OpenCVでキャプチャしたTelloのカメラ映像を顔認識できるようにし、さらに認識した顔に対して一定の距離を保ち、画面中央に顔が来るように自動追尾する仕組みをPythonで実装してみました。
以下の記事の続きです。
トイドローン Tello をMacで操作&カメラ映像をOpenCVで受信してみる
前回の記事同様、予期しない動きをしたり制御不能になるリスクが伴いますので、周囲の環境に注意し、自己責任でお試しください。
動作確認環境
macOS 10.12.6
python 3.6.5
opencv 3.4.1
実行方法
キー入力検出のため、sudoで実行してください。
sudo python drone.py
以下のキーバインドを追加しています。
| キー(追加) | 動作 |
|---|---|
| 9 | 顔認識ON / 顔認識OFF |
| 0 | 自動追尾ON / 自動追尾OFF |
起動直後はどちらもOFFに設定されています。
顔認識がOFFのときは自動追尾をONにできません。
また顔認識ONかつ自動追尾ONのときに顔認識をOFFにすると、自動追尾もOFFになります。
主な仕組み
前回の記事の内容に加え、以下の機能を実装しています。
顔認識
OpenCVに予め用意されている分類器(Haar Cascade)を使って顔認識を実装しています。
face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
私の場合、以下のフォルダにインストールされていたものを実行プログラムと同じフォルダにコピーしました。
/usr/local/Cellar/opencv/3.4.1_5/share/OpenCV/haarcascades/haarcascade_frontalface_default.xml
顔認識の処理はやはり重いので、顔認識したあとはTracking APIを使って追尾するようにしました。Haar Cascadeによる顔認識時は2秒間隔で検出処理を行い、顔認識したあとは0.1秒間隔でトラッキング処理をさせています。
# 顔認識またはトラッキング処理を実行するフラグをたてるためのタイマー
self.tracking_interval = 2
def _timer_detect(self):
self.is_detect = True
if not self.stop_drone:
t = Timer(self.tracking_interval, self._timer_detect)
t.start()
# drone.is_detectがTrueのときに顔認識またはトラッキング処理を実行
if drone.is_detect:
# Haar Cascadeによる顔認識
if tracking == 0 or tracking == 2:
rc = tracker_init(frame)
if rc == 0:
if tracking == 0:
ret = tracker.init(frame, bbox)
else:
tracker_create(tracker_type)
ret = tracker.init(frame, bbox)
# 顔認識したら drone.tracking_intervalを0.1秒にしてトラッキングモードへ移行
tracking = 1
drone.tracking_interval = 0.1
# トラッキング処理
else:
ret, bbox = tracker.update(frame)
# Draw bounding box
if ret:
p1 = (int(bbox[0]), int(bbox[1]))
p2 = (int(bbox[0] + bbox[2]), int(bbox[1] + bbox[3]))
cv2.rectangle(frame, p1, p2, (255,0,0), 2, 1)
else :
print("Tracking failure detected")
# トラッキングエラーが発生したらdrone.tracking_intervalを2秒にして顔認識に戻る
tracking = 2
drone.tracking_interval = 2
# 顔認識またはトラッキング処理をしたらdrone.is_detectをFalseにする
# drone.time_intervalの間隔でTrueに変わり、再度、顔認識またはトラッキング処理が実行される
drone.is_detect = False
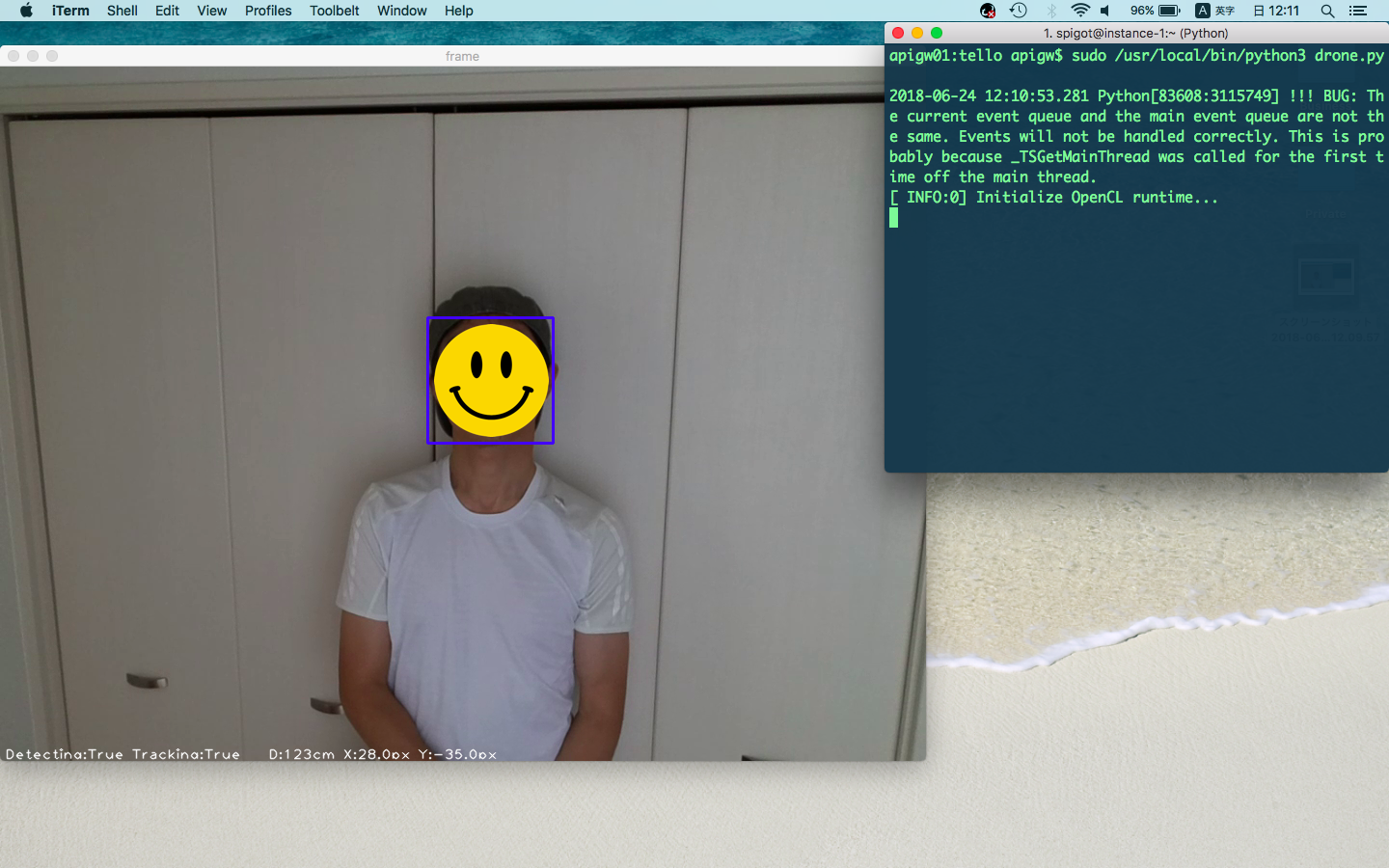
顔認識のON/OFFの状態は、カメラ映像左下のTracking:True/Falseで確認できます。また顔が検出できているときは、顔までの距離(cm)、画面中央から顔の中心までの距離(px)も表示されます。顔までの距離は、100cmのときの検出領域の平均的な面積(160px*160px ※私個人の場合)を基準として簡易に算出しています。
d = round(L0 * m.sqrt(S0 / (w * h)))
自動追尾
自動追尾というほど高度なものではないですが、顔までの距離を一定に保ち、顔を画面中央に位置するように自動でコントロールする仕組みを入れてみました。
顔認識ONのときに数字の0を押すと、自動追尾ON/OFFの切り替えができます。自動追尾中は、離着陸以外、キーによる操縦ができません(自動追尾が不安定になったら0を押せばその場にホバリングします)。自動追尾ON/OFFの状態も、カメラ映像左下のAutoPilot:True/Falseで確認できます。
一定に保つ距離は以下で設定しています(単位はcmです)。顔認識から算出した距離が下記設定値から±15cmを超えると前進後退して調整します。
