「栽培ロボットを作ろう」
https://qiita.com/nanbuwks/items/3d807e30e71e893c94eb
のコントロールボードをバージョンアップ。
改良点
- 駆動系を 5V から 12V に変更。
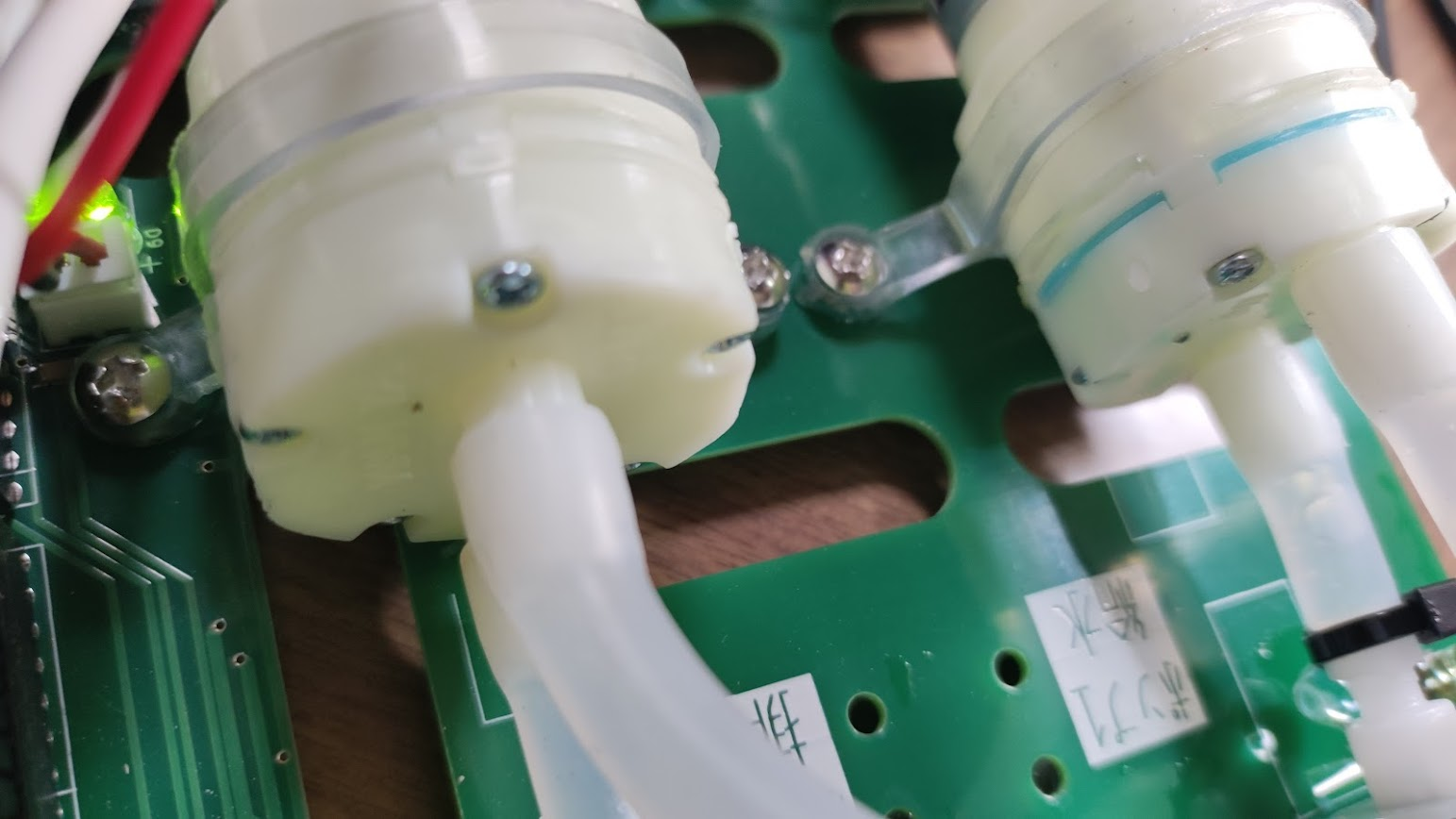
- 水抜き穴をつけて
- 基板を大型化
- 基本セットを 4ch コントロール版に変更
- 既存のものは 1ch が基本セットで 4ch に拡張可であった
- それに伴い水路を整理
- 水チューブをキットに標準添付
- リレー出力ができるように拡張
回路図

2023/11/23 追記
R7〜R10 は 10kΩ → 510kΩ に変更になります。
IO割当
| バルブ1 | GPIO27 |
| バルブ2 | GPIO14 |
| バルブ3 | GPIO13 |
| バルブ4 | GPIO21 |
| ポンプ1(給水ポンプ) | GPIO25 |
| ポンプ2(排水ポンプ) | GPIO26 |
| リレー1 | GPIO12 |
| リレー2 | GPIO13 |
| 水位センサ1 | GPIO34 |
| 水位センサ2 | GPIO35 |
| 水位センサ3 | GPIO32 |
| 水位センサ4 | GPIO15 |
| ブザー | GPIO2 |
| GROVE1 | GPIO22 |
| GROVE2 | GPIO39(VN) |
| サーミスタ・スイッチ | GPIO36(VP) |
キット内容
その1

ポンプx2
バルブx6
モータドライバx5
DCJACKx1
ブザーx1
SWx1
ESP32 DEVKITx1
その2

- センサx4
- チューブ太 50cmぐらい
- チューブ中 2mぐらい
- チューブ細 1mぐらい
- ポンプ電源ケーブル x 2
- 結束バンド x 6
- 分岐ジョイント x2
その3

- 8ピンソケット x10
- 15ピンソケット x2
- 2Pコネクタ x8
- センサコネクタ x4
- M3ナットx8
- M3トラスネジ長 x8
- M3トラスネジ短 x12
- LEDx10
- 0.1uFコンデンサ x14 (余分に入っています)
- 330〜680Ω 抵抗 x14 (余分に入っています)
- 10kΩ抵抗j x4 (余分に入っています)
組み立て方法
完成状態写真です。これをもとに組み立ててください。

DCJACKは左側のみとりつけます。
C2,C4,C15は電源が不安定な時に取り付けてください。

各出力それぞれに、LED,ダイオード、コンデンサ、抵抗がつきます。写真のように取り付けてください。LEDは写真右側がアノードで長い足側です。

ポンプは赤いマーキングのところに赤い線をはんだ付けします。写真は間違い(汗)
電源は12Vと5V2つ必要で、5VはUSBケーブルから供給します。

ポンプは給水ポンプと排水ポンプで上下が逆になります。
パイピング。右上に延びるのが水タンクへ。左側の4つが各プランターへ。
