「キヌア栽培のための制御回路をつくってみよう」
https://qiita.com/nanbuwks/items/138a8bbda59f0657b9df
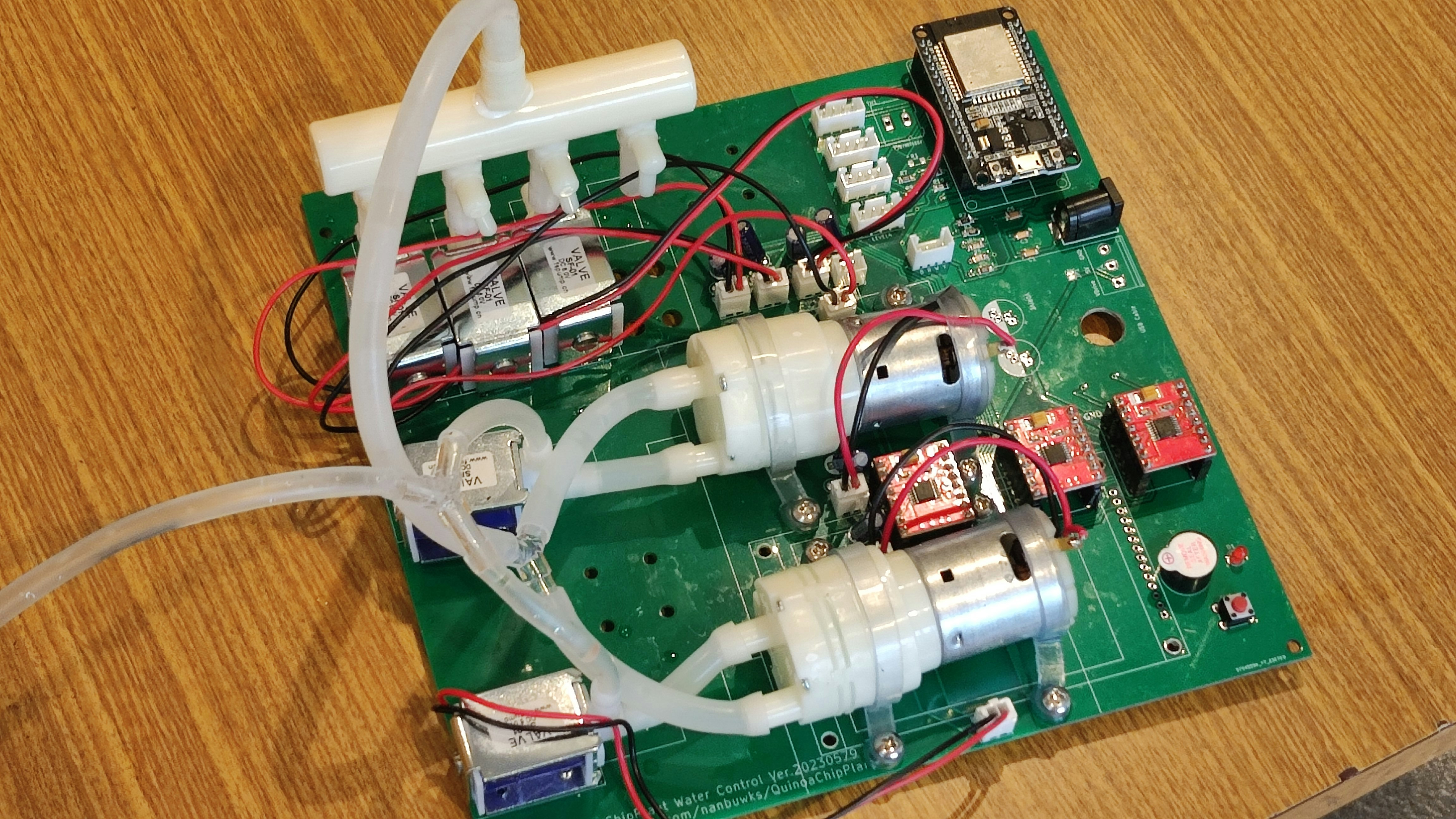
から改良して 4ch 給排水できるロボットを作成しました。
ロボットと言ってもこういったものではなくて
このようなものですが、センサーに基づく自律動作を行うことでロボットに位置づけています。
- 4ch 給排水
- 4ch 水位センサ
- 1ch の NeoPixel コントロールで 照明コントロール
- 1ch の 温度計
- ESP32 使用。WiFi 通信に発展できる
- 液晶画面の取り付けができる
組み立てよう!
PCB (プリント基板) に部品をはんだづけしていき組み立てていきます。
背の低い部品から組み立てます。
10KΩ抵抗を取り付けます。

