はじめに
Raspberry Pi で ROS2 + I2C + GPIO が使える環境で、最低限のロボットプログラムをPythonで作ります。
Raspberry Pi 4 を使う場合は、前回の記事を参照。
サーボやセンサ周りの接続などは、他記事に任せます。
「ハード使わなくていいから、とりあえずソフトだけ動かしたい」という人は、ハードの部分を適当なプログラムで置き換えてください。
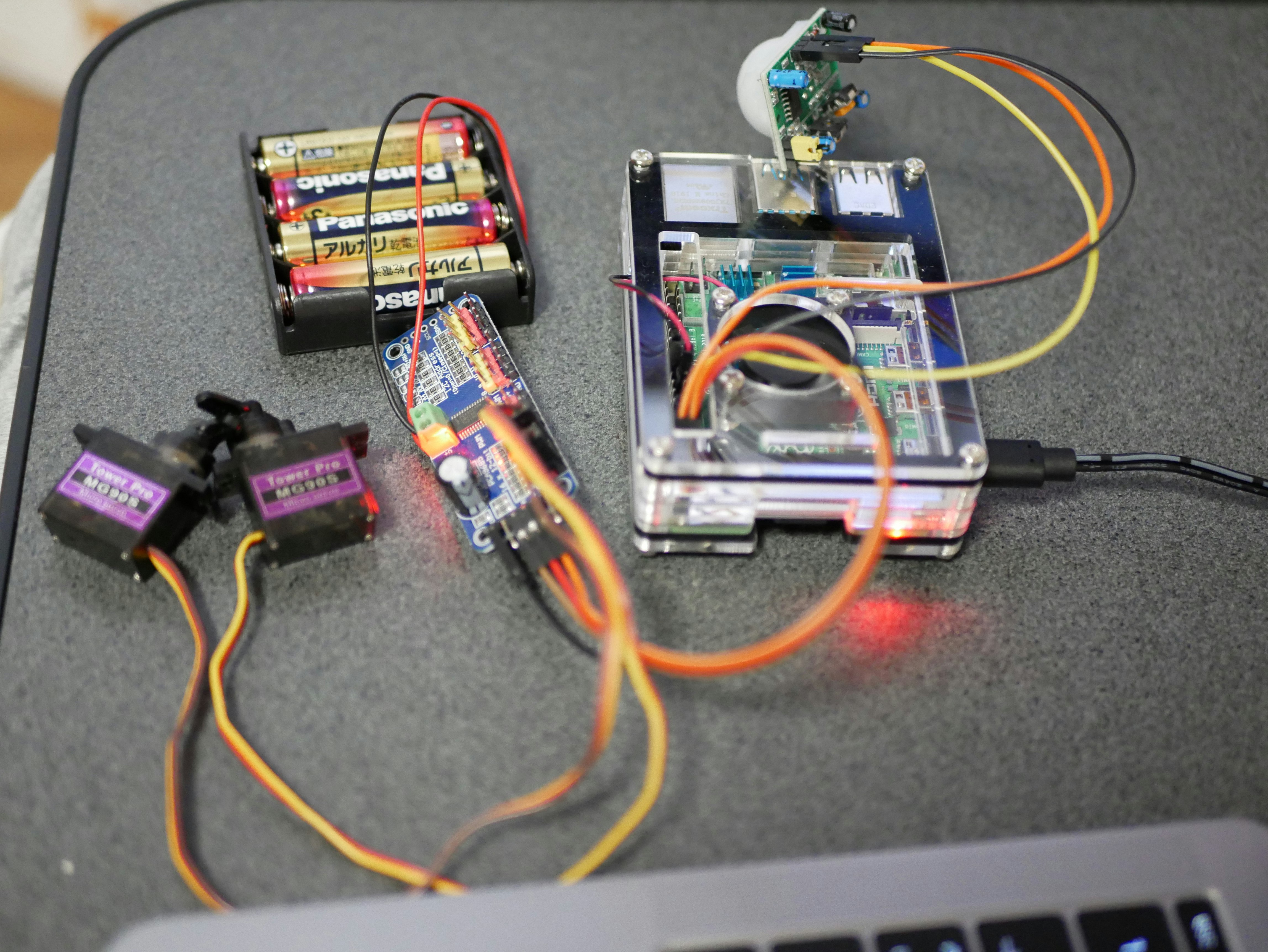
使用機材
- Raspberry Pi 4
- SDカード & SDカード書き込み用PC
- 人感センサ... HC-SR501
- サーボモータ*2つ... MG90S
- サーボドライバ... PCA9685
- 電池ボックス & 単3電池*4本
- ジャンパ線(メス-メス)*N本
(イメージ)
作成するプログラム
大体のロボットは
「センサなどのinputをもとに → 行動を決定して → 動いたり喋ったりのoutputを行う」
という制御がなされていると思います。
今回はこの各ステップをノード化して、3つのプログラムを作成します。
- input: センサ値を読み取って、publishしつづける(だけ)
- controller: ↑をsubscribeし、サーボ動作を決定してpublishする
- output: ↑をsubscribeし、サーボを動かす(だけ)
ROS2 で 自作Pythonパッケージ作成
今回は、Pythonでサクッと作りましょう。
パッケージ名は rpi_robot_py として、以下進めていきます。
$ mkdir -p ~/ros2_ws/src
$ cd ~/ros2_ws/src/
$ ros2 pkg create --build-type ament_python rpi_robot_py
$ cd rpi_robot_py
--build-type ament_python をつけると、Python用パッケージの雛形が作成されます(便利!)。
こんな感じのディレクトリ構造になっているはずです。
├── package.xml
├── resource
│ └── rpi_robot_py
├── rpi_robot_py
│ ├── __init__.py
├── setup.cfg
├── setup.py
└── test
├── test_copyright.py
├── test_flake8.py
└── test_pep257.py
rpi_robot_py/ の中に、自作Pythonプログラムを作っていきます。
(このディレクトリ名がパッケージ名と同じなのは、そういう慣習なのか...?)
