はじめに
はじめまして、porizouです。
普段はROSを用いた自律移動ロボット開発の仕事をしています。
今さらROS,Navigationの記事を投稿するかどうか迷ったのですが、まだ使っている人が多そうだったので記事を書くことにしました。
ROSのNavigationStackを使用していて、move_baseのパラメータをノード実行中に動的に変更する必要があったので、Dynamic Reconfigureを使用してrqt_reconfigureでGUIから変更する場合と他ノードから変更する場合それぞれについて方法をまとめました。
Dynamic Reconfigureについて
Dynamic Reconfigureとはノード実行中にrosparamの値を動的に変更することができるROSの機能です。
Dynamic Reconfigure自体の説明については以下ROS講座の記事がわかりやすいので、本記事では詳細は省略します。
move_baseのパラメータは一部を除きDynamic ReconfigureのServerを使って実装されているため、ノード実行中に動的に変更することができます。
テスト環境
以下の環境で動作確認しました。Noeticを使っていますがMelodicでも同様の手順でできます。
| 項目 | 値 |
|---|---|
| CPU | Ryzen5 |
| OS | Ubuntu20.04LTS |
| ROS | Noetic |
move_baseの動作確認にはおなじみのTurtlebot3のGazeboシミュレーションを使用しました。
https://github.com/ROBOTIS-GIT/turtlebot3_simulations
変更可能なパラメータ
以下Local Plannerにdwa_local_plannerを使用した場合のDynamic Reconfigureで変更可能なmove_base関連パラメータです。
Global Plannerやmove_base本体のパラメータ(controller_frequencyなど)は動的に変更することができません。
| 名前 | 説明 |
|---|---|
| /move_base/DWAPlannerROS | dwa_local_plannerのパラメータ |
| /move_base/global_costmap/inflation_layer | Global CostmapのInflation Layerのパラメータ |