コンデンサを取り付けます。

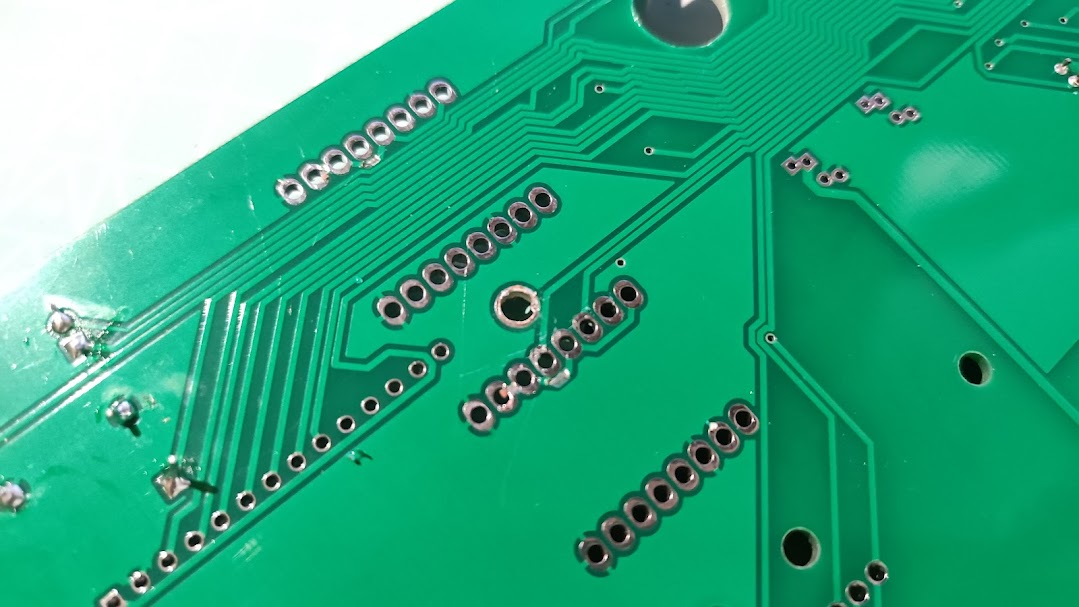
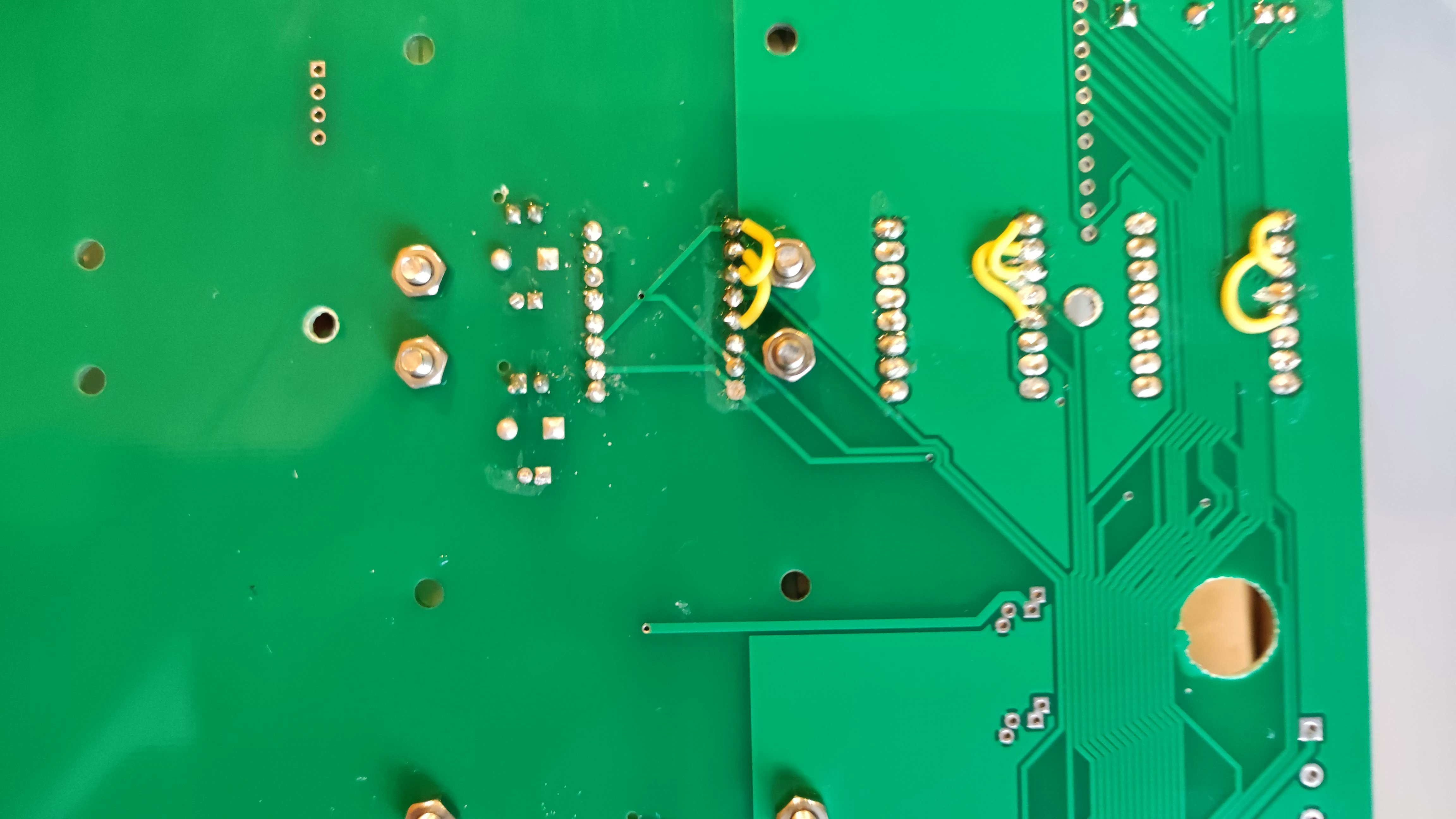
2023/05 バージョンはバグがあり、以下のようにパターンカットを行います。
スイッチ、LED、ブザーを取り付けます。LEDは脚の長いほうが写真手前側です。