# Base Distance
LB = 120
左右については中心から±80px、上下については中心から±50pxを超えると、左右上下移動して調整します(回転はしません)。
if (d - LB) > 15:
drone.pitch = drone.STICK_HOVER + drone.STICK_L
elif (d - LB) < -15:
drone.pitch = drone.STICK_HOVER - drone.STICK_L
else:
drone.pitch = drone.STICK_HOVER
if dx > 80:
drone.roll = drone.STICK_HOVER + drone.STICK_L
elif dx < -80:
drone.roll = drone.STICK_HOVER - drone.STICK_L
else:
drone.roll = drone.STICK_HOVER
if dy > 50:
drone.thr = drone.STICK_HOVER - drone.STICK_L
elif dy < -50:
drone.thr = drone.STICK_HOVER + drone.STICK_L
else:
drone.thr = drone.STICK_HOVER
追従速度を速くし過ぎると行ったり来たり不安定になり、遅くし過ぎると定位置に戻るのに時間がかかったりと、調整が難しいところです。Telloのジョイスティックコマンドは1024±660の範囲で制御されますが、いろいろ調整した結果、±60で追従させるようにしました。
以下、顔認識と追尾のイメージです。
ゆっくりな動きにしか追従できず、さすがに上位機種のようにはいきませんが、アイデアとプログラミング次第で手軽に実験できるところがTelloのおもしろいところです。
ソースコード
import tello
import numpy as np
import cv2
import sys
import time
import datetime
import math as m
LOCAL_IP = '192.168.10.2'
LOCAL_PORT_VIDEO = '8080'
# Center Cordinates
CX = 480
CY = 360
# Reference Distance
L0 = 100
S0 = 25600
# Base Distance
LB = 120
# Initialize Tracker
def tracker_init(frame):
global bbox
rc = 1
w_cur = 0
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
faces = face_cascade.detectMultiScale(gray, 1.3, 5)
for (x,y,w,h) in faces:
if w >= w_cur:
bbox = (x,y,w,h)
w_cur = w
bbox = (x,y,w,h)
if w_cur > 0:
rc = 0
return rc
# Create Tracker
def tracker_create(tracker_type):
global tracker
if tracker_type == 'BOOSTING':
tracker = cv2.TrackerBoosting_create()
if tracker_type == 'MIL':
tracker = cv2.TrackerMIL_create()
if tracker_type == 'KCF':
tracker = cv2.TrackerKCF_create()
if tracker_type == 'TLD':
tracker = cv2.TrackerTLD_create()
if tracker_type == 'MEDIANFLOW':
tracker = cv2.TrackerMedianFlow_create()
if tracker_type == 'GOTURN':
tracker = cv2.TrackerGOTURN_create()
if __name__ == '__main__':
drone = tello.Tello()
addr = 'udp://' + LOCAL_IP + ':' + str(LOCAL_PORT_VIDEO) + '?overrun_nonfatal=1&fifo_size=50000000'
cap = cv2.VideoCapture(addr)
# Set Cascade Classifier
face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
# Initialize Tracker
tracker_types = ['BOOSTING', 'MIL','KCF', 'TLD', 'MEDIANFLOW', 'GOTURN']
tracker_type = tracker_types[4]
tracker_create(tracker_type)
bbox = (480, 360, 160, 160)
tracking = 0
while(cap.isOpened()):
ret, frame = cap.read()
if ret == True:
# Key '9' enable/disable tracking
if drone.is_tracking:
if drone.is_detect:
if tracking == 0 or tracking == 2:
rc = tracker_init(frame)
