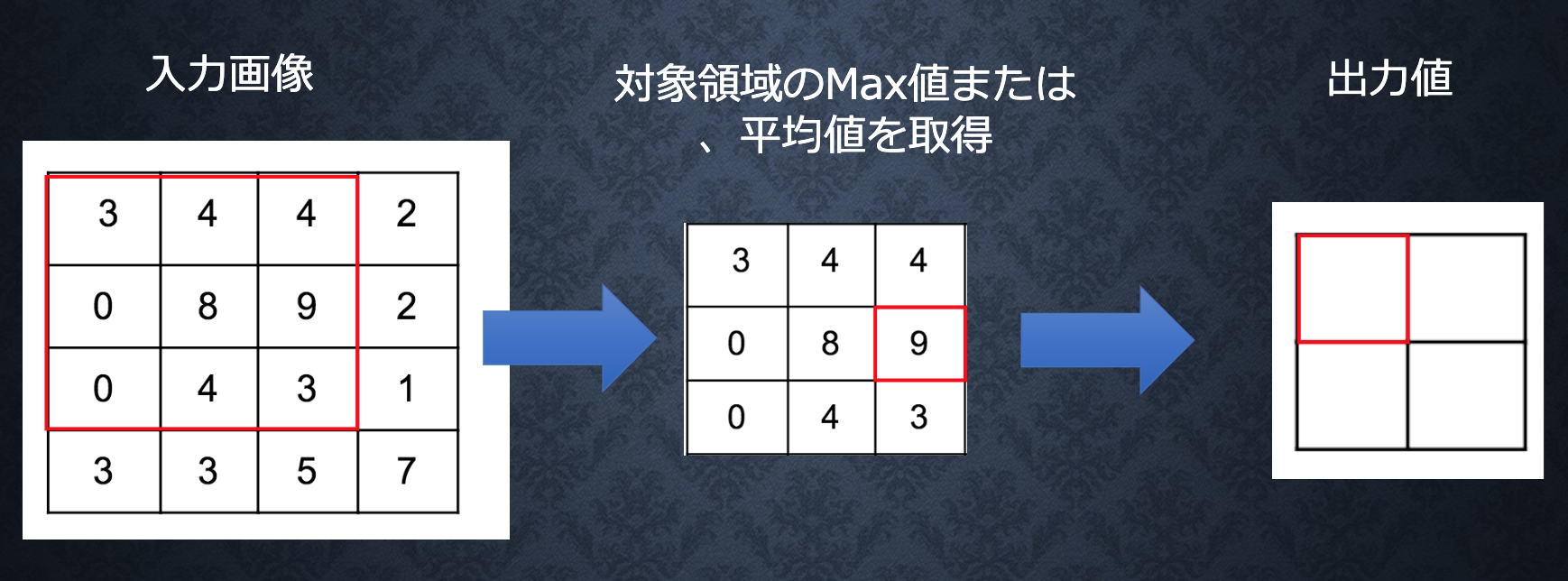
演算概念
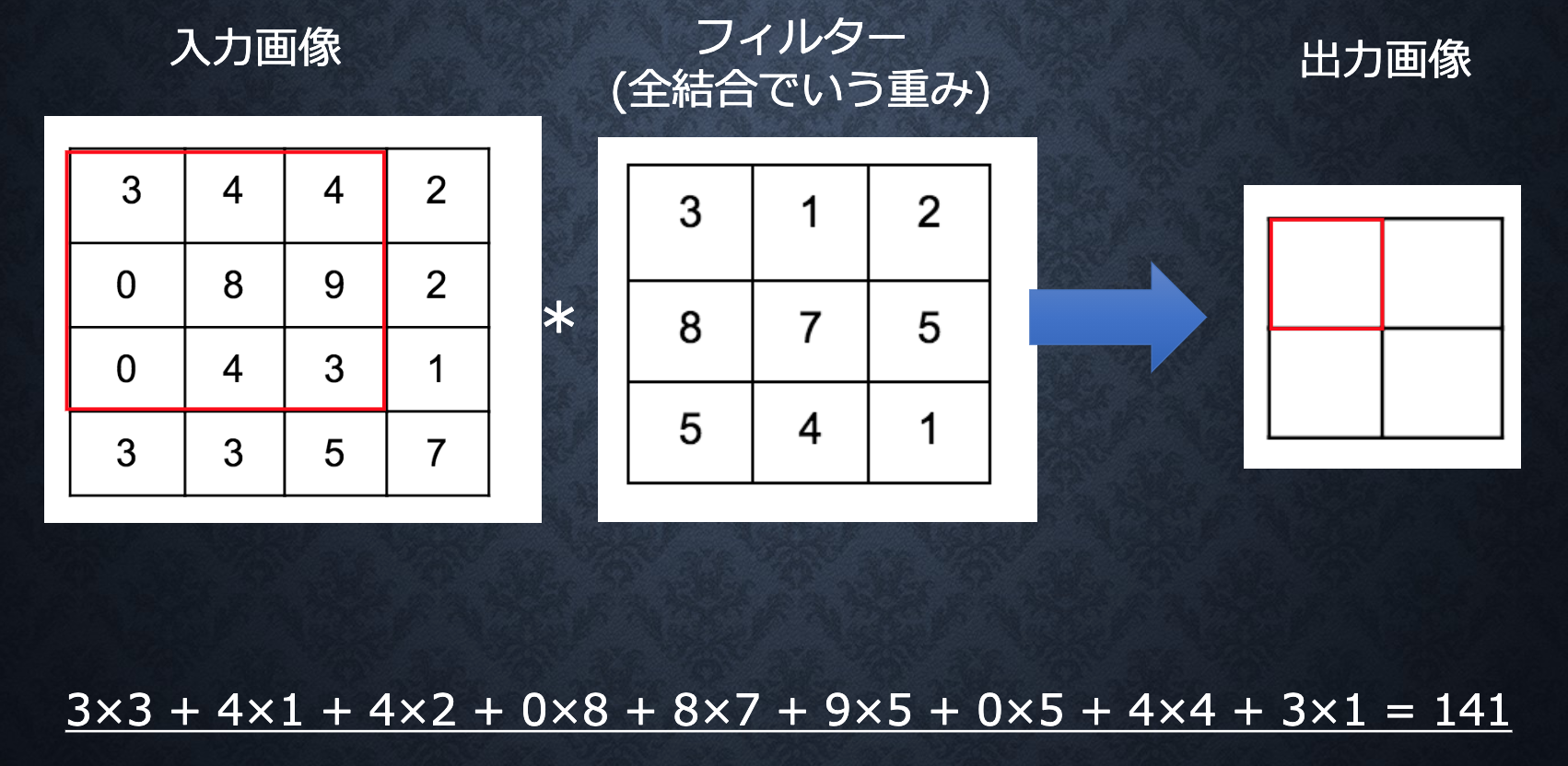
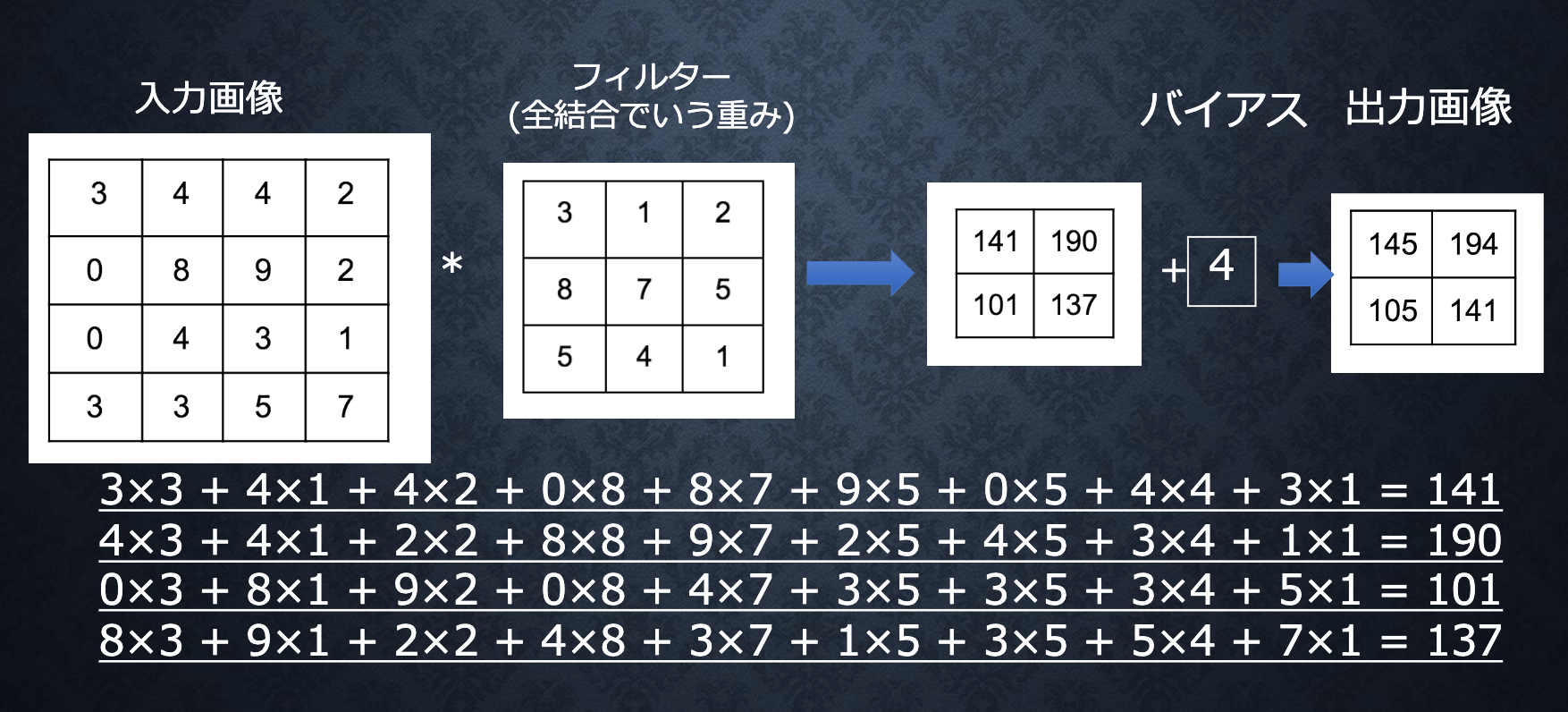
バイアス
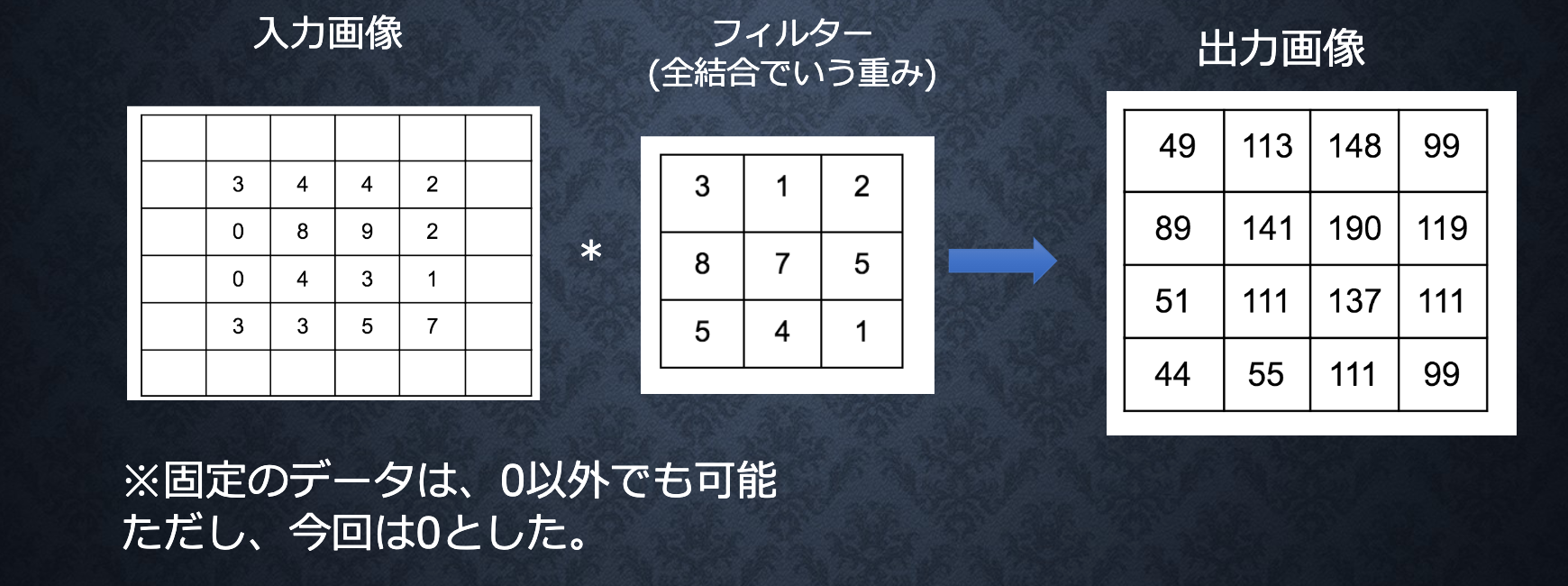
パディング
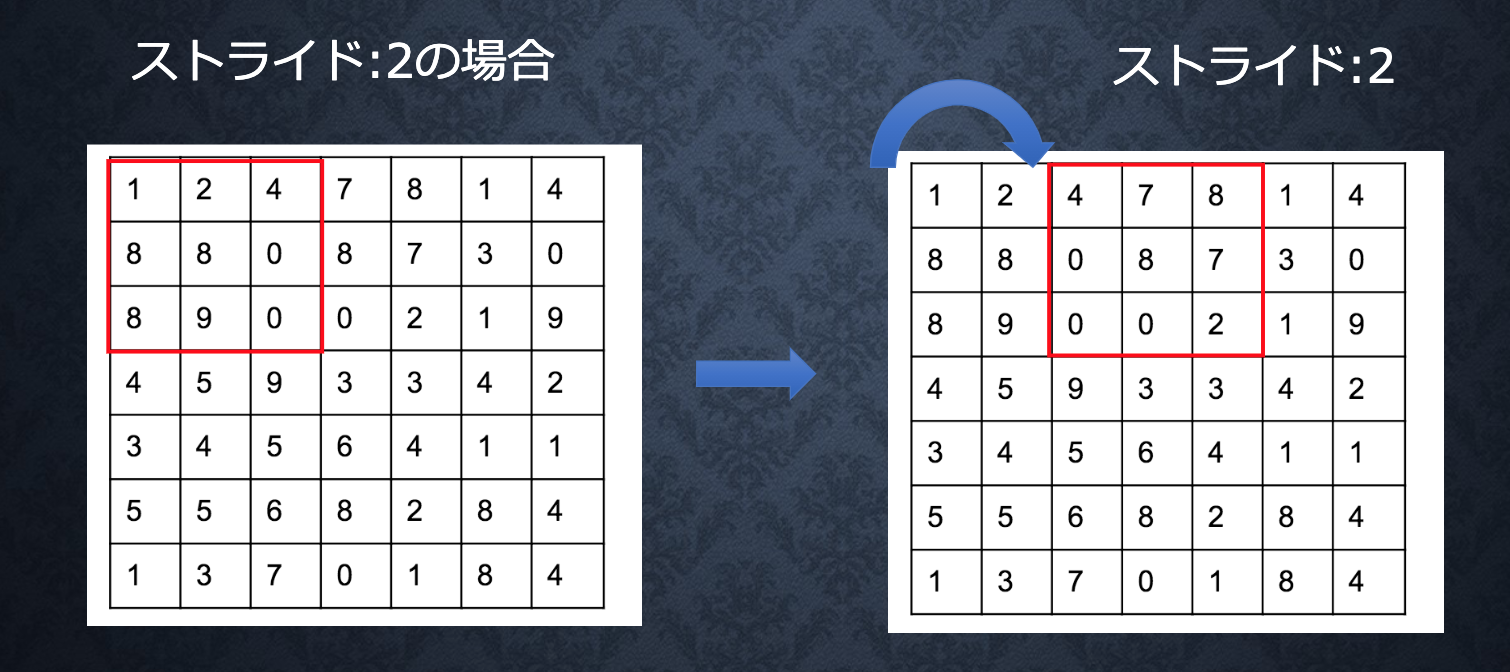
ストライド
チャンネル
出力サイズの計算
出力値のheight, width
#入力
input_h
input_w
#フィルタ
filter_h
filter_w
#パディング
padding
#ストライド
stride
#出力
output_h
output_w
#算出
output_h = 1 + int((input_h + 2 * padding - filter_h) / stride)
output_w = 1 + int((input_w + 2 * padding - filter_w) / stride)
ソース
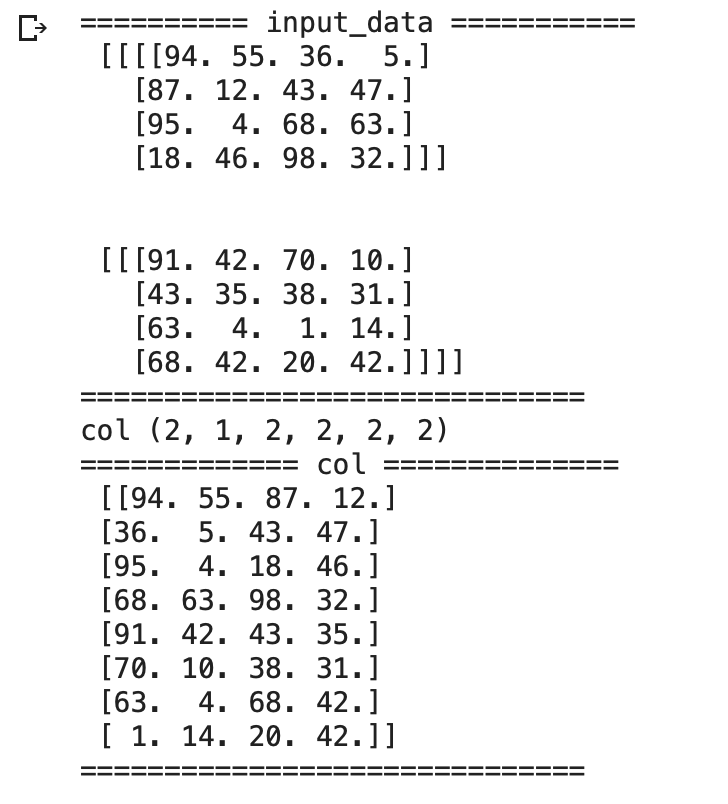
im2col
# 画像データを2次元配列に変換
'''
input_data: 入力値
filter_h: フィルターの高さ
filter_w: フィルターの横幅
stride: ストライド
pad: パディング
'''
def im2col(input_data, filter_h, filter_w, stride=1, pad=0):
# N: number, C: channel, H: height, W: width
N, C, H, W = input_data.shape
out_h = (H + 2 * pad - filter_h)//stride + 1