コネクタを取り付けます。

電解コンデンサを取り付けます。C2,C4はオプションです。不安定な電源を用いる時に追加で取り付けてください。

13ピンソケットを取り付けます。温度計測のためのサーミスタはオプションです。

モータドライバ用の8ピンコネクタを取り付けます。

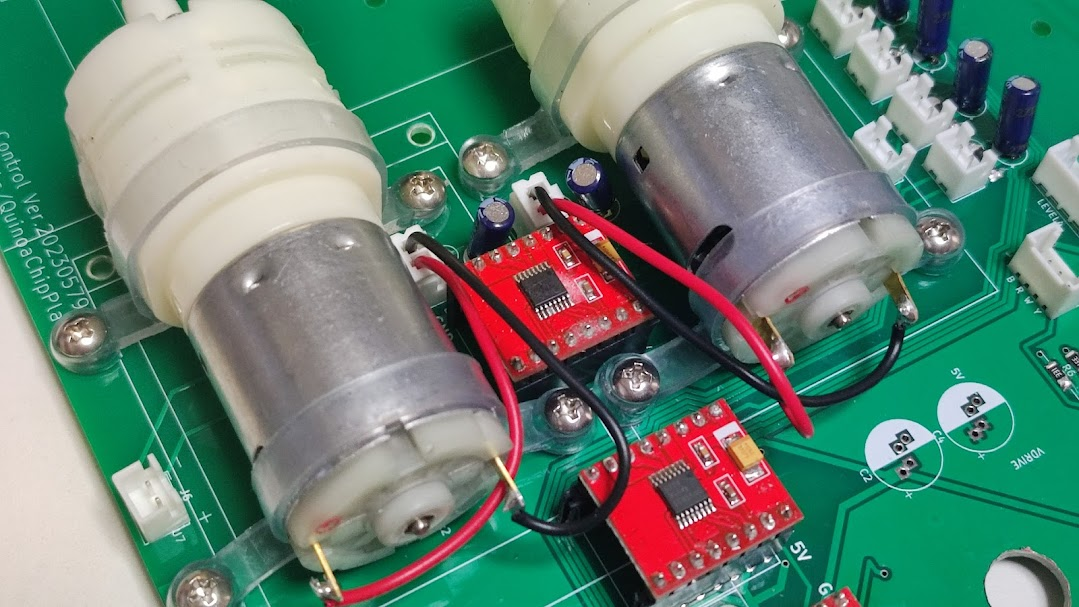
202305バージョンは、バグのためジャンパーを行います。
モータドライバに脚をつけます。