if rc == 0:
if tracking == 0:
ret = tracker.init(frame, bbox)
else:
tracker_create(tracker_type)
ret = tracker.init(frame, bbox)
tracking = 1
drone.tracking_interval = 0.1
else:
ret, bbox = tracker.update(frame)
# Draw bounding box
if ret:
p1 = (int(bbox[0]), int(bbox[1]))
p2 = (int(bbox[0] + bbox[2]), int(bbox[1] + bbox[3]))
cv2.rectangle(frame, p1, p2, (255,0,0), 2, 1)
else :
print("Tracking failure detected")
tracking = 2
drone.tracking_interval = 2
drone.is_detect = False
try:
x = int(bbox[0])
y = int(bbox[1])
w = int(bbox[2])
h = int(bbox[3])
if w > 0:
d = round(L0 * m.sqrt(S0 / (w * h)))
dx = x + w/2 - CX
dy = y + h/2 - CY
else:
d = LB
cv2.putText(frame, ' D:' + str(d) + 'cm X:' + str(dx) + 'px Y:' + str(dy) + 'px', (360, 710), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (255, 255, 255), 1, cv2.LINE_AA)
cv2.rectangle(frame,(x,y),(x+w,y+h),(255,0,0),2)
if drone.is_autopilot:
if (d - LB) > 15:
drone.pitch = drone.STICK_HOVER + drone.STICK_L
elif (d - LB) < -15:
drone.pitch = drone.STICK_HOVER - drone.STICK_L
else:
drone.pitch = drone.STICK_HOVER
if dx > 80:
drone.roll = drone.STICK_HOVER + drone.STICK_L
elif dx < -80:
drone.roll = drone.STICK_HOVER - drone.STICK_L
else:
drone.roll = drone.STICK_HOVER
if dy > 50:
drone.thr = drone.STICK_HOVER - drone.STICK_L
elif dy < -50:
drone.thr = drone.STICK_HOVER + drone.STICK_L
else:
drone.thr = drone.STICK_HOVER
except Exception:
break
else:
tracking = 0
cv2.putText(frame, 'Tracking:' + str(drone.is_tracking) + ' AutoPilot:' + str(drone.is_autopilot), (5, 710), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (255, 255, 255), 1, cv2.LINE_AA)
cv2.imshow("frame", frame)
k = cv2.waitKey(1)
if drone.stop_drone:
print('stop: ' + str(drone.stop_drone))
time.sleep(1)
break
cap.release()
cv2.destroyAllWindows()
import socket
from struct import Struct
import sys
import termios
import fcntl
import os
from getch import getch
from pynput.keyboard import Key, Listener
from threading import Thread, Timer
import time
import datetime
class Tello:
TELLO_IP = '192.168.10.1'
TELLO_PORT_CMD = 8889
TELLO_PORT_VIDEO = 6038
LOCAL_IP = '192.168.10.2'
LOCAL_PORT_VIDEO = 8080
# Tello Commands
CMD_CONN_REQ = 'conn_req:'.encode() + TELLO_PORT_VIDEO.to_bytes(2,'little')
CMD_REQ_IFRAME =(0xcc, 0x58, 0x00, 0x7c, 0x60, 0x25, 0x00, 0x00, 0x00, 0x6c, 0x95)
CMD_TAKEOFF = (0xcc, 0x58, 0x00, 0x7c, 0x68, 0x54, 0x00, 0x01, 0x00, 0x6a, 0x90)
CMD_LAND = (0xcc, 0x60, 0x00, 0x27, 0x68, 0x55, 0x00, 0x02, 0x00, 0x00, 0xc6, 0x5b)