input(センサ)ノードの作成
0.5秒間隔で人感センサ(HC-SR501)の値をpublishしつづけるだけのノードを作ります。
ノードの再利用性を高めるため、複雑な処理等はこのノードでは行いません。
ただセンサ値を流しつづけることに専念します。
import rclpy
from rclpy.node import Node
from std_msgs.msg import Bool
import pigpio
import time
SENSOR_GPIO_PIN = 17 # 17番PINにセンサ接続
TIMER_INTERVAL = 0.5
class HumanSensor(Node):
def __init__(self):
super().__init__('human_sensor_node')
self.init_sensor() # センサを使わない場合、不要
self.pub_sensor = self.create_publisher(Bool, '/input/human_sensor', 10)
self.timer = self.create_timer(TIMER_INTERVAL, self.sensor_timer_callback)
self.prev_sensor_data = False
def sensor_timer_callback(self):
sensor_msg = Bool(data=self.get_sensor_data())
self.pub_sensor.publish(sensor_msg)
def init_sensor(self):
self.pi = pigpio.pi()
self.pi.set_mode(SENSOR_GPIO_PIN, pigpio.INPUT)
self.pi.set_pull_up_down(SENSOR_GPIO_PIN, pigpio.PUD_UP)
# センサを使わない場合、True/Falseを返す適当な関数に置きかえてください
def get_sensor_data(self):
if self.pi.read(SENSOR_GPIO_PIN) == 1:
return True
else:
return False
def main(args=None):
rclpy.init(args=args)
node = HumanSensor()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
output(サーボ)ノードの作成
PCA9685と2つのサーボを使って、サーボを動かすノードを作成します。
ここでも複雑な処理はせず、指示をsubscribeしてサーボを動かすことだけに専念します。
また、ROS1では target(実行単位)= node でしたが、ROS2では単一ターゲット内で複数ノードを動かせるとのこと。
せっかくなので、これも試してみようと思います。
サーボ用のノード(クラス)を作成し、それを2つインスタンス化して、2つのサーボに割り当てます。
(この使い方が正しいのかはわかりませんが...。)
import rclpy
from rclpy.node import Node
from rclpy.executors import SingleThreadedExecutor
# from rclpy.executors import MultiThreadedExecutor
from std_msgs.msg import Int8
import Adafruit_PCA9685
ANGLE_MIN = -70
ANGLE_MAX = 70
# PCA9685 の 0 と 3 に、2つのサーボを接続
SERVO_LEFT_ID = 0
SERVO_RIGHT_ID = 3
class Servo(Node):
def __init__(self, servo_name, servo_id):
super().__init__('servo_node_' + servo_name)
self.init_pca9685() # サーボを使わない場合、不要
self.servo_name = servo_name
self.servo_id = servo_id
self.sub_topic_name = '/output/servo/' + servo_name
self.sub_servo = self.create_subscription(Int8, self.sub_topic_name, self.servo_callback, 10)
def init_pca9685(self):
self.pwm = Adafruit_PCA9685.PCA9685(address=0x40)
self.pwm.set_pwm_freq(60)
def servo_callback(self, servo_msg):
self.get_logger().info('subscribe servo angle: {}'.format(servo_msg.data))
self.set_angle(servo_msg.data)
# サーボを使わない場合、適当な関数に置きかえてください
def set_angle(self, angle):
angle = max(ANGLE_MIN, angle)
angle = min(ANGLE_MAX, angle)
pulse = (600-150) / 180 * (angle + 90) + 150
self.pwm.set_pwm(self.servo_id, 0, int(pulse))
def main(args=None):
rclpy.init(args=args)
executor = SingleThreadedExecutor()
## mutli thread の場合はこっち
# executor = MultiThreadedExecutor(num_threads=2)
## ノード(クラス)を2つインスタンス化し、executor に登録
node_left = Servo(servo_name='left', servo_id=SERVO_LEFT_ID)
node_right = Servo(servo_name='right', servo_id=SERVO_RIGHT_ID)
executor.add_node(node_left)
executor.add_node(node_right)
try:
executor.spin()
except KeyboardInterrupt:
pass
executor.shutdown()
node_left.destroy_node()
node_right.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
Int8型のメッセージで角度を指定し、/output/servo/left か /output/servo/right でpublishすると、サーボが動くプログラムが完成しました。
Controllerノードの作成
センサ値を流し続けてくれるノードと、角度を受け取ってサーボを動かすノードが用意できました。
最後に、そのセンサ値を受け取ってサーボの動かし方を決定する、いわゆる知的処理をするノードを作成しましょう。
今回は人感センサの値が False->True に変化したときに左側のサーボを、True->False に変化したときに右側のサーボを適当に動かすノードを作成します(全く知的じゃない)。
import rclpy
from rclpy.node import Node
from std_msgs.msg import Bool
from std_msgs.msg import Int8
import random
ANGLE_MIN = -70
ANGLE_MAX = 70
class MyController(Node):
