はじめに
ROS2標準のSLAMパッケージであるslam-toolboxを使ってGazebo上でSLAMをする手順についてまとめました。
動作確認にはTurtlebot3シミュレーションパッケージを使います。
slam_toolboxについて
ROS2 DasingまではROS2標準のSLAMパッケージがcartographerでしたが、Eloquent以降slam_toolboxという新しいSLAMパッケージに変更されました。
slam_toolboxには以下のような特徴があります。
・Kartoアルゴリズムがベース
・ceres-solverによるICPスキャンマッチングとGraph-Based-SLAM
・オドメトリ必須
・手動で地図調整できるGUIツールがある
・SLAMデータを保存してLocalizationモードで使用できる
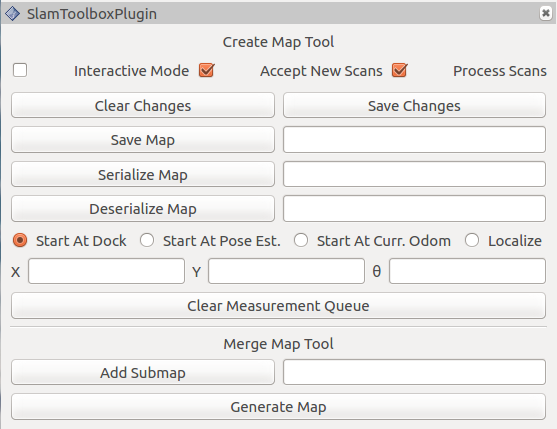
以下のようなrviz2プラグインを使って手動でループ閉じ込みできる点などが主な特徴です。
詳しくは以下のroscon2019の資料を参照してください
実行環境
この記事は以下の環境で動かしています。
| 項目 | 値 |
|---|---|
| CPU | Ryzen5 |
| OS | Ubuntu20.04.02LTS |
| ROS2 | Foxy Fitzroy |
Install
slam_toolboxのインストール
以下を実行
$ sudo apt install ros-foxy-slam-toolbox
以下ソースからビルドする場合(推奨)
$ cd ~/ros2_ws/src
$ git clone https://github.com/SteveMacenski/slam_toolbox.git
$ cd slam_toolbox/
$ git checkout foxy-devel
$ cd ~/ros2_ws
$ colcon build
Navigation2とTurtlebot3シミュレーションパッケージのインストール
Navigation2とTurtlebot3のGazeboシミュレーション環境は以下の記事にしたがってインストール
ROS2 Foxy環境にTurtleBot3のGazeboシミュレーションをインストールしてNavigation2を動かすまで
地図の作成
Turtlebot3 Simulationパッケージの実行
とりあえず環境はTurtlebot3 worldを使用
$ ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
Teleop用に/cmd_velをPublishするノードを起動
ここはGazebo上のTurtlebot3を操作できればteleop_twist_joyでも何でもいいです。
ros2 run teleop_twist_keyboard teleop_twist_keyboard