| /move_base/global_costmap/obstacle_layer | Global CostmapのObstacle Layerのパラメータ |
| /move_base/local_costmap/inflation_layer | Local CostmapのInflation Layerのパラメータ |
| /move_base/local_costmap/obstacle_layer | Local CostmapのObstacle Layerのパラメータ |
追記:LocalPlannerにbase_local_plannerを使用した場合は/move_base/TrajectryPlannerROSという名前で定義されています。
rqt_reconfigureから変更する方法
rqt_reconfigureを使うことでGUI画面からパラメータを動的に変更することができます。
move_baseが起動している状態で以下のコマンドで実行。
$ rosrun rqt_reconfigure rqt_reconfigure
こんな感じの画面が出てきます。
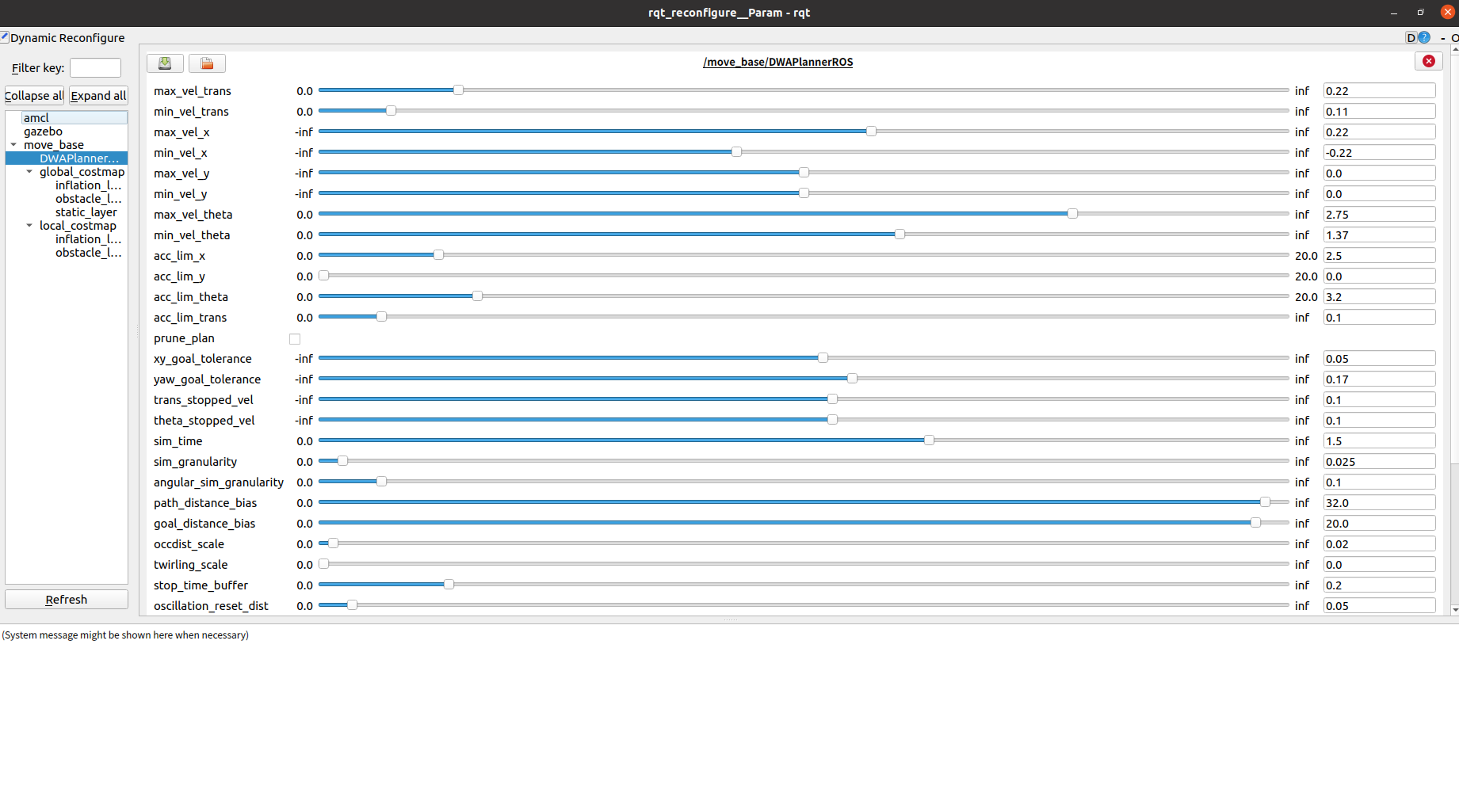
各パラメータの青いバーを動かすことでパラメータが変更できます。
rqt_reconfigureを使うことで、わざわざ設定ファイルを書き換えてノードを再起動しなくてもロボットを動かしながらmove_baseのパラメータ調整をすることができます。
他ノードから動的に変更する方法(Python)
以下Pythonノードからパラメータを動的に変更するサンプルプログラムです。
rvizからパラメータが変更されたことが確認しやすいようにLocalCostmapのinflation_layerのinflation_radiusの値を1秒ごとに交互に切り替えるプログラムを作成しました。
2行目でdynamic_reconfigure.clientをインポートし、6行目でClentを作成しています。
client.update_configureationの引数で変更したいパラメータ名と値を指定します。
以下スクリプトを実行するとinflation_radiusの値が1秒ごとに0.5と1.0に切り替わります。
import rospy
import dynamic_reconfigure.client
if __name__ == '__main__':
