概要
ROS2でcartographerを動かす記事はいくつかあったがLocalizationまでやっていた記事はなかったので、マップ作成から自己位置推定に使用するまでの手順をまとめる。
基本的には使い方はROS1の場合と全く同じ。
動作確認にはTurtlebot3のGazeboシミュレーションを使用した。
動作確認環境
OS : ubuntu22.04LTS
ROS : ROS2 Humble
インストール
sudo apt install ros-humble-cartographer
foxyの場合
sudo apt install ros-foxy-cartographer
rviz2 プラグインのインストール(必要な場合)
sudo apt install ros-humble-cartographer-rviz
動作確認
ROS1 ではbackpack_2dデモ用のrosbagファイルがダウンロードできて、これを実行することで動作確認できていたがROS2のrosbag2版は存在しない。
以下の記事にbackpack 2dのrosbagファイル.bagをROS2のrosbagに変換してデモ実行する内容を書いたので、興味のある方は試してみてください。
Turtlebot3 Gazebo環境のインストール
Turtlebot3 ROS2 パッケージのインストール
あとでファイルを編集するのでaptからではなくワークスペースにダウンロードしてcolcon buildする。
foxyの場合はhumbleをfoxyに変える。(foxyでは動作未確認)
mkdir -p ~/ros2_ws/src && cd ~/ros2_ws/src/
git clone -b humble-devel https://github.com/ROBOTIS-GIT/turtlebot3.git
cd ~/ros2_ws/
source /opt/ros/humble/setup.bash
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
colcon build --symlink-install
Turtlebot3 Gazeboパッケージのインストール
cd ~/ros2_ws/src/
git clone -b humble-devel https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
cd ~/ros2_ws && colcon build --symlink-install
こちらは変更しないのでaptから入れてもよい
sudo apt install ros-humble-turtlebot3-simulations
Navigation2のインストール
この記事内ではmapの保存のためにmap_serverのみ使用する
sudo apt install ros-humble-navigation2
sudo apt install ros-humble-nav2-bringup
マップ作成とマップの保存
マップ作成からmap_saverでマップ保存までは以下のTurtlebot3 emanual Foxyのページの通り。ここではコマンドのみ記載。
