はじめに
この記事は一人VR技術者認定試験 Advent Calendar 2018の20日目の記事です。
バーチャルリアリティ学の4章「バーチャル世界の構成手法」の内容をまとめていきます。
書籍の方も是非ご購入いただいた上でご利用ください。
4 バーチャル世界の構成手法
4.3 シミュレーション
4.3.1 シミュレーションのためのモデル
- モデルが巨大化すると計算負荷も増大する
- 剛体
- 位置・向き
- 速度、角速度
- 形状
- 柔軟物
- 剛体に加え、変形情報が必要
- 計算負荷が大きい
- 水や空気はもっと大きい
4.3.2 空間のシミュレーション
(1) 座標・移動モデル
- ユークリッド座標と姿勢(ロール、ピッチ、ヨー)で表現される
- フライトスルー
- 鳥瞰的視点が重要な場合
- ウォークスルー
- 都市景観シミュレーション
- 障害物との衝突などはユースケースに依る
- 衝突判定にはbounding volumeなどが用いられる(4.3.3参照)
(2) 広い範囲の移動、時間遅れ、ハンドリング
- 広大な空間を描画するのは無理なので空間を区切る
- グリッドベースが簡単
- Level Of Detail (LOD)
- 遠くからでも見える場合に有用
- 遠くのものは精密さを落とす
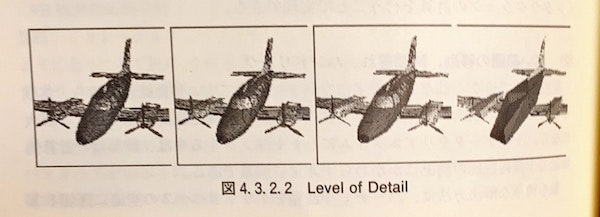
引用元: バーチャルリアリティ学
- scene graph
- オブジェクトをツリー構造で表現
- 効率的な管理やレンダリングの取捨選択に用いられる
- LODも1つのnode
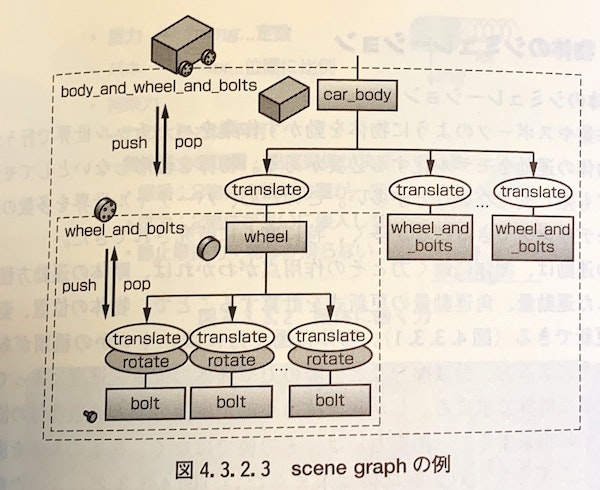
引用元: バーチャルリアリティ学
- バーチャル世界の構築
- CADや3DCGソフトが用いられる
- カメラやセンサーから再現する手法も
まとめ
一人VR技術者認定試験 Advent Calendar 2018の21日目は【VR学まとめ】4.3.3 物体のシミュレーションです。