概要
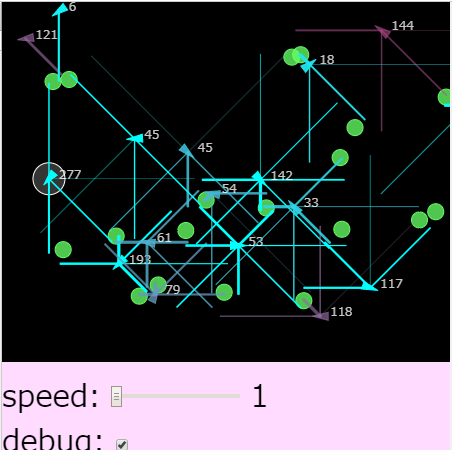
Toy-Neural-Network-JSでsteeringやってみた。
写真
サンプルコード
let sigmoid = new ActivationFunction(x => 1 / (1 + Math.exp(-x)), y => y * (1 - y));
let tanh = new ActivationFunction(x => Math.tanh(x), y => 1 - (y * y));
function mutate(x) {
if (random(1) < 0.1)
{
let offset = randomGaussian() * 0.5;
let newx = x + offset;
return newx;
}
else
{
return x;
}
}
class Sensor
{
constructor(angle) {
this.dir = p5.Vector.fromAngle(angle);
this.val = 0;
}
}
class Vehicle
{
constructor(brain) {
this.acceleration = createVector();
this.velocity = createVector();
this.position = createVector(random(width), random(height));
this.r = 4;
this.maxforce = 0.1;
this.maxspeed = 4;
this.minspeed = 0.25;
this.maxhealth = 3;
this.score = 0;
this.sensors = [];
for (let angle = 0; angle < TWO_PI; angle += sensorAngle)
{
this.sensors.push(new Sensor(angle));
}
if (brain)
{
this.brain = brain.copy();
this.brain.mutate(mutate);
}
else
{
let inputs = this.sensors.length + 6;
this.brain = new NeuralNetwork(inputs, 32, 2);
}
this.health = 1;
}
update() {
this.velocity.add(this.acceleration);
this.velocity.limit(this.maxspeed);
if (this.velocity.mag() < this.minspeed)
{
this.velocity.setMag(this.minspeed);
}
this.position.add(this.velocity);
this.acceleration.mult(0);
this.health = constrain(this.health, 0, this.maxhealth);
this.health -= 0.005;
this.score += 1;
}
dead() {
return (this.health < 0 || this.position.x > width + this.r || this.position.x < -this.r || this.position.y > height + this.r || this.position.y < -this.r);
}
clone(prob) {
let r = random(1);
if (r < prob)
{
return new Vehicle(this.brain);
}
}
think(food) {
for (let j = 0; j < this.sensors.length; j++)
{
this.sensors[j].val = sensorLength;
}
for (let i = 0; i < food.length; i++)
{
let otherPosition = food[i];
let dist = p5.Vector.dist(this.position, otherPosition);
if (dist > sensorLength)
{
continue;
}
let toFood = p5.Vector.sub(otherPosition, this.position);
for (let j = 0; j < this.sensors.length; j++)
{
let delta = this.sensors[j].dir.angleBetween(toFood);
if (delta < sensorAngle / 2)
{
this.sensors[j].val = min(this.sensors[j].val, dist);
}
}
}
let inputs = [];
inputs[0] = constrain(map(this.position.x, foodBuffer, 0, 0, 1), 0, 1);
inputs[1] = constrain(map(this.position.y, foodBuffer, 0, 0, 1), 0, 1);
inputs[2] = constrain(map(this.position.x, width - foodBuffer, width, 0, 1), 0, 1);
inputs[3] = constrain(map(this.position.y, height - foodBuffer, height, 0, 1), 0, 1);
inputs[4] = this.velocity.x / this.maxspeed;
inputs[5] = this.velocity.y / this.maxspeed;
for (let j = 0; j < this.sensors.length; j++)
{
inputs[j + 6] = map(this.sensors[j].val, 0, sensorLength, 1, 0);
}
let outputs = this.brain.predict(inputs);
let desired = createVector(2 * outputs[0] - 1, 2 * outputs[1] - 1);
desired.mult(this.maxspeed);
let steer = p5.Vector.sub(desired, this.velocity);
steer.limit(this.maxforce);
this.applyForce(steer);
}
eat(list) {
for (let i = list.length - 1; i >= 0; i--)
{
let d = p5.Vector.dist(list[i], this.position);
if (d < foodRadius)
{
list.splice(i, 1);
this.health++;
}
}
}
applyForce(force) {
this.acceleration.add(force);
}
display() {
let green = color(0, 255, 255, 255);
let red = color(255, 0, 100, 100);
let col = lerpColor(red, green, this.health)
push();
translate(this.position.x, this.position.y);
if (debug.checked())
{
for (let i = 0; i < this.sensors.length; i++)
{
let val = this.sensors[i].val;
if (val > 0)
{
stroke(col);
strokeWeight(map(val, 0, sensorLength, 4, 0));
let position = this.sensors[i].dir;
line(0, 0, position.x * val, position.y * val);
}
}
noStroke();
fill(255, 200);
text(int(this.score), 10, 0);
}
let theta = this.velocity.heading() + PI / 2;
rotate(theta);
fill(col);
strokeWeight(1);
stroke(col);
beginShape();
vertex(0, -this.r * 2);
vertex(-this.r, this.r * 2);
vertex(this.r, this.r * 2);
endShape(CLOSE);
pop();
}
highlight() {
fill(255, 255, 255, 50);
stroke(255);
ellipse(this.position.x, this.position.y, 32, 32);
}
}
let population = [];
let food = [];
let debug;
let speedSlider;
let speedSpan;
let foodRadius = 8;
let foodAmount = 25;
let foodBuffer = 50;
let totalSensors = 8;
let sensorLength = 150;
let sensorAngle = (Math.PI * 2) / totalSensors;
let best = null;
function setup() {
let canvas = createCanvas(640, 360);
canvas.parent('canvascontainer');
debug = select('#debug');
speedSlider = select('#speedSlider');
speedSpan = select('#speed');
for (let i = 0; i < 20; i++)
{
population[i] = new Vehicle();
}
}
function draw() {
background(0);
let cycles = speedSlider.value();
speedSpan.html(cycles);
for (let n = 0; n < cycles; n++)
{
while (food.length < foodAmount)
{
food.push(createVector(random(foodBuffer, width - foodBuffer), random(foodBuffer, height - foodBuffer)));
}
for (let v of population)
{
v.eat(food);
}
let record = -1;
for (let i = population.length - 1; i >= 0; i--)
{
let v = population[i];
v.think(food);
v.update(food);
if (v.dead())
{
population.splice(i, 1);
}
else
{
if (v.score > record)
{
record = v.score;
best = v;
}
}
}
if (population.length < 20)
{
for (let v of population)
{
let newVehicle = v.clone(0.1 * v.score / record);
if (newVehicle != null)
{
population.push(newVehicle);
}
}
}
}
for (let i = 0; i < food.length; i++)
{
fill(100, 255, 100, 200);
stroke(100, 255, 100);
ellipse(food[i].x, food[i].y, foodRadius * 2);
}
if (debug.checked())
{
best.highlight();
}
for (let v of population)
{
v.display();
}
}
成果物
以上。