turtlebot3のGazeboを起動
source ~/ros2_ws/install/setup.bash
export TURTLEBOT3_MODEL=burger
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
cartographerノード実行
source ~/ros2_ws/install/setup.bash
ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
teleop_twist_keyboardなどで適当にロボットを動かして地図を作成する
ros2 run teleop_twist_keyboard teleop_twist_keyboard
マップの保存
ros2 run nav2_map_server map_saver_cli -f ~/map
実行したディレクトリにmap.pgmとmap.yamlがあればOK
pbstreamファイルの保存
write_stateのServiceをCallしてpbstreamファイルを保存
filename に保存したいパスとファイル名を書く。
後述するNav2の自己位置推定にamclを用いる場合はこの手順は不要。
ros2 service call /write_state cartographer_ros_msgs/srv/WriteState "{filename: '/home/porizou/map.pbstream'}"
pure localization (自己位置推定)
cartographer は事前に作成したpbstreamファイルを読み込んで純粋な自己位置推定をすることができる。
(Simultaneous Localization and MappingのLocalizationのみ実行しているイメージ)
詳細は公式ドキュメントを参照。
launchファイルとluaファイルの作成
localization用にros2_ws/src/turtlebot3/turtlebot3_cartographer/configに新しく設定ファイルを作成
include "turtlebot3_lds_2d.lua"
TRAJECTORY_BUILDER.pure_localization_trimmer = {
max_submaps_to_keep = 3,
}
POSE_GRAPH.optimize_every_n_nodes = 20
return options
上の設定ファイルとpbstreamファイルを読み込むためcartographer.launch.pyを元にして新しくlaunchファイルを作成。
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch_ros.actions import Node
from launch.substitutions import LaunchConfiguration
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import ThisLaunchFileDir
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