out_w = (W + 2 * pad - filter_w)//stride + 1
img = np.pad(input_data, [(0,0), (0,0), (pad, pad), (pad, pad)], 'constant')
col = np.zeros((N, C, filter_h, filter_w, out_h, out_w))
for y in range(filter_h):
y_start = y
y_max = y_start + stride * out_h
for x in range(filter_w):
x_start = x
x_max = x_start + stride * out_w
col[:, :, y, x, :, :] = img[:, :, y_start:y_max:stride, x_start:x_max:stride]
col = col.transpose(0, 4, 5, 1, 2, 3) # (N, C, filter_h, filter_w, out_h, out_w) -> (N, filter_w, out_h, out_w, C, filter_h)
col = col.reshape(N * out_h * out_w, -1)
return col
確認
input_data = np.random.rand(2, 1, 4, 4)*100//1 # number, channel, height, widthを表す
print('========== input_data ===========\n', input_data)
print('==============================')
filter_h = 2
filter_w = 2
stride = 2
pad = 0
col = im2col(input_data, filter_h=filter_h, filter_w=filter_w, stride=stride, pad=pad)
print('============= col ==============\n', col)
print('==============================')
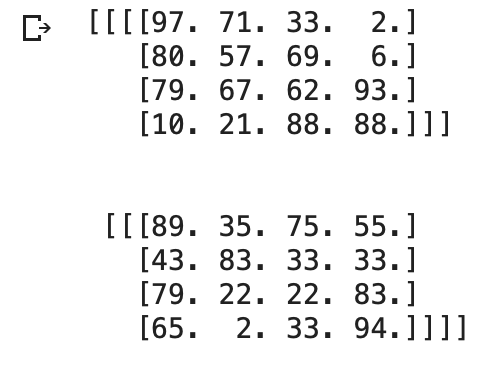
col2im
# 2次元配列を画像データに変換
def col2im(col, input_shape, filter_h, filter_w, stride=1, pad=0):
# N: number, C: channel, H: height, W: width
N, C, H, W = input_shape
# 切り捨て除算
out_h = (H + 2 * pad - filter_h)//stride + 1
out_w = (W + 2 * pad - filter_w)//stride + 1
col = col.reshape(N, out_h, out_w, C, filter_h, filter_w).transpose(0, 3, 4, 5, 1, 2) # (N, filter_h, filter_w, out_h, out_w, C)
img = np.zeros((N, C, H + 2 * pad + stride - 1, W + 2 * pad + stride - 1))
for y in range(filter_h):
y_max = y + stride * out_h
for x in range(filter_w):
x_max = x + stride * out_w