CMD_FLIGHT = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00)
STICK_HOVER = 1024
STICK_H = 660
STICK_M = 330
STICK_L = 60
# Format
S11 = Struct("!11B")
S12 = Struct("!12B")
S22 = Struct("!22B")
# CTC16 Table
TBL_CRC16 = [
0x0000, 0x1189, 0x2312, 0x329b, 0x4624, 0x57ad, 0x6536, 0x74bf, 0x8c48, 0x9dc1, 0xaf5a, 0xbed3, 0xca6c, 0xdbe5, 0xe97e, 0xf8f7,
0x1081, 0x0108, 0x3393, 0x221a, 0x56a5, 0x472c, 0x75b7, 0x643e, 0x9cc9, 0x8d40, 0xbfdb, 0xae52, 0xdaed, 0xcb64, 0xf9ff, 0xe876,
0x2102, 0x308b, 0x0210, 0x1399, 0x6726, 0x76af, 0x4434, 0x55bd, 0xad4a, 0xbcc3, 0x8e58, 0x9fd1, 0xeb6e, 0xfae7, 0xc87c, 0xd9f5,
0x3183, 0x200a, 0x1291, 0x0318, 0x77a7, 0x662e, 0x54b5, 0x453c, 0xbdcb, 0xac42, 0x9ed9, 0x8f50, 0xfbef, 0xea66, 0xd8fd, 0xc974,
0x4204, 0x538d, 0x6116, 0x709f, 0x0420, 0x15a9, 0x2732, 0x36bb, 0xce4c, 0xdfc5, 0xed5e, 0xfcd7, 0x8868, 0x99e1, 0xab7a, 0xbaf3,
0x5285, 0x430c, 0x7197, 0x601e, 0x14a1, 0x0528, 0x37b3, 0x263a, 0xdecd, 0xcf44, 0xfddf, 0xec56, 0x98e9, 0x8960, 0xbbfb, 0xaa72,
0x6306, 0x728f, 0x4014, 0x519d, 0x2522, 0x34ab, 0x0630, 0x17b9, 0xef4e, 0xfec7, 0xcc5c, 0xddd5, 0xa96a, 0xb8e3, 0x8a78, 0x9bf1,
0x7387, 0x620e, 0x5095, 0x411c, 0x35a3, 0x242a, 0x16b1, 0x0738, 0xffcf, 0xee46, 0xdcdd, 0xcd54, 0xb9eb, 0xa862, 0x9af9, 0x8b70,
0x8408, 0x9581, 0xa71a, 0xb693, 0xc22c, 0xd3a5, 0xe13e, 0xf0b7, 0x0840, 0x19c9, 0x2b52, 0x3adb, 0x4e64, 0x5fed, 0x6d76, 0x7cff,
0x9489, 0x8500, 0xb79b, 0xa612, 0xd2ad, 0xc324, 0xf1bf, 0xe036, 0x18c1, 0x0948, 0x3bd3, 0x2a5a, 0x5ee5, 0x4f6c, 0x7df7, 0x6c7e,
0xa50a, 0xb483, 0x8618, 0x9791, 0xe32e, 0xf2a7, 0xc03c, 0xd1b5, 0x2942, 0x38cb, 0x0a50, 0x1bd9, 0x6f66, 0x7eef, 0x4c74, 0x5dfd,
0xb58b, 0xa402, 0x9699, 0x8710, 0xf3af, 0xe226, 0xd0bd, 0xc134, 0x39c3, 0x284a, 0x1ad1, 0x0b58, 0x7fe7, 0x6e6e, 0x5cf5, 0x4d7c,
0xc60c, 0xd785, 0xe51e, 0xf497, 0x8028, 0x91a1, 0xa33a, 0xb2b3, 0x4a44, 0x5bcd, 0x6956, 0x78df, 0x0c60, 0x1de9, 0x2f72, 0x3efb,
0xd68d, 0xc704, 0xf59f, 0xe416, 0x90a9, 0x8120, 0xb3bb, 0xa232, 0x5ac5, 0x4b4c, 0x79d7, 0x685e, 0x1ce1, 0x0d68, 0x3ff3, 0x2e7a,
0xe70e, 0xf687, 0xc41c, 0xd595, 0xa12a, 0xb0a3, 0x8238, 0x93b1, 0x6b46, 0x7acf, 0x4854, 0x59dd, 0x2d62, 0x3ceb, 0x0e70, 0x1ff9,
0xf78f, 0xe606, 0xd49d, 0xc514, 0xb1ab, 0xa022, 0x92b9, 0x8330, 0x7bc7, 0x6a4e, 0x58d5, 0x495c, 0x3de3, 0x2c6a, 0x1ef1, 0x0f78
]
def __init__(self):
self.stop_drone = False
self.addr_cmd_tx = (self.TELLO_IP, self.TELLO_PORT_CMD)
self.sock_cmd = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