rospy.init_node("dynamic_reconfigure_client")
client = dynamic_reconfigure.client.Client("/move_base/local_costmap/inflation_layer/")
while not rospy.is_shutdown():
client.update_configuration({"inflation_radius": 0.5})
rospy.sleep(1)
client.update_configuration({"inflation_radius": 1.0})
rospy.sleep(1)
rospy.spin()
他ノードから動的に変更する方法(C++)
以下C++ノードからパラメータを動的に変更するサンプルプログラムです。動作は上と同様。
C++の場合、それぞれのConfigファイルをincludeしてくる必要がありました。
# include <ros/ros.h>
# include <dynamic_reconfigure/client.h>
# include "costmap_2d/InflationPluginConfig.h"
int main(int argc, char **argv){
ros::init(argc, argv, "dynamic_reconfigure_client");
dynamic_reconfigure::Client<costmap_2d::InflationPluginConfig> client("/move_base/local_costmap/inflation_layer/");
costmap_2d::InflationPluginConfig config;
while(ros::ok())
{
config.inflation_radius = 0.5;
client.setConfiguration(config);
ros::Duration(1).sleep();
config.inflation_radius = 1.0;
client.setConfiguration(config);
ros::Duration(1).sleep();
}
return 0;
}
実行結果
以下でTurtlebot3のNavigationを起動
$ roslaunch turtlebot3_navigation turtlebot3_navigation.launch