モーターに赤黒線をはんだづけします。

モータドライバ、モータを取り付けます。
ESP32を取り付け、このあとパイピングします。

ワークショップ
プログラムワークショップをやってみました。

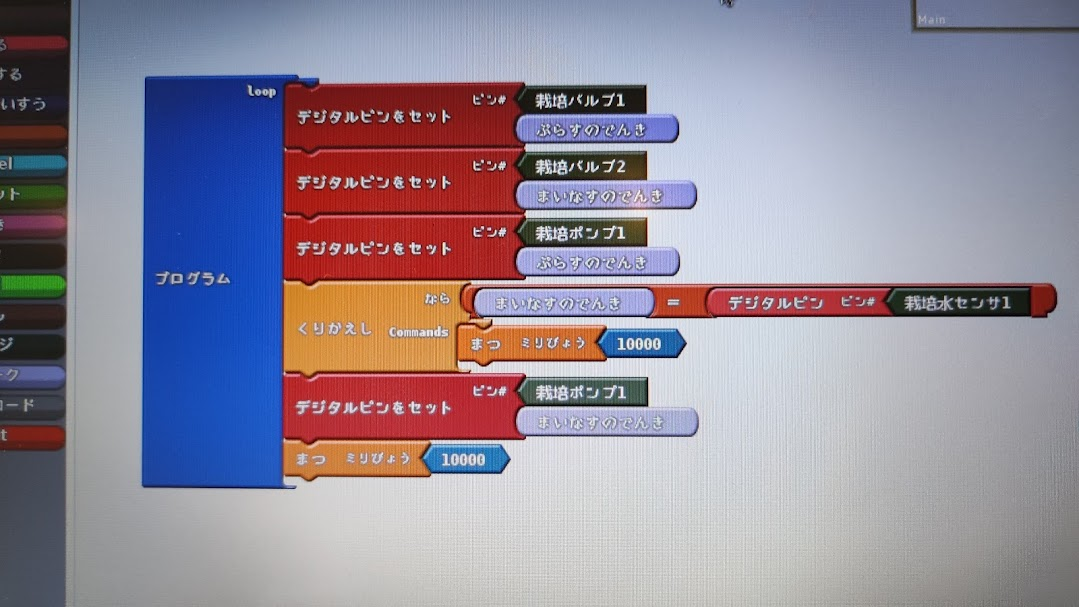
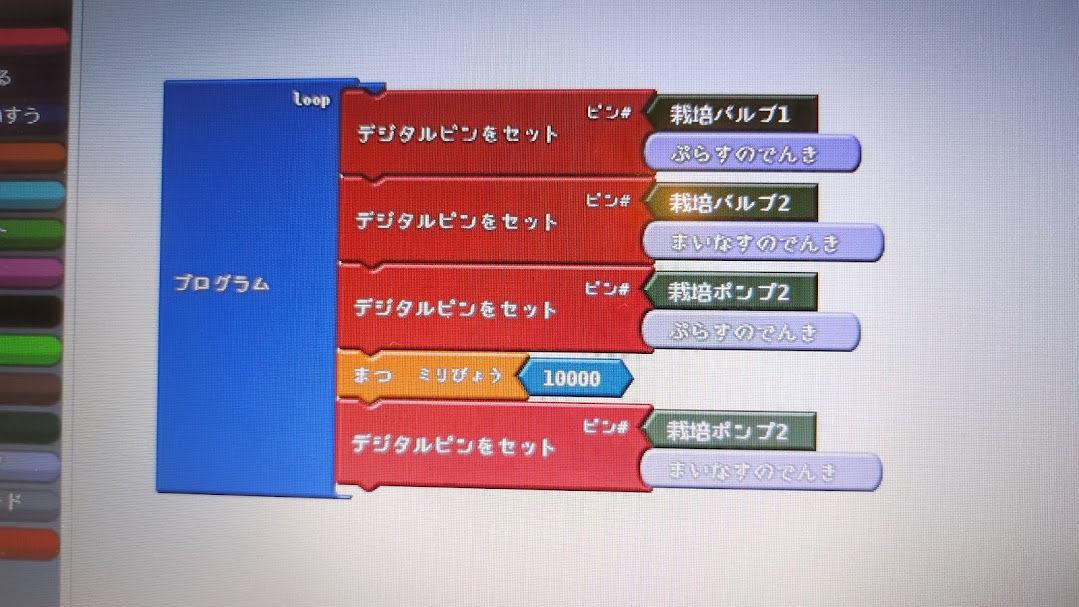
