やったこと
- RaspberryPi Mouseの環境設定
- 動作確認
イメージを入れる
SDカードにUbuntuMateのイメージをいれるところから。
このへんを参考に。
Wifiへの接続
WPA2に接続する方法はここにあるが,今回はUbuntu MateのGUIで接続したので余裕でした。
Raspbianを使っていた際には結構苦労した記憶。
Chromeの導入
updateの後に何故かFirefoxが動かなくなったのでChromeを導入
sudo apt-get install chromium-browser
なんかやたら起動に時間掛かる…
ROS Kineticのインストール
以下の記述を参考にROS Kineticをインストール
公式
はRaspbianなので若干不安だったがubuntu mate版での記事もあったのでこちらを参照。
とりあえずcatkin_wsを作って一通りコマンドが通ることを確認。
RaspiMouseのセットアップ
出版社のGitHubをもとにセットアップを進めます。
公式ページをまずは熟読しましょう。
ROSパッケージはこちら。
GithubからのCloneのドライバインストール
git clone https://github.com/rt-net/RaspberryPiMouse.git
cd RaspberryPiMouse/utils
./build_install.ubuntu14.bash
エラーが出なかった場合は次の項目頭まで飛ばしてください。
なお,UbuntuMateではなんかエラーが出ました。(2018年5月)
uname -rの結果4.4.38-v7+を得たので'lib/Pi2B+'を見ていきます。
なんと困ったことに4.4.35-v7+と4.4.39-v7+しか見つかりません。
まぁ妥協して一歩古い方を入れます。
cd RaspberryPiMouse/lib/Pi2B+/4.4.35-v7+/
### install the kernel object
$ sudo insmod rtmouse.ko
SPIをEnableする
sudoでraspi-configを呼び,Configウインドウを呼びます。
「3番」の入出力の設定でSPIをOnにします。
これだけ。
ラズパイマウス用 ROSパッケージの導入
ここのパッケージを説明通りにインストールします。
ドライバのセットアップ
ドライバの設定とデバイスへのアクセス権限を入手します。
sudo insmod ~/RaspberryPiMouse/lib/Pi2B+/4.4.35-v7+/rtmouse.ko
sudo chmod 666 /dev/rt*
タイヤを回す
以下のようなコマンドでモータドライバを有効化できる。0を入力すると無効にできる。
echo 1 > /dev/rtmotoren0
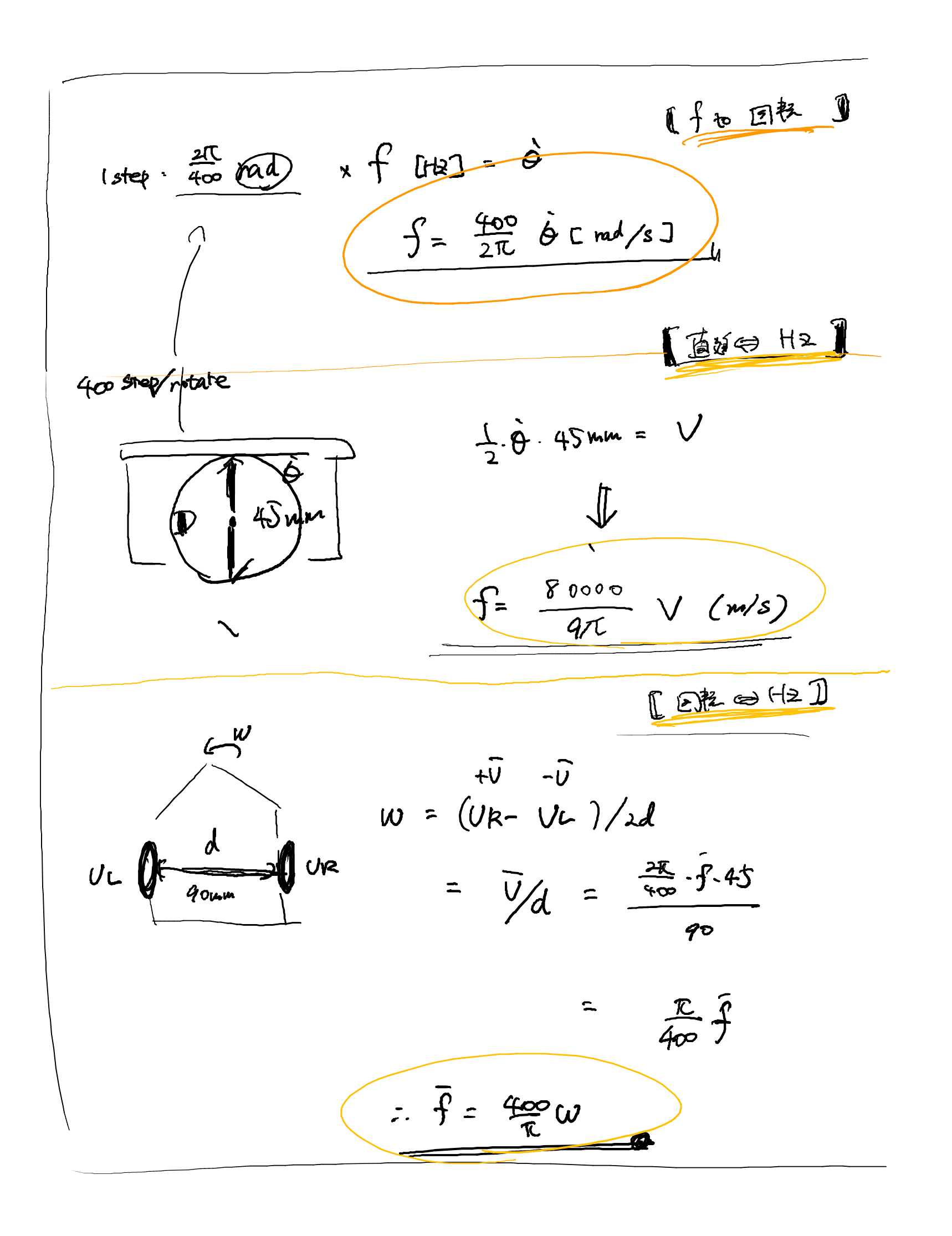
周波数$f$を入れることでモータを回転させることができる。$\dfrac{f*2\pi}{400} [rad/s]$の回転数で回る。
echo 100 > /dev/rtmotor_raw_l0
一応計算式などをぶち込んでおく。上田先生のプログラムとも矛盾はないはず。
エラーメモ
apt-get のエラー
apt-getで以下のエラーが発生
E: Could not get lock /var/lib/dpkg/lock - open (11: Resource temporarily unavailable)
E: Unable to lock the administration directory (/var/lib/dpkg/), is another process using it?
次のサイトが参考になった。
最終手段らしいが以下のコマンドをうつ。
sudo rm /var/lib/apt/lists/lock
sudo rm /var/cache/apt/archives/lock
## 上記のみでダメなら下も実行してみる。
sudo rm /var/lib/dpkg/lock
sudo dpkg --configure -a