よくわからないバグ?があるので誰かおしえてくださいという話です.
前提:複数台のデバイスでのROSの通信
masterとclientの2台のマシンがあるとする.
2台の間で1つのrosmasterを用意して相互にデータをやりとりする.
やるべきこと@ROS側
公式の説明によるとROS_MASTER_URIを設定するとあるが,これは若干舌足らずであり,ここの質疑にあるようにROS_IPも設定しなければならない.(ROS_HOSTNAMEもあったほうが良さそう.)
なお,スクリプトで自動化した人もいる.
master側の設定
ROSのmasterは随時変更したいので自分は接続先により以下のようなシェルスクリプトを組んでいる.
以下のスクリプト内のmasterには172.16.XX.XXXのようなmasterのIPアドレスが入ることに注意.
# !usr/bin
export ROS_MASTER_URI=http://master:11311
export ROS_HOSTNAME=`hostname -I`
export ROS_IP=`hostname -I`
client側での設定
クライアント側も同様.
# !usr/bin
export ROS_MASTER_URI=http://master:11311
export ROS_HOSTNAME=`hostname -I`
export ROS_IP=`hostname -I`
PCの設定:/env/hosts の編集
両者の/env/hostsを編集して
以下のような項を入れることでmasterと打つことでIPアドレスをうつかわりになる.
XXX.XXX.XXX.XXX master
YYY.YYY.YYY.YYY client
しかし,複数台でROS_MASTERを共有する際にはこれらをすべて整理するのが非常に面倒なので極力省きたいと思っている.(これが前提)
本題:/etc/hosts を設定せずに通信したらどうなるか
上記のmasterとclientの設定をsourceで実行した後,masterとclient間のデータ通信を確認する.
master側からの操作
- roscoreまたは適当なroslaunchを実行
適当にturtlebotを実行.
roslaunch turtle_tf2 turtle_tf2_demo.launch
client側からの操作
- roscoreが立ち上がったのを確認した後,適当なプログラムを実行
カメラを繋いで起動する.
roslaunch usb_cam usb_cam-test.launch
結果
- masterからもclientからも
rostopic listでリストが見れる. - clientからmasterのpublishしたデータが見れる(/tfの中身が見れた)
- masterからclientのpublishしたデータは見れない(カメラの映像は見れない)
つまるところmasterがclientの情報を見れないという状況に陥る.
んで,この情報についてざっと見てたどり着かない(一部のアプリケーションでは困らないかもだが)ので解決が待たれる.
データが見れないとはどういう状況か
つまりはこういうこと.なぜだ.
-
rostopic hzでno messageと出る. - image_viewで何も表示できない.(もちろんclient側からは見れる)
rqt_graphによる状況の図示
master側からのrqt_graphがこれ

client側からのがこれ
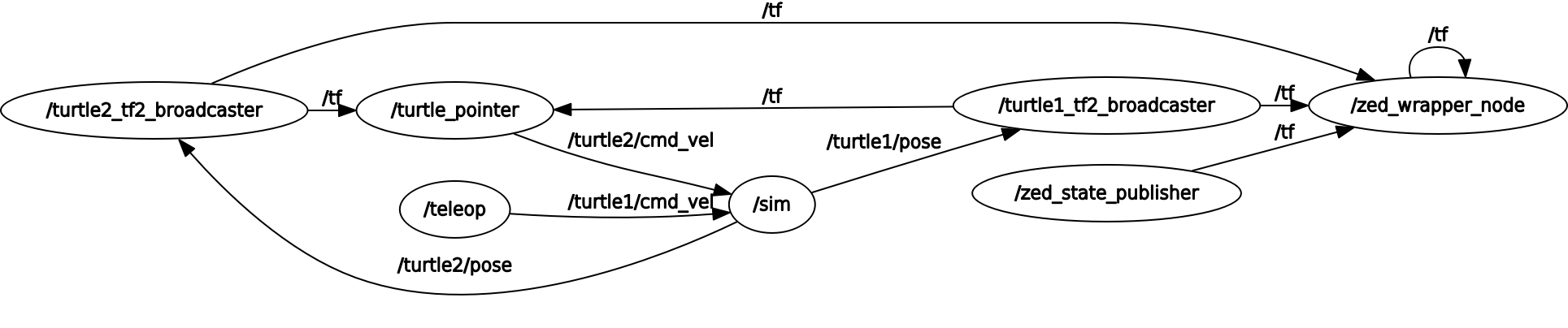
usbカメラって言ったけどzed_wrapperを走らせてます.
見ての通り,masterのrqtgraphにはclient側からのzed〜〜という名のnodeが見れない.そういうこと.
解決と考察(要編集)
ケーススタディです.
解決したケース:hostname -Iのかわりにアドレス直打ち
Dockerなどを使っているとhostname -Iで複数のIPアドレスを返すことがある.
その場合上記の書き方は良くないとここの質疑へのコメントであるが真偽は不明.
今回の上記のケースではhostname -Iに謎のIPが紛れていたので(2つあった)このようにしたらうまく行った.
解決したケース:/etc/hostsを設定する
master側がclient側からの情報を見れていないのでmaster側の/etc/hostsの設定をする.(ていうかどっちもやった)
→ 解決した場合があった
あくまで場合が合った.これは他の人のPCと通信した時に起きたので再現不能.(今深夜なので)
考察:netcatを用いた確認
pingが通るのは当たり前である必要が有るが,pingが通っていてもROSの通信がダメな場合が有る.
ここの公式の手順を試してみるのもあり.http://wiki.ros.org/ja/ROS/NetworkSetup
関連するかもしないかもな事象
- ファイヤウォールの設定を替えるとうまく行ったり行かなかったりとかがあるらしい.
- ROSが諸々の変更を反映するためにはdevel以下のsetup.bashを実行したほうがいいのかもしれない?(実際うまく行った時は/etc/hostsを設定した後にsetup.bashを実行している.その後/etc/hostsは戻したけど.)
結論(2018/5/31現在)
つまるところ,
- ROS_MASTER_URI,ROS_IP,ROS_HOSTNAMEを適切に設定すれば/etc/hostsの設定はなくても良さそう? (エラーの状況によっては当然試すべき選択肢の一つになるが.)
- hostnameが複数のIPを所持している場合は要注意
謎
- 他の人のPCと実験した時もclientの情報をmasterから確認できない事象があった.
もう少し根が深い問題かもしれない(有識者のアドバイスを求む) - ここに記述していない要素が絡んでいる可能性?