この記事は EtherCATについて語る Advent Calendar 2019 の5日目です。
昨日は@lipoyangさんの IoTつくるよ!でのEtherCATに関するFAQ でした。
さて、EtherCATスレーブに使える半導体 (2)ということで、今回は「マイコン内蔵EtherCATスレーブIC」についてまとめていきます。
前回の 「マイコン外付けEtherCATスレーブIC」と,
今回の「マイコン内蔵EtherCATスレーブIC」 との
違いと利点欠点については、また後日まとめます。
マイコン内蔵EtherCATスレーブIC
Renesas ルネサス

言わずと知れた国産半導体メーカー「ルネサス」が提供するEtherCATが組み込まれたマイコンという様なIC。
EherCATの機能を持つブロックと、CPUを持つブロックがあり、ワンチップで済むというのが利点なのだろう。
CPUもARM社のCortex-R4を使用するなど、何かに狙って出しているような気がする。

こちらは、CPUがRXv3コアが入ったマイコンである。
ブロック図をよく見ると、Ethernetx2 EtherCATx2 と書かれている。
要は、Ethernetのポートが二つあれば、高速にマイコンがパケットを転送してあげれば、EherCATの仕様を満たすことが出来る。というソフトウェアコーディングで実現出来ていると思われる。こういう逃げ道(EtherCATがポシャってもEthernetで生きていける!)はとても良いと思うが、ソフトウェアコーディングなので信頼性に不安が残る。また開発も難儀ナノではないだろうか。
TwitterでEtherCAT検索していたら見つけたボード。EtherCATと書いてあるので動くと思うが、ソース類は見当たらず。開発はもうHEWではなくe2 studioで行うようだ。少し気になる。人柱報告期待。
infineon
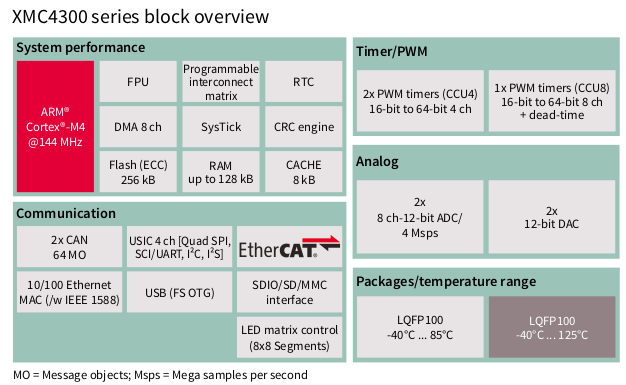
こちらも、CPU内蔵のEtherCATスレーブIC。CPUはARM Cortex-M4が乗っていて、見た目は開発にちょうどよい様に思える。海外の動画を見る限り人気っぽい。
問題は、PHYが外付けで配線が鬼のように大変な所だ。
悪くはないが、サポートするのは大変そう。
TexasInstruments

日本の代理店もやってる!やってる!と言うが、特に専用チップは無い。
強いて言えば、BeagleBoneでEtherCATが動くという話があり、勿論それはEthernetポートが2つあるためソフトウェアコーディングによる実装だが、それでも動くという話があり、更にTIはBeagleBoneで使われていたCPUからグラフィックやメモリを取っ払い、組込み用に組んだAMIC110というのがある。
どういう事かと言うと、化物である。
Linux(Ubuntu)がフルに動く様なCPUにEtherCATのスレーブ機能をもたせるのだから、それ以外の演算も計算も余裕で熟せる訳だが、オーバースペック過ぎて開発が進まないだろうし、融通が効かないだろう。ただこのICがあることでTIはEtherCATをやっている事になるのだから、それはある種の夢のようなICという事にしておこうと思う。
以上。今回は少し辛口でした。
マイコン内蔵って好きな使い慣れたマイコン選べないから嫌いなんだよねぇ〜
なので、自分は断然、マイコン外付けのスレーブICがオススメ。
更に、面倒くさいPHYの回路が内蔵のBeckhoff ET1100とMicrochip LAN9252がオススメ。
各社色んな方針や現場で戦っているので、どれが悪いとかはありませんのでね。皆さんの御判断におまかせします。
それでは、今日はここまで!
ありがとうございました!
北神(@nonnoise)
宣伝
ここで紹介した LAN9252 を使用した評価基板をスイッチサイエンスにて販売しております。
https://www.switch-science.com/catalog/5917/
よろしければご覧頂ければと思います。