# Start Receiving Command
#self.thread_cmd_rx = Thread(target=self._cmd_rx)
#self.thread_cmd_rx.start()
# Send Connection Request
self._cmd_tx(self.CMD_CONN_REQ)
# Initial Terminal Settings
self.fd = sys.stdin.fileno()
self.attr_org = termios.tcgetattr(self.fd)
self.fcntl_org = fcntl.fcntl(self.fd, fcntl.F_GETFL)
# Cancel Echo
self._echo_off()
# Initialize Tracking Interval
self.tracking_interval = 2
# Start Key Listener
self.thread_key_listener = Thread(target=self._key_listener)
self.thread_key_listener.start()
# Initialize Flight Status
self.in_flight = False
# Initialize Flight Command
self.mode = 0
self.yaw = self.STICK_HOVER
self.thr = self.STICK_HOVER
self.pitch = self.STICK_HOVER
self.roll = self.STICK_HOVER
# Start Sending Flight Command
self.thread_flight_ctrl = Thread(target=self._flight_ctrl)
self.thread_flight_ctrl.start()
# Start Requesting I-Frame
self.thread_req_iframe = Thread(target=self._req_iframe)
self.thread_req_iframe.start()
# Start Forwarding Video
self.thread_fwd_video = Thread(target=self._fwd_video)
self.thread_fwd_video.start()
# Initialize Tracking Flag
self.is_tracking = False
self.is_detect = False
self.is_autopilot = False
# Start Tracking Timer
self.thread_timer_detect = Thread(target=self._timer_detect)
self.thread_timer_detect.start()
def _echo_off(self):
attr = termios.tcgetattr(self.fd)
attr[3] = attr[3] & ~termios.ECHO & ~termios.ICANON # & ~termios.ISIG
termios.tcsetattr(self.fd, termios.TCSADRAIN, attr)
fcntl.fcntl(self.fd, fcntl.F_SETFL, self.fcntl_org | os.O_NONBLOCK)
def _echo_on(self):
fcntl.fcntl(self.fd, fcntl.F_SETFL, self.fcntl_org)
termios.tcsetattr(self.fd, termios.TCSANOW, self.attr_org)
def _key_listener(self):
with Listener(
on_press = self._on_press,
on_release = self._on_release
) as listener:
listener.join()
def _on_press(self, key):
try:
keyPressed = '{0}'.format(key.char)
if not self.is_tracking and keyPressed == '9':
self.is_tracking = True
elif self.is_tracking and keyPressed == '9':
self.is_tracking = False
self.is_autopilot = False
elif self.is_tracking and not self.is_autopilot and keyPressed == '0':
self.is_autopilot = True
elif self.is_tracking and self.is_autopilot and keyPressed == '0':
self.is_autopilot = False
elif not self.is_autopilot:
if keyPressed == 'W':
self.thr = self.STICK_HOVER + self.STICK_H
elif keyPressed == 'w':
self.thr = self.STICK_HOVER + self.STICK_M
elif keyPressed == 'S':
self.thr = self.STICK_HOVER - self.STICK_H
elif keyPressed == 's':
self.thr = self.STICK_HOVER - self.STICK_M