turtlebot3_cartographer_prefix = get_package_share_directory('turtlebot3_cartographer')
cartographer_config_dir = LaunchConfiguration('cartographer_config_dir', default=os.path.join(
turtlebot3_cartographer_prefix, 'config'))
configuration_basename = LaunchConfiguration('configuration_basename',
default='turtlebot3_lds_2d_localization.lua')
resolution = LaunchConfiguration('resolution', default='0.05')
publish_period_sec = LaunchConfiguration('publish_period_sec', default='1.0')
rviz_config_dir = os.path.join(get_package_share_directory('turtlebot3_cartographer'),
'rviz', 'tb3_cartographer.rviz')
pbstream_path = "/home/porizou/map.pbstream"
return LaunchDescription([
DeclareLaunchArgument(
'cartographer_config_dir',
default_value=cartographer_config_dir,
description='Full path to config file to load'),
DeclareLaunchArgument(
'configuration_basename',
default_value=configuration_basename,
description='Name of lua file for cartographer'),
DeclareLaunchArgument(
'use_sim_time',
default_value='false',
description='Use simulation (Gazebo) clock if true'),
Node(
package='cartographer_ros',
executable='cartographer_node',
name='cartographer_node',
output='screen',
parameters=[{'use_sim_time': use_sim_time}],
arguments=['-configuration_directory', cartographer_config_dir,
'-configuration_basename', configuration_basename,
'-load_state_filename', pbstream_path]),
DeclareLaunchArgument(