別のターミナルで上記サンプルプログラム(Python版)を実行 (Melodicの場合は "python sample.py")
$ python3 sample.py
以下rvizの画面(GlobalCostmapなどは非表示にしています)
inflation_radius : 0.5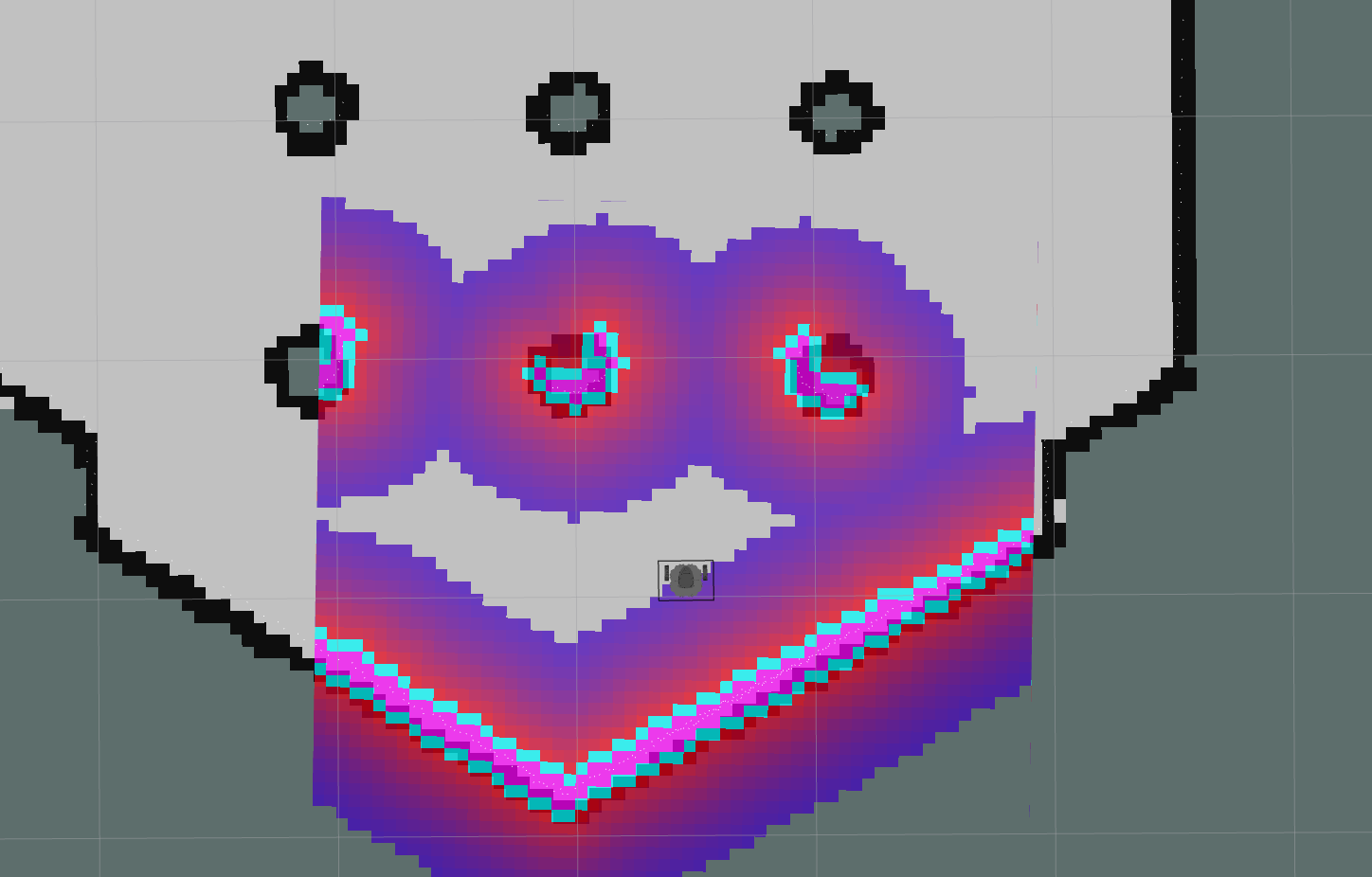
inflation_radius : 1.0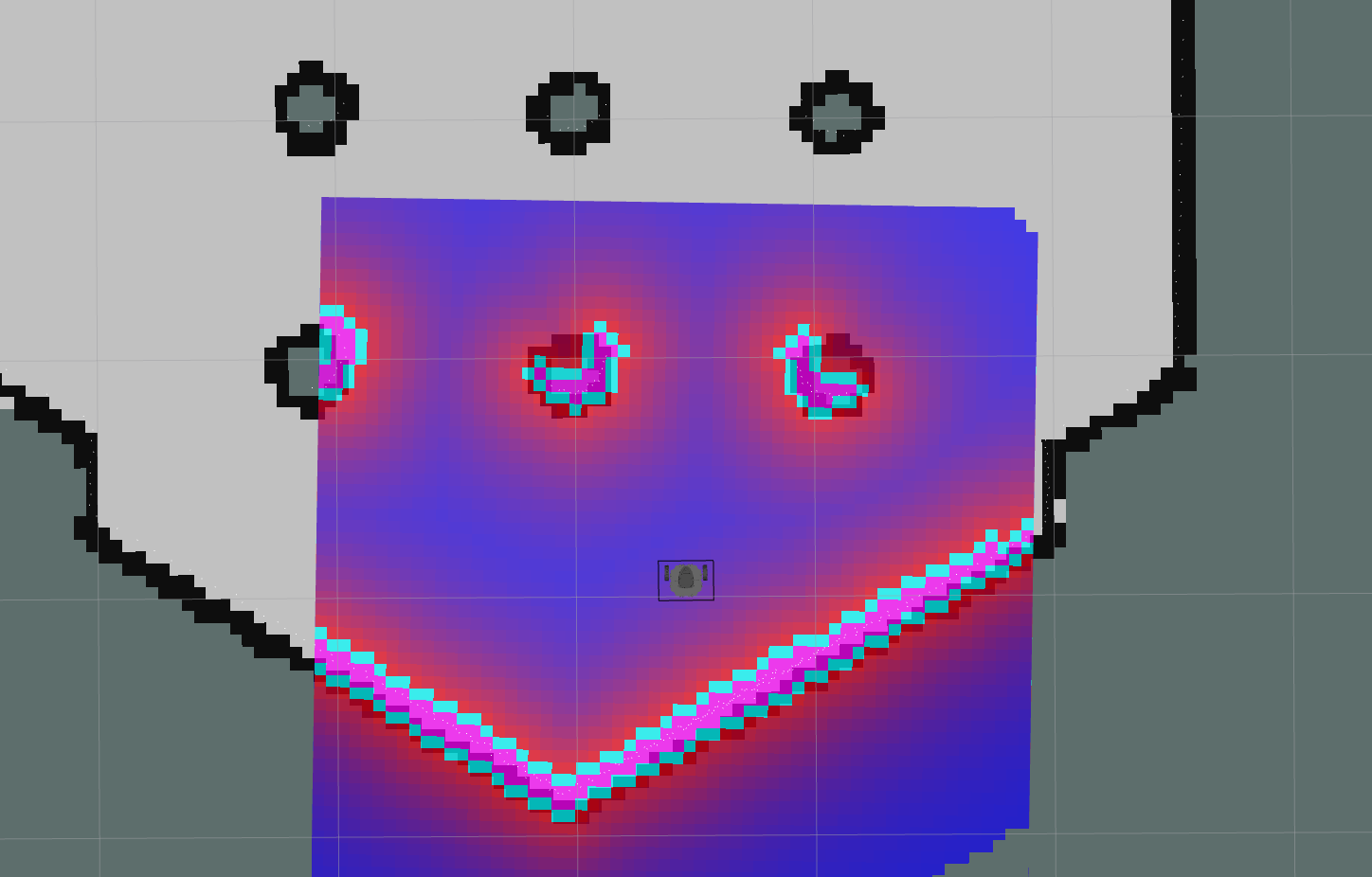
これら画面が1秒ごとに交互に切り替わっているかと思います。
最後に
今回はmove_baseのパラメータを変更する例を紹介しましたが、同様にamclのパラメータも動的に変更することが可能です。
またプログラムからパラメータを変更するサンプルはpythonで書きましたが、後日C++版も追記予定です。
追記:C++版のサンプルプログラムを追加しました。(2021/1/13)
追記:今回テスト用に作成したスクリプトを以下githubに上げました。(2021/1/31)
https://github.com/porizou/dynamic_reconfigure_test
参考
dynamic_reconfigureチュートリアル
http://wiki.ros.org/dynamic_reconfigure/Tutorials/UsingTheDynamicReconfigurePythonClient
How to dynamically reconfigure the hokuyo_node from the command line or code.
http://wiki.ros.org/hokuyo_node/Tutorials/UsingDynparamToChangeHokuyoLaserParameters
ROSのノードのパラメータをノード実行中に変更できるDynamic Reconfigure
http://urusulambda.com/2018/04/19/ros%E3%81%AE%E3%83%8E%E3%83%BC%E3%83%89%E3%81%AE%E3%83%91%E3%83%A9%E3%83%A1%E3%83%BC%E3%82%BF%E3%82%92%E3%83%8E%E3%83%BC%E3%83%89%E5%AE%9F%E8%A1%8C%E4%B8%AD%E3%81%AB%E5%A4%89%E6%9B%B4%E3%81%A7/