def __init__(self):
super().__init__('controller_node')
self.prev_sensor_data = False
self.pub_servo_left = self.create_publisher(Int8, '/output/servo/left', 10)
self.pub_servo_right = self.create_publisher(Int8, '/output/servo/right', 10)
self.sub_sensor = self.create_subscription(Bool, '/input/human_sensor', self.sensor_callback, 10)
def sensor_callback(self, sensor_msg):
if self.prev_sensor_data != sensor_msg.data:
self.prev_sensor_data = sensor_msg.data
if sensor_msg.data == True:
self.pub_servo_left.publish( Int8(data=random.randint(ANGLE_MIN, ANGLE_MAX)) )
else:
self.pub_servo_right.publish( Int8(data=random.randint(ANGLE_MIN, ANGLE_MAX)) )
def main(args=None):
rclpy.init(args=args)
node = MyController()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
実行の準備
パッケージ作成時に自動生成された setup.py に、今回作成した3つのプログラムの情報を追記。
加えて、launch/ に後で作成する *.launch.py ファイルを読み込めるようにします。
from glob import glob
from setuptools import setup
package_name = 'rpi_robot_py'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
## 後で作成する 'launch/*.launch.py'用に追記
('share/' + package_name, glob('launch/*.launch.py'))
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='ns',
maintainer_email='ns@hoge.com',
description='sample robot program',
license='',
tests_require=['pytest'],
## 追記
entry_points={
'console_scripts': [
'human_sensor = rpi_robot_py.input_human_sensor:main',
'servo = rpi_robot_py.output_servo:main',
'controller = rpi_robot_py.controller:main',
],
},
)
3つのプログラムを一つ一つ起動するのは面倒なので、まとめて起動するlaunchファイルを用意します。
細かいことは気にせず、とにかく3つのプログラムを実行するlaunchファイル。
$ cd ~/ros2_ws/src/rpi_robot_py
$ mkdir launch
$ cd launch
$ touch rpi_robot.launch.py
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rpi_robot_py',
node_executable='human_sensor',
),
Node(
package='rpi_robot_py',
node_executable='servo',
output='screen'
),
Node(
package='rpi_robot_py',
node_executable='controller',
)
])
build します。
$ cd ~/ros2_ws
$ colcon build
$ . install/setup.bash
最終的なディレクトリ構成はこのようになりました。
├── launch
│ └── rpi_robot.launch.py
├── package.xml
├── resource
│ └── rpi_robot_py
├── rpi_robot_py
│ ├── controller.py
│ ├── __init__.py
│ ├── input_human_sensor.py
│ └── output_servo.py
├── setup.cfg
├── setup.py
└── test
├── test_copyright.py
├── test_flake8.py
└── test_pep257.py
最後にpigpioを使うための準備をして、完了です。
$ sudo pigpiod
実行
launchファイルを使って、3つのプログラムを全部起動します。
$ ros2 launch rpi_robot_py rpi_robot.launch.py
[INFO] [launch]: All log files can be found below /home/ubuntu/.ros/log/2019-12-08-09-34-30-479378-ubuntu-31195
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [human_sensor-1]: process started with pid [31205]
[INFO] [servo-2]: process started with pid [31206]
[INFO] [controller-3]: process started with pid [31207]
無事に3つのプログラムが起動しました。
が、なぜか self.get_logger().info() の出力が表示されませんでした。
このスレッドによると、 "stdbuf -o L" を前につけるととりあえずは表示されるらしい。
$ stdbuf -o L ros2 launch rpi_robot_py rpi_robot.launch.py
[INFO] [launch]: All log files can be found below /home/ubuntu/.ros/log/2019-12-08-09-41-45-243668-ubuntu-31234
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [human_sensor-1]: process started with pid [31244]
[INFO] [servo-2]: process started with pid [31245]
[INFO] [controller-3]: process started with pid [31246]
[servo-2] [INFO] [servo_node_left]: subscribe servo angle: 17
[servo-2] [INFO] [servo_node_right]: subscribe servo angle: 48
...
おわりに
ROS2 を用いた最低限のロボットプログラムを作成しました。
最終的な成果物は、こちらにも置いておきます。
ROS2 における Best Practice 的なものがよくわかっていないので、今後も要勉強です。