img[:, :, y:y_max:stride, x:x_max:stride] = col[:, :, y, x, :, :]
return img[:, :, pad:H + pad, pad:W + pad]
確認
img = col2im(col, input_shape=(2, 1, 4, 4),filter_h=filter_h, filter_w=filter_w, stride=stride, pad=pad)
print(img)
Convolution
class Convolution:
# W: フィルター, b: バイアス
def __init__(self, W, b, stride=1, pad=0):
self.W = W
self.b = b
self.stride = stride
self.pad = pad
# 中間データ(backward時に使用)
self.x = None
self.col = None
self.col_W = None
# フィルター・バイアスパラメータの勾配
self.dW = None
self.db = None
def forward(self, x):
# FN: filter_number, C: channel, FH: filter_height, FW: filter_width
FN, C, FH, FW = self.W.shape
N, C, H, W = x.shape
# 出力値のheight, width
out_h = 1 + int((H + 2 * self.pad - FH) / self.stride)
out_w = 1 + int((W + 2 * self.pad - FW) / self.stride)
# xを行列に変換
col = im2col(x, FH, FW, self.stride, self.pad)
# フィルターをxに合わせた行列に変換
col_W = self.W.reshape(FN, -1).T
print('col',col.shape)
print('col_W',col_W.shape)
out = np.dot(col, col_W) + self.b
# 計算のために変えた形式を戻す
out = out.reshape(N, out_h, out_w, -1).transpose(0, 3, 1, 2)
print('out',out.shape)
self.x = x
self.col = col
self.col_W = col_W
return out
def backward(self, dout):
FN, C, FH, FW = self.W.shape
dout = dout.transpose(0, 2, 3, 1).reshape(-1, FN)
self.db = np.sum(dout, axis=0)
self.dW = np.dot(self.col.T, dout)
self.dW = self.dW.transpose(1, 0).reshape(FN, C, FH, FW)
dcol = np.dot(dout, self.col_W.T)
# dcolを画像データに変換
dx = col2im(dcol, self.x.shape, FH, FW, self.stride, self.pad)
return dx
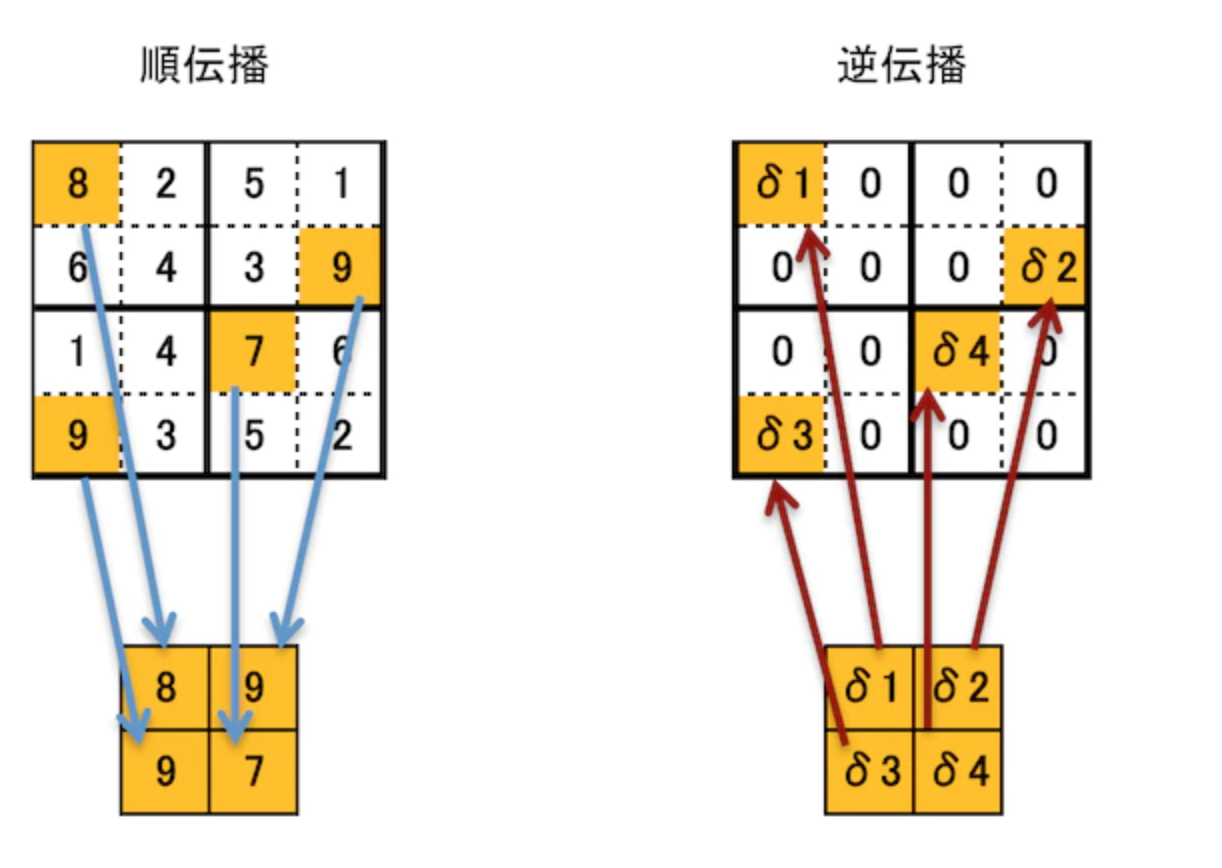
プーリング層
ソース
class Pooling:
def __init__(self, pool_h, pool_w, stride=1, pad=0):
self.pool_h = pool_h