slam_tool_boxノードを起動
async_slam_toolbox_nodeとsync_slam_toolbox_nodeの2種類があるがasyncの方を使用(違いは調査中)
onlineで実行するときはasyncを使えばいいらしい
ros2 launch slam_toolbox online_async_launch.py
作成中の/mapトピックを見るためにrviz2を起動
rviz2
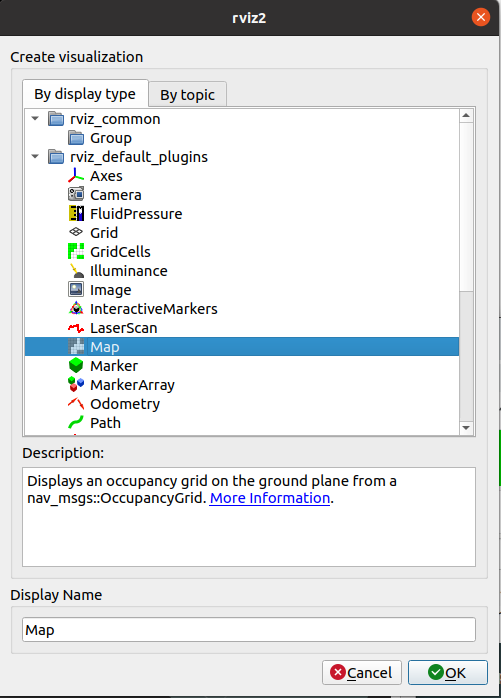
左下のAddからMapを選択してOKをクリック
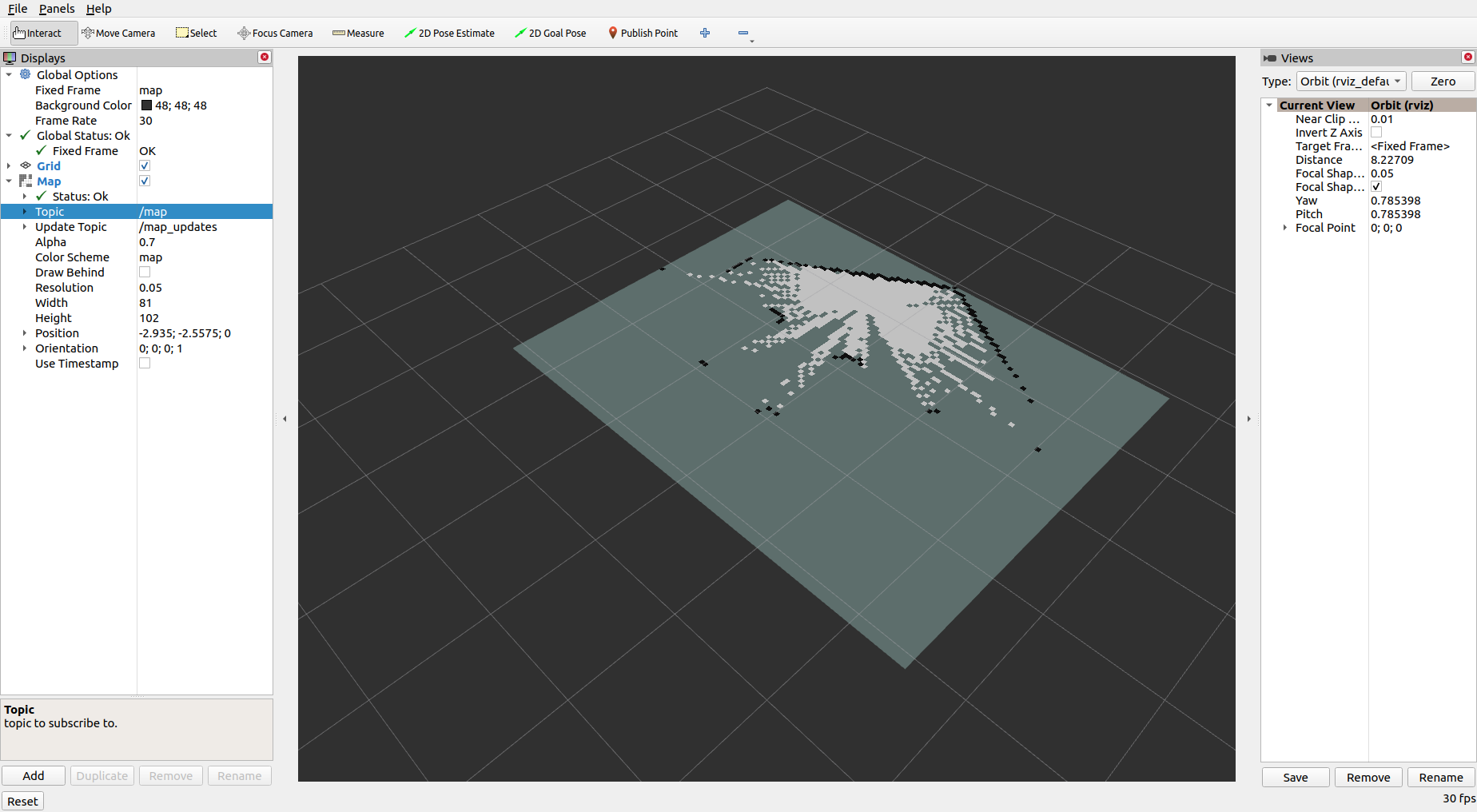
Topicからトピック名/mapを入力
以下のように現在の/mapが表示される
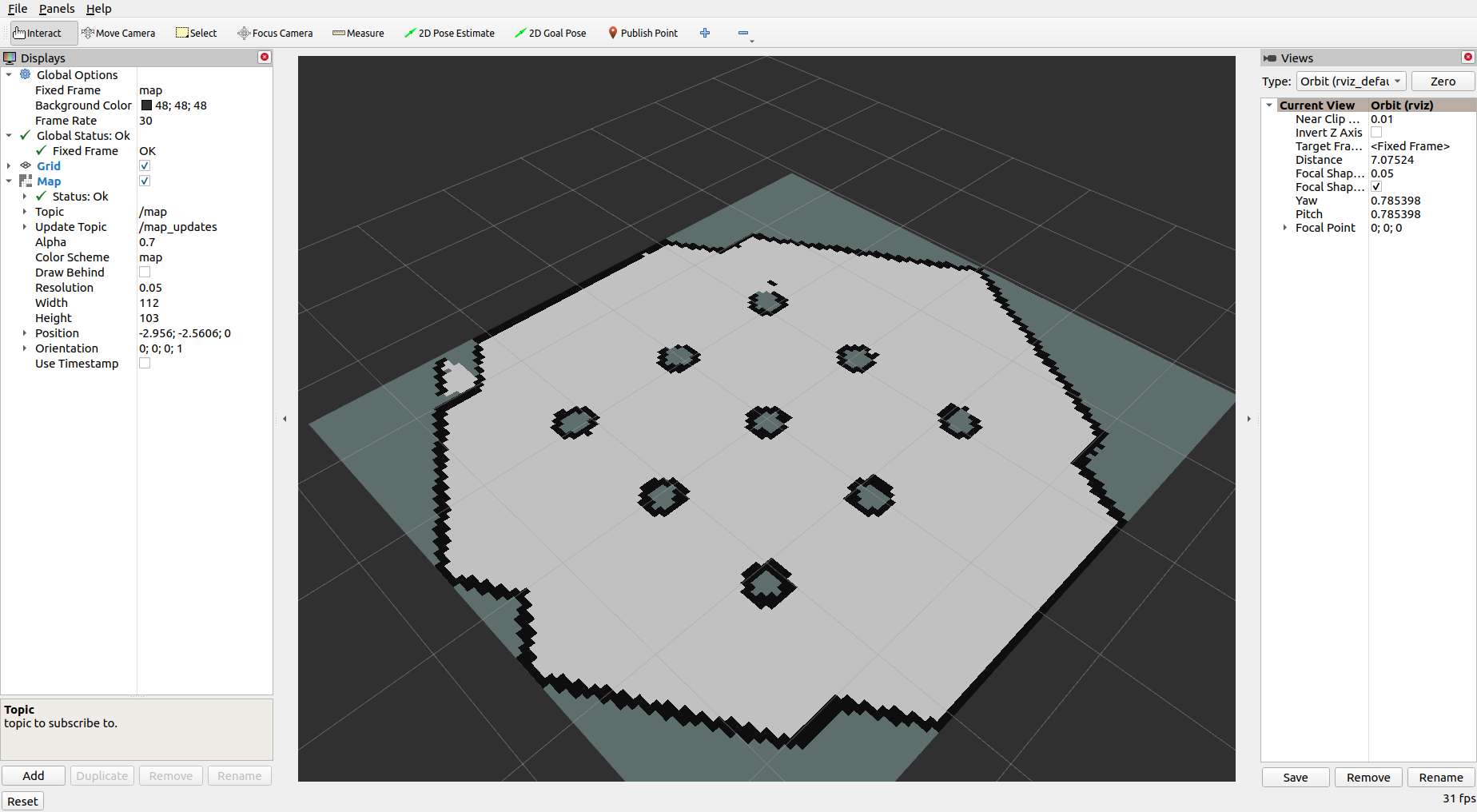
/cmd_velを送ってTurtlebot3を動かすとrviz2画面のmapが更新される
(/mapトピックの更新がやたら遅いのは調査中)
地図の保存
ある程度全体のmapが出来上がったらNavigation2のnav2_map_serverパッケージのmap_saverを使用して作成した地図を保存します。
以下でmapの保存
$ ros2 run nav2_map_server map_saver_cli -f ~/map
[INFO] [1618829845.625503871] [map_saver]:
map_saver lifecycle node launched.
Waiting on external lifecycle transitions to activate
See https://design.ros2.org/articles/node_lifecycle.html for more information.
[INFO] [1618829845.625745924] [map_saver]: Creating
[INFO] [1618829845.626007161] [map_saver]: Saving map from 'map' topic to '/home/porizou/map' file
[WARN] [1618829845.626031354] [map_saver]: Free threshold unspecified. Setting it to default value: 0.250000
[WARN] [1618829845.626052861] [map_saver]: Occupied threshold unspecified. Setting it to default value: 0.650000
[WARN] [map_io]: Image format unspecified. Setting it to: pgm
[INFO] [map_io]: Received a 112 X 103 map @ 0.05 m/pix