プログラム例です。
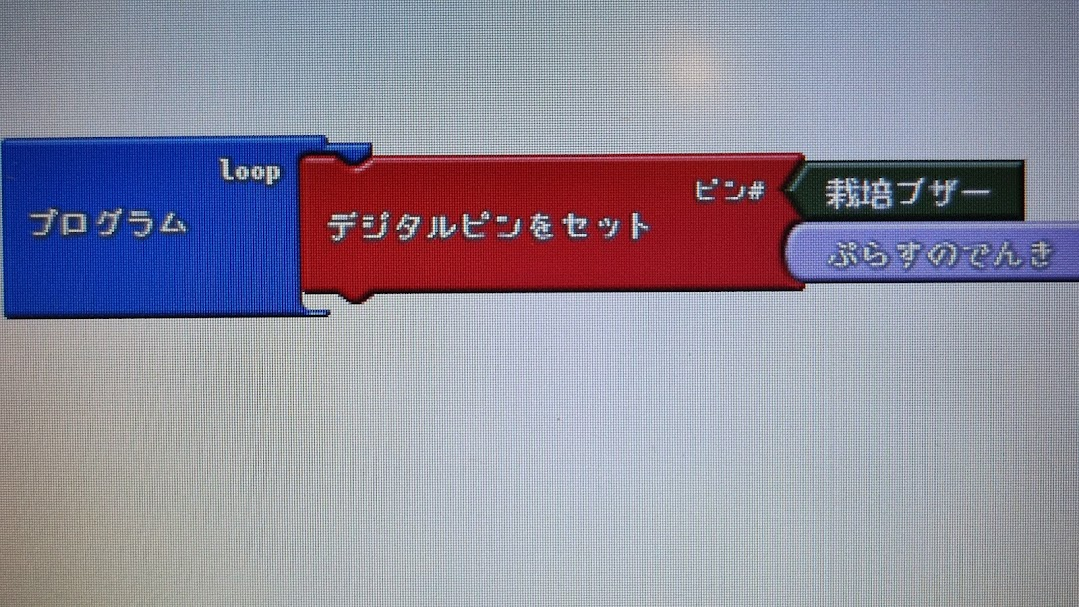
まず、ブザーを鳴らしてみましょう。
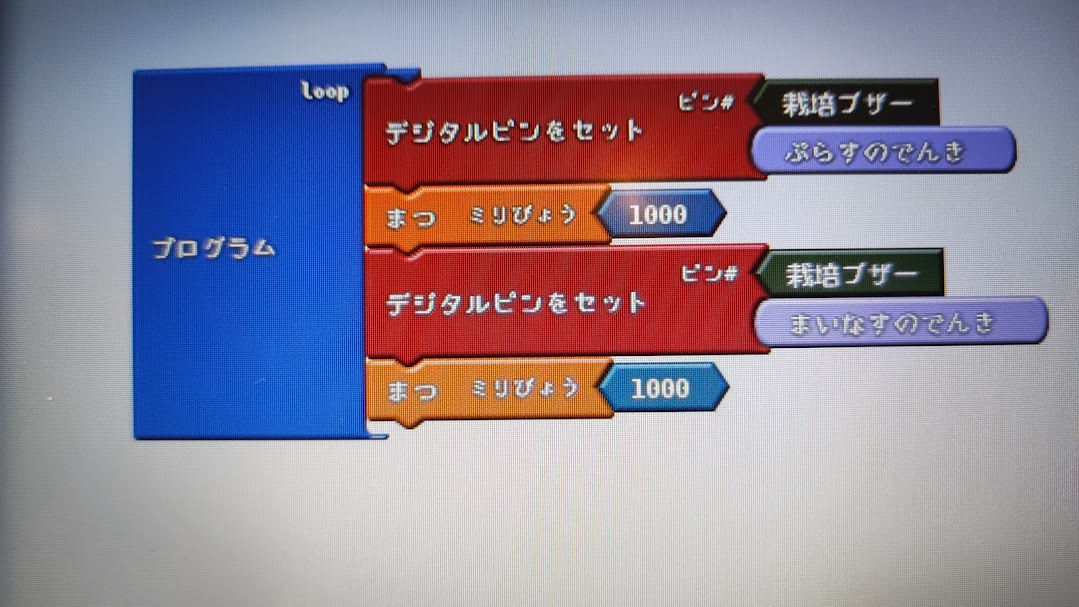
次に、ブザーを鳴らしたり止めたりするプログラムです。
ブザーをバルブとポンプに変えて、給排水してみましょう。
センサ連動の例です。