self.pool_w = pool_w
self.stride = stride
self.pad = pad
self.x = None
self.arg_max = None
def forward(self, x):
N, C, H, W = x.shape
out_h = int(1 + (H - self.pool_h) / self.stride)
out_w = int(1 + (W - self.pool_w) / self.stride)
# xを行列に変換
col = im2col(x, self.pool_h, self.pool_w, self.stride, self.pad)
# プーリングのサイズに合わせてリサイズ
col = col.reshape(-1, self.pool_h*self.pool_w)
# 行ごとに最大値を求める
arg_max = np.argmax(col, axis=1)
out = np.max(col, axis=1)
# 整形
out = out.reshape(N, out_h, out_w, C).transpose(0, 3, 1, 2)
self.x = x
self.arg_max = arg_max
return out
def backward(self, dout):
dout = dout.transpose(0, 2, 3, 1)
pool_size = self.pool_h * self.pool_w
dmax = np.zeros((dout.size, pool_size))
dmax[np.arange(self.arg_max.size), self.arg_max.flatten()] = dout.flatten()
dmax = dmax.reshape(dout.shape + (pool_size,))
dcol = dmax.reshape(dmax.shape[0] * dmax.shape[1] * dmax.shape[2], -1)
dx = col2im(dcol, self.x.shape, self.pool_h, self.pool_w, self.stride, self.pad)
return dx
最新CNN
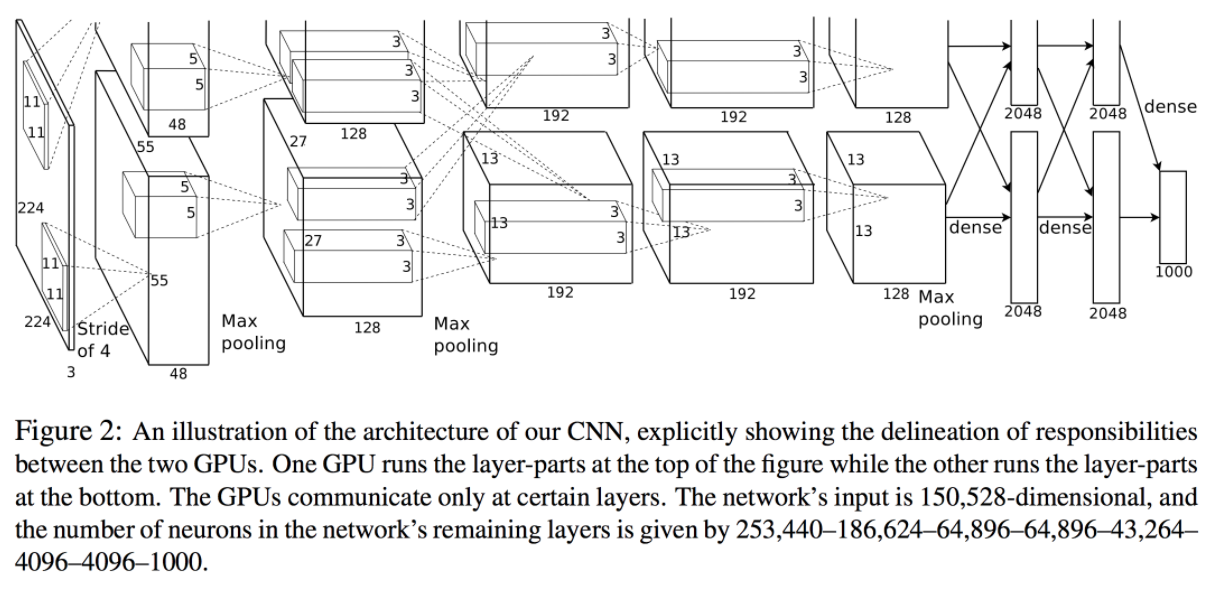
AlexNet
#### 概要
2012年、ヒントン 教授チームに発表される物体認識のモデル
初の深層学習概念を取り組むモデル
#### 構造
input:224×224×3の写真
output:1000個の要素を持つ一次元の配列
畳み込み層:5
プーリング層:3
全結合層:3
#### ソース・Keras
#Alex net
model = Sequential()
# Layer 1
model.add(Conv2D(48, kernel_size=(11, 11), strides=(4,4), input_shape=(224, 224, 3),activation='relu'))
model.add(MaxPooling2D(pool_size=(2, 2), strides=(2,2), padding='same'))
model.add(BatchNormalization())
# Layer 2
model.add(Conv2D(128, kernel_size=(5, 5), activation='relu'))
model.add(MaxPooling2D(pool_size=(2, 2), strides=(2,2), padding='same'))
model.add(BatchNormalization())
# Layer 3
model.add(Conv2D(192, kernel_size=(3, 3), activation='relu'))
model.add(BatchNormalization())
# Layer 4
model.add(Conv2D(192, kernel_size=(3, 3), activation='relu'))
model.add(BatchNormalization())
# Layer 5
model.add(Conv2D(128, kernel_size=(3, 3), activation='relu'))
model.add(MaxPooling2D(pool_size=(2, 2), strides=(2,2), padding='same'))
model.add(BatchNormalization())
model.add(Flatten())
# Layer 6
model.add(Dense(2048, activation='relu'))
model.add(BatchNormalization())
model.add(Dropout(0.01))
# Layer 7
model.add(Dense(2048, activation='relu'))
model.add(BatchNormalization())
model.add(Dropout(0.01))
# Layer 8
model.add(Dense(1000, activation="softmax"))
model.summary()
model.compile(optimizer=keras.optimizers.Adam(lr=0.001),
loss='categorical_crossentropy',
metrics = ['accuracy'])