はじめに
製作中のゲームのCOM処理が重くなってきたので、以前から気になっていたJobSystemに手を出してみました。
JobSystemで、大量のオブジェクトをマルチスレッドで処理する記事は結構見つかるのですが、重めの処理をJobSystemにやってもらう情報は見つからず…。手探りでしたが、マルチスレッド化には成功したので知見をまとめてみました。
開発環境
Unity : Unity 2018.2.3f1
OS : Windows 10 Pro
CPU : Intel Core i7-8700K(6コア12スレッド)
作ったもの
実行プロジェクト
https://github.com/Piorimu/JobSystemRouter
COMがいくつかの目的地を選ぶような場面を想定して、以下のような処理を作ってみました。
40x40の格子状のマップに1~10の移動コストを設定します。
マップに10個の目的地と開始地点を設定し、開始地点から各目的地までの経路探索をジョブシステムで並列化してみました。
結果
まず、メインスレッドだけで経路探索をした場合…
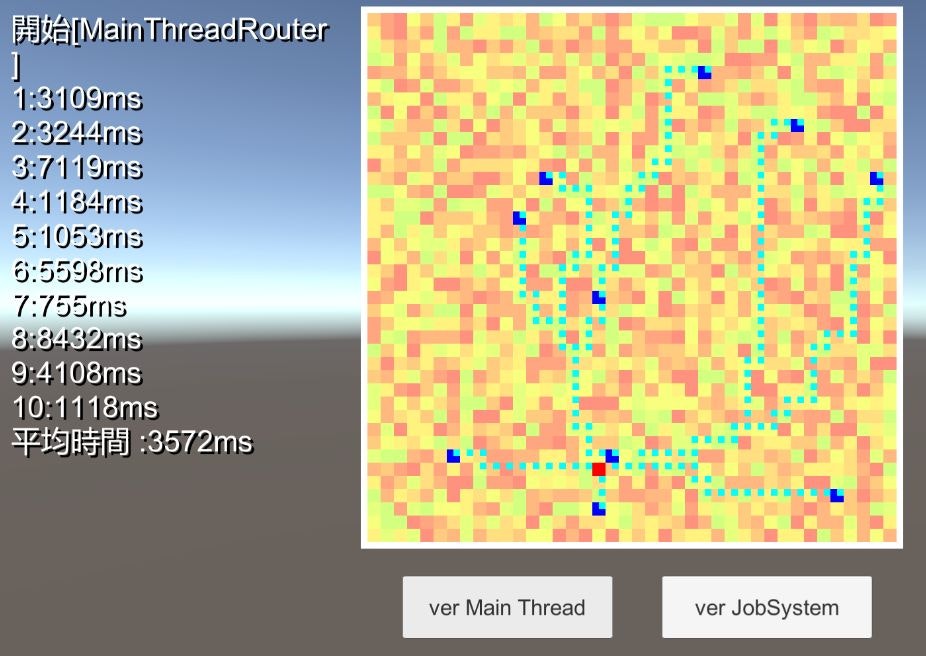
およそ3秒。
そして、JobSystemで並列化した場合…
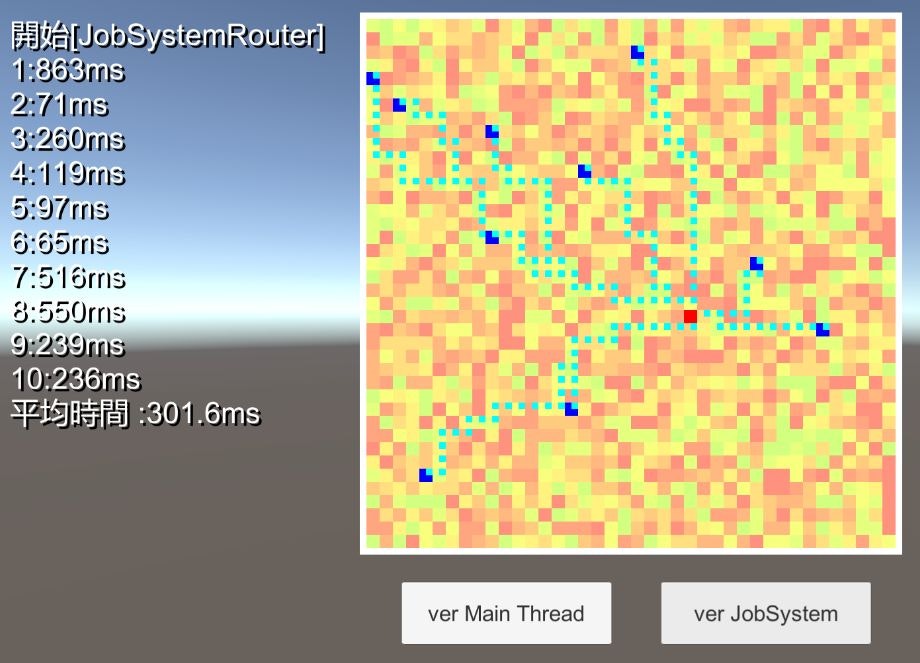
0.3秒でおよそ10分の1に!
