# Homebrew(未インストール時)
/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh)"
# CMake のインストール
brew install cmake
# Git のインストール(未インストール時)
brew install git
# mujocoをcloneする
git clone https://github.com/google-deepmind/mujoco.git
cd mujoco
# ビルド
mkdir build && cd build
cmake -DCMAKE_POLICY_VERSION_MINIMUM=3.5 ..
# コンパイル
cmake --build . -- -j8
# モデルリポジトリをクローン(SO-101 定義を含む)
git clone https://github.com/TheRobotStudio/SO-ARM100.git
# MuJoCo の model フォルダへコピー
cp -r SO-ARM100/Simulation/SO101 ../model/so101_arm
# ビルド
cd ./build
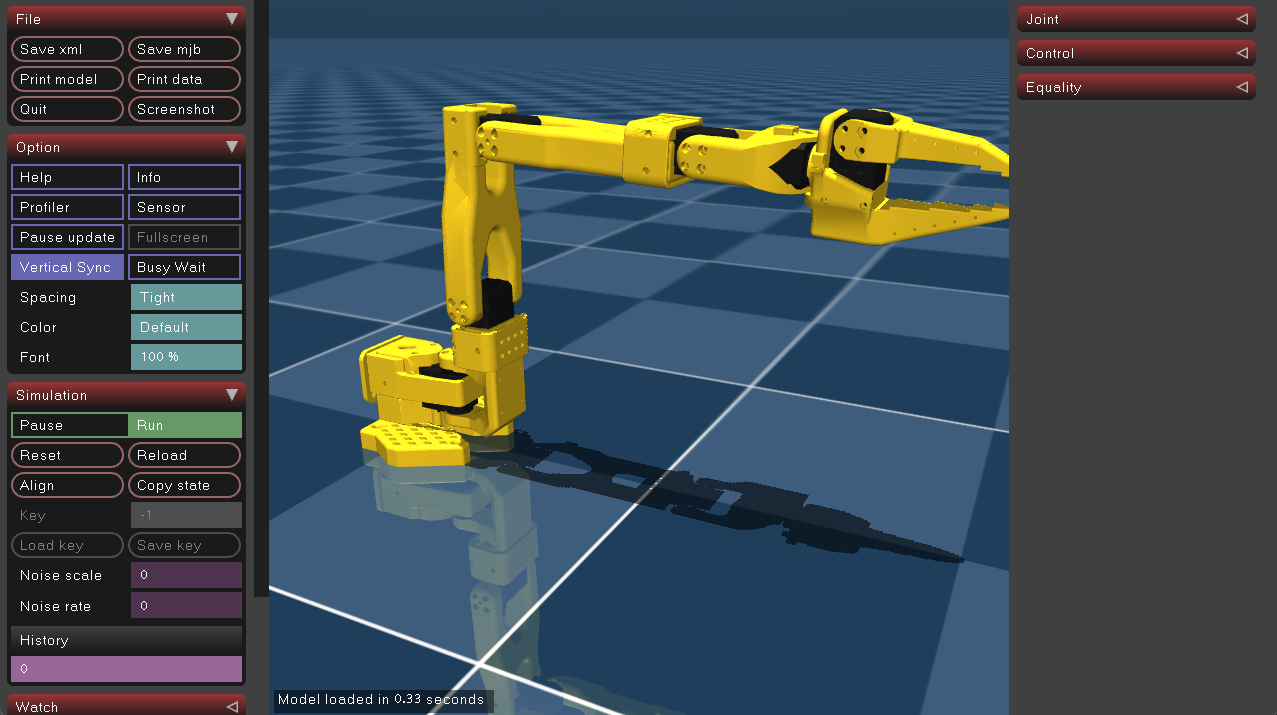
# シミュレーションの実行
./bin/simulate ../model/so101_arm/scene.xml