前回の環境構築後に実際にUnityで強化学習を行っていく!
前回の記事はこちら、https://qiita.com/nol_miryuu/items/32cda0f5b7172197bb09
前提条件
Unityの基礎知識が多少必要です(オブジェクトの作り方・名前の付け方)
目的
青い球(AI Agent)が床から落ちずに黄色い箱(Target)に素早く近づくことができるようにAIを学習させる
構成
状態:Vector Observation(サイズ=8)
・ TargetのX,Y,Z座標の3つ
・ RollerAgentのX,Y,Z座標の3つ
・ RollerAgentのX,Z方向速度の2つ(Y方向には移動しないので除外)
行動:Continuous(サイズ=2)
・ 0:RollerAgentのX方向に加える力
・ 1:RollerAgentのZ方向に加える力
報酬:
・ RollerAgentがTargetに近づいた(RollerAgentとTargetとの距離が0に近づいた)場合,報酬(+1.0)を与え、エピソード完成
・ RollerAgentが床から落ちた(RollerAgentのY方向の位置が0未満になったら)場合、報酬を与えずにエピソード完了
決定:
・ 10ステップごと
強化学習サイクル(1ステップごとに実行されるプロセス)
状態取得 → 行動決定 → 行動実行と報酬取得 → ポリシー更新
学習環境の準備
1.青い球、名前=RollerAgentを配置する

2.黄色い箱 名前=Target を配置する

3.床 名前=Floor を配置する
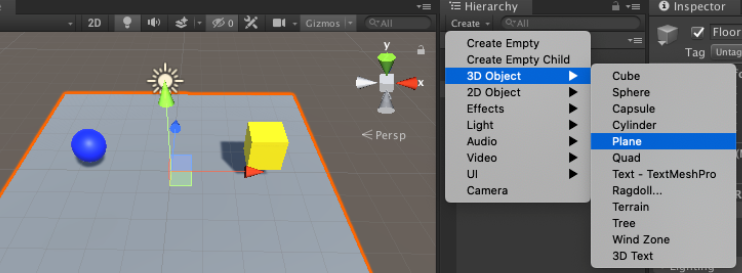
4.Main Camera : カメラの位置・角度を赤丸のように設定(全体がよく見える位置に調整するため)

5.各オブジェクトに色を付けるためにMaterialを作成(Asset>create)

6.メニューのWindowからPackage Managerを選択(ML-Agentをインポートする)

左上の「+」ぼたんを押してAdd package from diskを選択

前回作成したディレクトリに行き、ml-agents/com.unity.ml-agents/package.jsonを選択する

7.RollerAgent(青い球)にコンポーネント(機能)を追加する
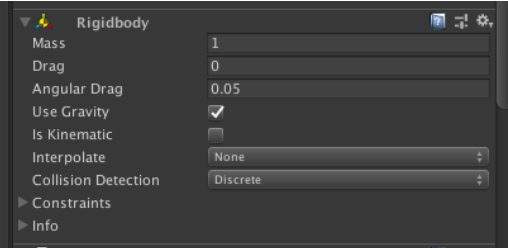
・ Rigidbody : 物理シミュレーションの仕組み
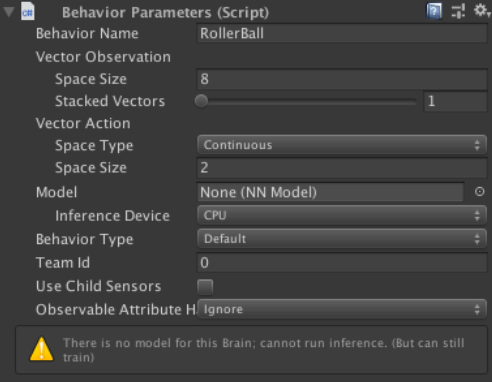
・ Behavior Parameters : RollerAgentの状態と行動のデータを設定
・ Decision Requester : 何ステップごとに「決定」を要求するかを設定
基本的にステップは0.02秒ごとに実行される。Decision Periodが「5」の場合は5 x 0.02 = 0.1秒ごと、 「10」の場合は10 x 0.02 = 0.2秒ごとに「決定」が実行されるRollerAgentに対しては最終的に下図のように設定する
Rigidbody
Behavior Paramenters
・Behavior Name:RollerBall(この名前でモデルが生成される)
・Vector ObservationのSpace Size:8(観察する状態の種類)
・Space Type:Continuous(行動の種別)
・Vector ActionのSpace Size:2(行動の種類)
Decision Requester