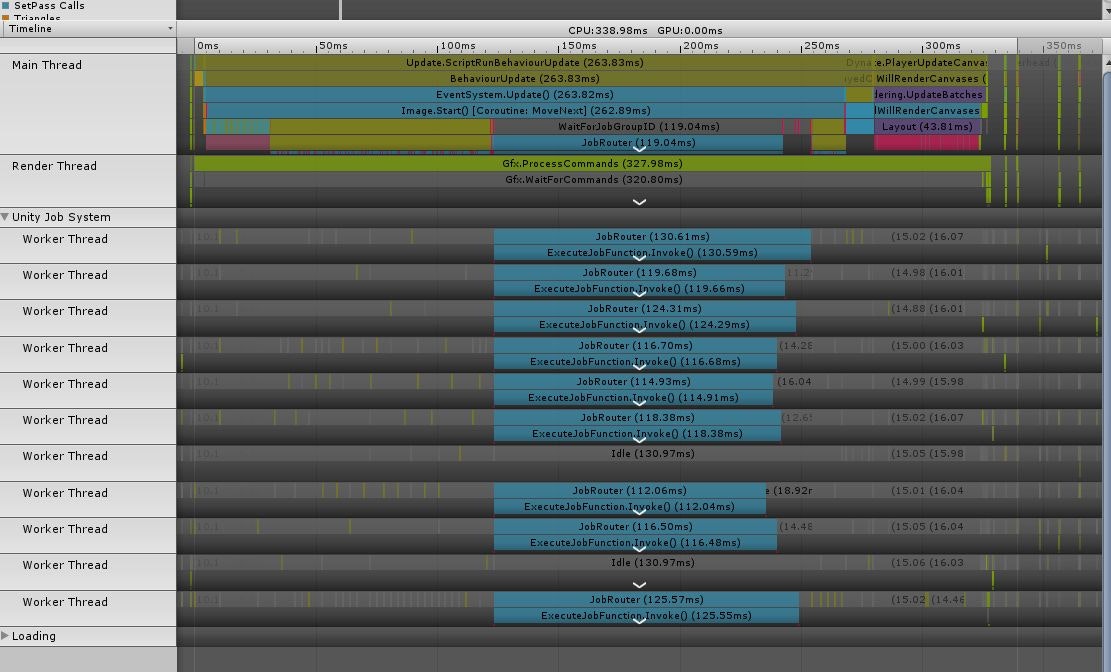
Profilerのタイムラインで確認すると、10ジョブを12スレッドに割り振って、各経路探索を各スレッドで処理されていることが確認出来ます。
ソースコード
JobSystemで経路探索を行ったコードは以下の通り。
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.Jobs;
using Unity.Collections;
/// <summary>
/// 経路探索ジョブ
/// </summary>
public struct JobRouter : IJob
{
const int STATUS_FREE = 0; //!< 未探索
const int STATUS_OPEN = 1; //!< オープン
const int STATUS_CLOSE = 2; //!< クローズ
// 配列確保数でも使うのでpublic
public const int MAX_WALKS = 1000;
const int MAX_TRIES = 100000;
/// <summary>
/// ノード
/// </summary>
struct Node
{
public int status; //!< 状態
public int parentIndex; //!< 親の座標インデックス
public int cost; //!< コスト
public int heuristic; //!< ヒューリスティックコスト
//! スコア計算プロパティ
public int score
{
get { return cost + heuristic; }
}
}
//! フィールド配列
[ReadOnly] // 共有する配列には、[ReadOnly]が必要
public NativeArray<int> costs;
//! フィールドサイズ
public Vector2Int fieldSize;
//! スタート地点
public Vector2Int start;
//! ゴール地点
public Vector2Int goal;
//! 経路出力配列
public NativeArray<Vector2Int> resultPath;
//! 歩数出力配列
public NativeArray<int> resultWalks;
/// <summary>
/// 経路探索
/// </summary>
public void Execute()
{
// ジョブ内での確保は出来る
Node[] nodes = new Node[ fieldSize.x * fieldSize.y ];
// スタートとゴールをマーク
int start_index = Utility.ToIndex( start, fieldSize.x );
int goal_index = Utility.ToIndex( goal, fieldSize.x );
nodes[ start_index ].status = STATUS_OPEN;
nodes[ goal_index ].parentIndex = -1;
int tries = 0;
for ( ; tries < MAX_TRIES; tries++ )
{
// 最小スコアのノードを選択
int node_index = -1;
int min_score = int.MaxValue;
for ( int i = 0; i < fieldSize.y * fieldSize.x; i++ )
{
// 開いていないならスキップ
if ( nodes[ i ].status != STATUS_OPEN )
{
continue;
}
// よりスコアが低いノードを選択
if ( nodes[ i ].score < min_score )
{
node_index = i;
min_score = nodes[ i ].heuristic;
}
}
// 開いたノードがなかった
if ( node_index == -1 )
{
break;
}
OpenNode( nodes, node_index );
}
if ( tries == MAX_TRIES )
{
Debug.Log( "最大試行数到達" );
}
// ゴールにたどり着けず
if ( nodes[ goal_index ].parentIndex == -1 )
{
resultWalks[ 0 ] = -1;
return;
}
// ルート作成
Vector2Int[] buffer_path = new Vector2Int[ MAX_WALKS ];
int walks = 0;
// ゴールからスタートまでの道のりをたどる
for ( int index = goal_index; index != start_index; index = nodes[ index ].parentIndex )
{
buffer_path[ walks ] = Utility.ToPosition( index, fieldSize.x );
walks++;
}
// 逆からたどればスタート→ゴール
for ( int i = 0; i < walks; i++ )
{
resultPath[ i ] = buffer_path[ walks - i - 1 ];
}
resultWalks[ 0 ] = walks;