[INFO] [map_io]: Writing map occupancy data to /home/porizou/map.pgm
[INFO] [map_io]: Writing map metadata to /home/porizou/map.yaml
[INFO] [map_io]: Map saved
[INFO] [1618829847.259541041] [map_saver]: Map saved successfully
[INFO] [1618829847.259661983] [map_saver]: Destroying
/homeディレクトリ以下にmap.pgmとmap.yamlが生成される。
map.pgm
image: map.pgm
mode: trinary
resolution: 0.05
origin: [-2.96, -2.56, 0]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.25
yamlファイルの内容はROS1と同じ。
上からimage:イメージファイル、mode:モード、resolution:解像度、origin:原点座標、negate:白黒反転させるかどうか、occupied_thresh:これより大きい場所が障害物、free_thresh:これより小さい場所がフリースペース。
作成した地図を使ってNavigationをする
次は作成した地図を使ってNavigation2でNavigationをします。
~/turtlebot3_ws/src/turtlebot3/turtlebot3/turtlebot3_navigation2/mapディレクトリ以下に先程作成したmap.pgmとmap.yamlをコピー
Turtlebot3シミュレーションを起動
$ ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
Navigation2を起動
$ ros2 launch turtlebot3_navigation2 navigation2.launch.py
rviz2ウィンドウ上の2D Pose Estimateをクリック、map上の現在いる位置をクリックしてロボットの初期位置を設定
Navigation2 Goalをクリック
移動させたい位置と姿勢をrviz2画面をクリックしてゴールを指定
Gazebo上のTurtlebot3が動いてゴールに到着すれば成功
おわりに
次はslam_toolboxをlocalizationモードで動かしてNavigation2のmap_serverとamclの代わりに使用してNavigationを行います。
参考
最新のROS実装のあるLidarSLAMオープンソースソフトウェアまとめ
https://qiita.com/rsasaki0109/items/493c1059ffe3178166bc