8.RollerAgents.csスクリプトを作成
・void Initialize()・・・エージェントのゲームオブジェクト生成時に1回だけ呼ばれる
・OnEpisodeBegin()・・・エピソード開始時に呼ばれる
・CollectObservations(VectorSensor sensor)・・・エージェントに渡す状態データを設定する
・OnActionReceived(float[] vactorAction)・・・決定された行動を実行し、報酬取得とエピソード完了を行う
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents;
using Unity.MLAgents.Sensors;
public class RollerAgent : Agent
{
public Transform target;
Rigidbody rBody;
public override void Initialize()
{
this.rBody = GetComponent<Rigidbody>();
}
// エピソード開始時に呼ばれる
public override void OnEpisodeBegin()
{
if (this.transform.position.y < 0) // RollerAgent(球)が床から落下している時に以下をリセット
{
this.rBody.angularVelocity = Vector3.zero; // 回転加速度をリセット
this.rBody.velocity = Vector3.zero; // 速度をリセット
this.transform.position = new Vector3(0.0f, 0.5f, 0.0f); // 位置をリセット
}
// Target(キューブ)の位置をリセット
target.position = new Vector3(Random.value * 8 - 4, 0.5f, Random.value * 8 - 4);
}
// エージェントに渡す観察データ(8項目)を設定する
public override void CollectObservations(VectorSensor sensor)
{
sensor.AddObservation(target.position); // Target(キューブ)のXYZ座標
sensor.AddObservation(this.transform.position); // RollerAgentのXYZ座標
sensor.AddObservation(rBody.velocity.x); // RollerAgentのX軸方向の速度
sensor.AddObservation(rBody.velocity.z); // RollerAgentのZ軸方向の速度
}
// 行動実行時に呼ばれる
public override void OnActionReceived(float[] vectorAction)
{
// RollerAgentに力を加える
Vector3 controlSignal = Vector3.zero;
controlSignal.x = vectorAction[0]; // ポリシーによって決定された行動データをセットする
// vectorAction[0]は X方向 に加える力(-1.0 〜 +1.0)
controlSignal.z = vectorAction[1]; // ポリシーによって決定された行動データをセットする
// vectorAction[1]は Y方向 に加える力(-1.0 〜 +1.0)
rBody.AddForce(controlSignal * 10);
// RollerAgentとTargetとの距離を測定
float distanceToTarget = Vector3.Distance(this.transform.position, target.position);
// RollerAgentがTargetの位置に到着したとき
if(distanceToTarget < 1.42f)
{
AddReward(1.0f); // 報酬を与える
EndEpisode(); // エピソードを完了する
}
// RollerAgentが床から落下したとき
if(this.transform.position.y < 0)
{
EndEpisode(); // 報酬を与えずにエピソードを完了する
}
}
}
9.RollerAgentのプロパティを設定
Max Step:エピソードの最大ステップ数、エピソードのステップ数が設定値を超えるとエピソード完了となる
Max Stepを1000、Target欄に黄色の箱「Target」を選択
10.ハイパラメータ設定ファイルの作成
・ml-agents/config/にsampleディレクトリ作成
・その中にRollerBall.yamlファイルを作成、ファイル内容は以下のとおり
`ハイパーパラメータ(訓練設定ファイル 拡張子.yaml[ヤムルと読む] )
- 学習に利用するパラメータ
- 人間が調整する必要がある
- 強化学習アルゴリズム(PPO/SAC)ごとに設定項目が異なる
`
behaviors:
RollerBall:
trainer_type: ppo
summary_freq: 1000
hyperparameters:
batch_size: 10
buffer_size: 100
learning_rate: 0.0003
learning_rate_schedule: linear
beta: 0.005
epsilon: 0.2
lambd: 0.95
num_epoch: 3
network_settings:
normalize: true
hidden_units: 128
num_layers: 2
vis_encode_type: simple
reward_signals:
extrinsic:
gamma: 0.99
strength: 1.0
keep_checkpoints: 5
RollerAgentの学習開始
前回のQittaで作成した仮想環境を動かす
poetry shell
ml-agentsディレクトリで以下のコマンドを実行する
mlagents-learn config/sample/RollerBall.yaml --run-id=model01
最後のmodel01は新たに訓練するたびに別名をつける
Start training by pressing the Play button in the in the Unity Editor.
上のコードがterminalに表記されたらUnityに戻って再生ボタンを押すと実行されます
1.Unityの再生ボタンを押すと訓練が始まる。
Stepが50000ごとにターミナルに情報が表示される。
Mean Reward:平均報酬ポイント・・・値が高くなれば精度が上がる. 1.0になったら訓練終了してしましょう。