}
/// <summary>
/// ノードオープン
/// </summary>
/// <param name="field"></param>
/// <param name="nodes"></param>
/// <param name="node_index"></param>
/// <param name="goal"></param>
void OpenNode( Node[] nodes, int node_index )
{
// 添字から座標に
Vector2Int center = Utility.ToPosition( node_index, fieldSize.x );
int center_cost = nodes[ node_index ].cost;
int center_score = nodes[ node_index ].score;
for ( int i = 0; i < Utility.Direction.Length; i++ )
{
Vector2Int open_position = center + Utility.Direction[ i ];
if ( Utility.IsOut( open_position, new Vector2Int( fieldSize.x, fieldSize.y ) ) )
{
continue;
}
// コスト計算
int cost = costs[ Utility.ToIndex( open_position, fieldSize.x ) ] + center_cost + 1;
int heuristic = System.Math.Abs( goal.x - open_position.x ) + System.Math.Abs( goal.y - open_position.y );
int score = cost + heuristic + 1;
int next_index = Utility.ToIndex( open_position, fieldSize.x );
if ( nodes[ next_index ].status == STATUS_FREE || nodes[ next_index ].score > score )
{
nodes[ next_index ].status = STATUS_OPEN;
nodes[ next_index ].cost = cost;
nodes[ next_index ].heuristic = heuristic;
nodes[ next_index ].parentIndex = node_index;
}
}
nodes[ node_index ].status = STATUS_CLOSE;
}
}
/// <summary>
/// 経路探索ジョブテスト
/// </summary>
public class JobSystemRouter : IRouter
{
public Route[] FindPath( Field field, Vector2Int start, Vector2Int[] goals )
{
// ゴールの数だけジョブを回す
JobHandle[] job_handles = new JobHandle[ goals.Length ];
NativeArray<Vector2Int>[] result_paths = new NativeArray<Vector2Int>[ goals.Length ];
NativeArray<int>[] result_walks = new NativeArray<int>[ goals.Length ];
// フィールドのコストをNativeArrayに
NativeArray<int> field_cost = new NativeArray<int>( field.size.x * field.size.y, Allocator.Temp );
for( int i = 0; i < field.size.x * field.size.y; i ++ )
{
field_cost[ i ] = field.GetCell( Utility.ToPosition( i, field.size.x ) );
}
for( int i = 0; i < goals.Length; i ++ )
{
result_paths[ i ] = new NativeArray<Vector2Int>( JobRouter.MAX_WALKS, Allocator.Temp );
result_walks[ i ] = new NativeArray<int>( 1, Allocator.Temp );
// ジョブを作成
var job_router = new JobRouter()
{ // コンストラクタで各種情報を設定
costs = field_cost,
fieldSize = field.size,
goal = goals[ i ],
start = start,
resultPath = result_paths[ i ],
resultWalks = result_walks[ i ],
};
// ジョブをスケジュール
job_handles[ i ] = job_router.Schedule();
}
// ジョブを開始
JobHandle.ScheduleBatchedJobs();