'resolution',
default_value=resolution,
description='Resolution of a grid cell in the published occupancy grid'),
DeclareLaunchArgument(
'publish_period_sec',
default_value=publish_period_sec,
description='OccupancyGrid publishing period'),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([ThisLaunchFileDir(), '/occupancy_grid.launch.py']),
launch_arguments={'use_sim_time': use_sim_time, 'resolution': resolution,
'publish_period_sec': publish_period_sec}.items(),
),
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
output='screen'),
])
実行
turtlebot3のGazeboを起動
source ~/ros2_ws/install/setup.bash
export TURTLEBOT3_MODEL=burger
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
cartographerノード実行
source ~/ros2_ws/install/setup.bash
ros2 launch turtlebot3_cartographer cartographer_localization.launch.py use_sim_time:=True
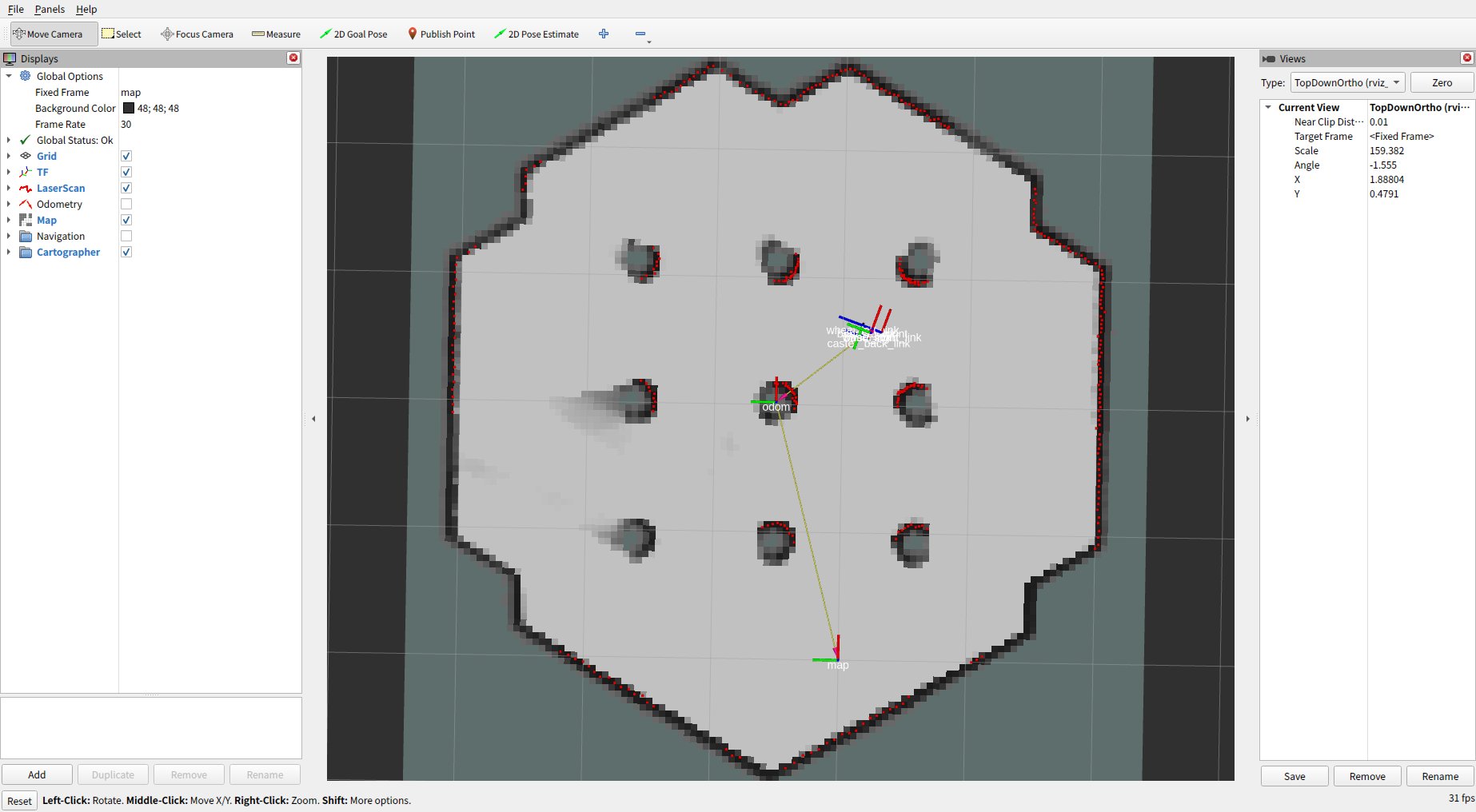
rviz2を見るとpbstreamファイルが読み込まれ、先程作成したmapが表示されていることが分かる。
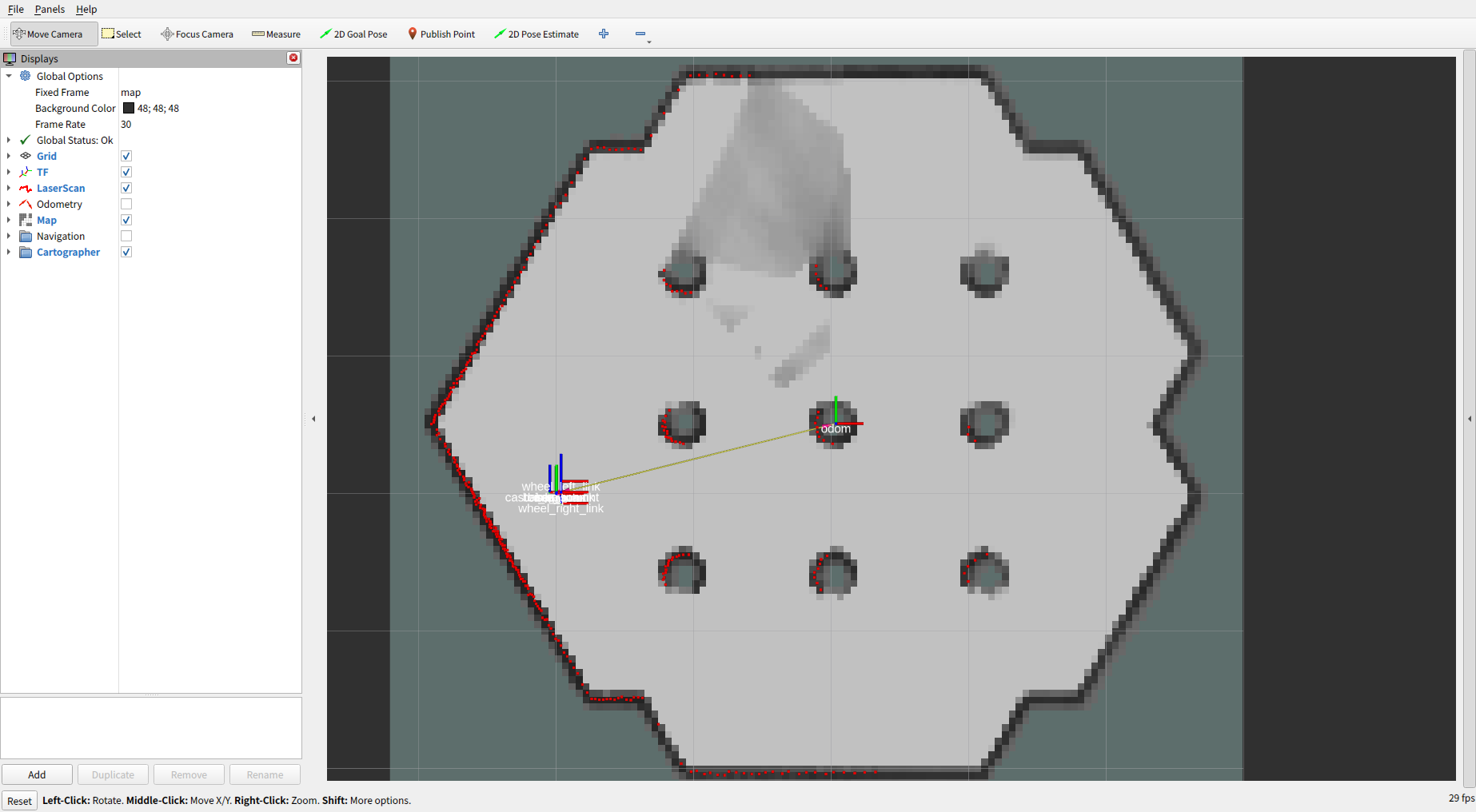
次に自己位置推定の動作確認
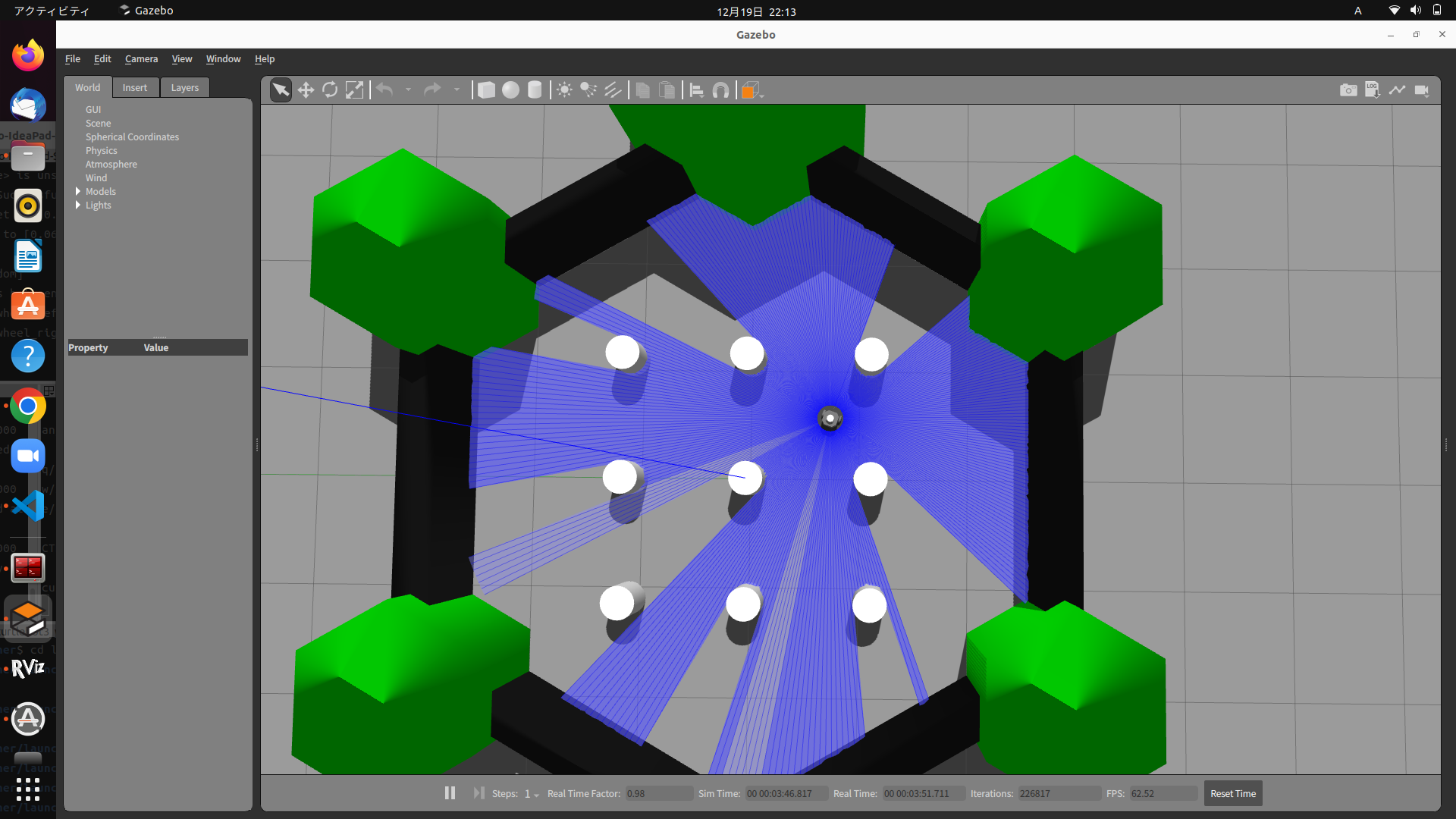
適当にTurtlebot3を動かしてGazeboのTurtlebot3の位置とrviz2のTF (base_link)の位置を比較して大体同じ位置にあればOK
rviz2画面 (90度回転させてます)
Gazebo画面
おわりに
この記事ではROS2環境においてcartographerの動作をTurtlebot3 Gazeboシミュレーションを使って動作確認しました。
本当は2D LiDARで実機を使用してやりたかったのですが、Localizationが思った通りに動きませんでした。
実物のLiDARとロボットを持っているかたはturtlebot3_gazebo起動部分を実機に置き換えて試してみてください。
次の記事ではcartographerをamclの代わりに自己位置推定ノードとして使用してNavigation2を動かしてみます。
次の記事
参考