mblock3 ottodiy 簡易サンプル
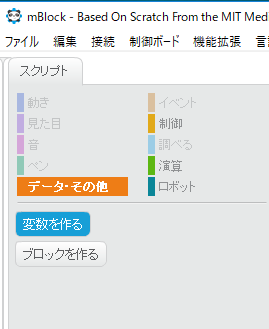
前提:mblock3 メニューの"編集"-"Arduinoモード"を選択、メニュー言語=日本語
0. 使用するブロック
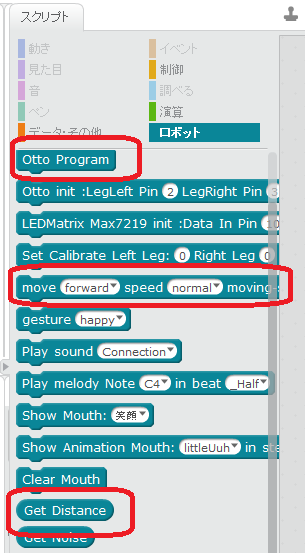
1. "ロボット"ライブラリ
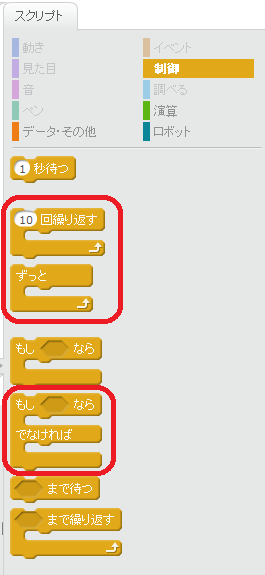
2. "制御"ライブラリ
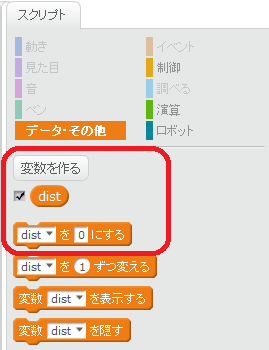
3. "データ・その他"ライブラリ
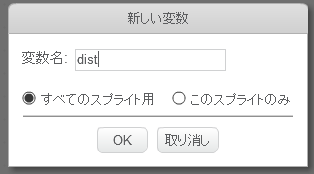
(下図では"dist"という変数名を指定)
1. 変数の作成
"データ・その他"ライブラリを選択、"変数を作る"をクリック
変数名を入力し、OKをクリック
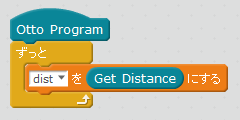
2. 距離検出ループ処理の作成
スクリプトタブの"ロボット"ライブラリから"Otto Program"ブロックを、"制御"ライブラリから"ずっと"ブロックを配置する。
そして、"データ・その他"ライブラリから"~を0にする"ブロックを"ずっと"ブロックの間に配置する

3. 超音波センサ値を2で作成した変数に代入
"ロボット”ライブラリの"Get Distance"ブロックを下図のように
「distを0にする」の0部分にドラッグ&ドロップする
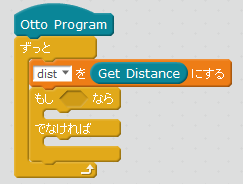
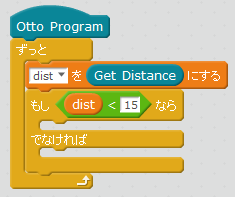
4. 距離の判定
"制御"ライブラリの"もし~なら~でなければ"ブロックを下図のように配置する
"演算"ライブラリから"<”ブロックを下図のようにコピー
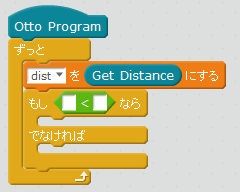
"データ・その他"ライブラリから2で作成した変数を"<"の左辺にコピーし、右辺に距離のしきい値(単位:cm)を指定する。
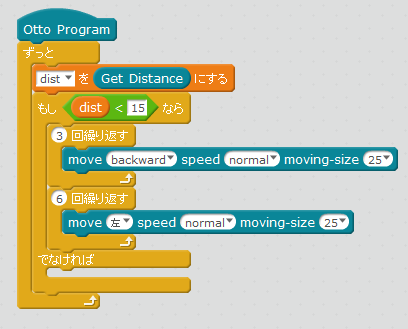
5. 障害物判定時の行動を指定
"制御"ライブラリから"~回繰り返す"ブロックをコピーし、その間に"ロボット"ライブラリの"move"ブロックを配置
(下図では、normalスピードで3回後に下がり、6回左旋回をする)
6. 障害物のないときの行動を指定
"でなければ"の部分に、"move"ブロック(fastスピードでの前進)を指定。
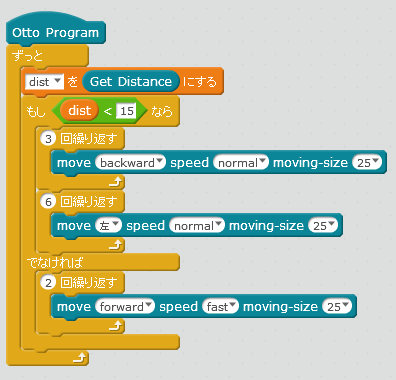
以上
Arduinoに書き込んで動作確認ください