// 順番に経路探索ジョブを待って、結果を作成
Route[] results = new Route[ goals.Length ];
for( int i = 0; i < goals.Length; i ++ )
{
// ジョブ待ち
job_handles[ i ].Complete();
// 結果をルートに変換
var route = new Route();
route.path = new Vector2Int[ result_walks[ i ][ 0 ] ];
for( int j = 0; j < route.path.Length; j ++ )
{
route.path[ j ] = result_paths[ i ][ j ];
}
results[ i ] = route;
result_paths[ i ].Dispose();
result_walks[ i ].Dispose();
}
field_cost.Dispose();
return results;
}
}
JobSystemについて
基本的なことは、以下の記事が分かりやすかったです。
ECSとJobSystem 基礎 - しゅみぷろ
http://esprog.hatenablog.com/entry/2018/05/19/150313
流れをざっとまとめると
- IJobを継承したジョブ構造体を作る
- ジョブ構造体に処理を書く
- 呼び出し側は、ジョブで使うデータを用意する
- ジョブ構造体をnewして必要なデータを設定する
- job.Schedule()
- job_handle.Complete()
- 結果をよしなにする
ハマった・ハマりそうなところ
結果を受け取るにはNativeArray
カウンターのような配列ではない処理結果を受け取りたい場合は、要素数1のNativeArrayを使います。
【Unity】C# Job Systemを自分なりに解説してみる - テラシュールブログ
http://tsubakit1.hateblo.jp/entry/2018/03/04/223804#%E4%B8%80%E3%81%A4%E3%81%AE%E3%82%B8%E3%83%A7%E3%83%96%E3%82%92%E7%99%BA%E8%A1%8C%E3%81%99%E3%82%8BIJob
可変長な経路をどう受け取るか
目的地によって経路の長さは変わりますが、NativeArrayは固定長の配列なので、経路探索結果に応じて配列のサイズを変えられません。
これはしょうがないので、多めに配列を確保して、経路を受け取るようにしました。また、経路の長さは別にカウントすることで、配列のどこまでが経路かを判定します(番兵でも良かったかも)
共有する配列には、ReadOnly属性をつける
付け忘れると、エラーが出て怒られます。
例えば、今回のJobSystemRouterだと、共有するフィールドのコスト配列にReadOnly属性を付け忘れると、以下のようなエラーが出ます。
InvalidOperationException: The previously scheduled job JobRouter writes to the NativeArray JobRouter.costs. You are trying to schedule a new job JobRouter, which writes to the same NativeArray (via JobRouter.costs). To guarantee safety, you must include JobRouter as a dependency of the newly scheduled job.
IJob vs IJobParallelFor
今回はIJobを使いました。
当初は、目的地の数だけIJobParallelForで回そうとしましたが、経路の座標配列をどうやって受け取るか分からなかったので、諦めてIJobに。
あとがき
目的地毎にジョブを回していますが、経路が被っている分の計算が勿体ないので、こちらをまず何とかしたほうが良さそう。
ただ、その場合は今回のように各スレッドでAをそれぞれ回すのではなく、Aの中身であるノード処理を並列化する必要があります。
A*の並列化について調べたら、以下のようなアルゴリズムが考案されているようです。
HDA*: Hash Distributed A*
https://qiita.com/DINDIN92/items/0bc6b76a47b36f0590ae
流し読みした程度ですが、ハッシュでスレッドとノードを対応させて並列化するイメージでしょうか。
あとGitHubにUnityのプロジェクト上げるのすっごい簡単になってて驚き。Unityは勝手にForceTextにしてるし、GitHubはUnity向けの.gitignore用意してある…。
参考リンク
ECSとJobSystem 基礎 - しゅみぷろ
http://esprog.hatenablog.com/entry/2018/05/19/150313
【Unity】C# Job Systemを自分なりに解説してみる - テラシュールブログ
http://tsubakit1.hateblo.jp/entry/2018/03/04/223804
C# Job System Cookbook
https://github.com/stella3d/job-system-cookbook