elif keyPressed == 'A':
self.yaw = self.STICK_HOVER - self.STICK_H
elif keyPressed == 'a':
self.yaw = self.STICK_HOVER - self.STICK_M
elif keyPressed == 'D':
self.yaw = self.STICK_HOVER + self.STICK_H
elif keyPressed == 'd':
self.yaw = self.STICK_HOVER + self.STICK_M
elif keyPressed == 'I':
self.pitch = self.STICK_HOVER + self.STICK_H
elif keyPressed == 'i':
self.pitch = self.STICK_HOVER + self.STICK_M
elif keyPressed == 'K':
self.pitch = self.STICK_HOVER - self.STICK_H
elif keyPressed == 'k':
self.pitch = self.STICK_HOVER - self.STICK_M
elif keyPressed == 'J':
self.roll = self.STICK_HOVER - self.STICK_H
elif keyPressed == 'j':
self.roll = self.STICK_HOVER - self.STICK_M
elif keyPressed == 'L':
self.roll = self.STICK_HOVER + self.STICK_H
elif keyPressed == 'l':
self.roll = self.STICK_HOVER + self.STICK_M
else:
self.thr = self.STICK_HOVER
self.yaw = self.STICK_HOVER
self.pitch = self.STICK_HOVER
self.roll = self.STICK_HOVER
except AttributeError:
keyPressed = '{0}'.format(key)
if not self.in_flight and keyPressed == 'Key.space':
cmd = list(self.CMD_TAKEOFF)
self._cmd_tx(cmd)
self.in_flight = True
elif self.in_flight and keyPressed == 'Key.space':
cmd = list(self.CMD_LAND)
self._cmd_tx(cmd)
self.in_flight = False
elif not self.in_flight and keyPressed == 'Key.enter':
self.stop_drone = True
self._echo_on()
while True:
clearBuffer = getch()
if clearBuffer == '\n':
break
return False
elif not self.is_autopilot:
if keyPressed == 'Key.up':
self.pitch = self.STICK_HOVER + self.STICK_M
elif keyPressed == 'Key.down':
self.pitch = self.STICK_HOVER - self.STICK_M
elif keyPressed == 'Key.left':
self.roll = self.STICK_HOVER - self.STICK_M
elif keyPressed == 'Key.right':
self.roll = self.STICK_HOVER + self.STICK_M
else:
self.thr = self.STICK_HOVER
self.yaw = self.STICK_HOVER
self.pitch = self.STICK_HOVER
self.roll = self.STICK_HOVER
def _on_release(self, key):
if not self.is_autopilot:
self.thr = self.STICK_HOVER
self.yaw = self.STICK_HOVER
self.pitch = self.STICK_HOVER
self.roll = self.STICK_HOVER
else:
return
def _cmd_rx(self):
while True:
try:
data, server = self.sock_cmd.recvfrom(1518)
print('Rx: ' + str(data))
except Exception as e:
print(e)
break
def _cmd_tx(self, cmd):
if type(cmd) == bytes:
cmd = cmd
self.sock_cmd.sendto(cmd, self.addr_cmd_tx)
elif type(cmd) == list:
if len(cmd) == 11:
s = self.S11
elif len(cmd) == 12:
s = self.S12
elif len(cmd) == 22:
s = self.S22
else:
return
#print('Tx: unknown format')
if s:
cmd = s.pack(*cmd)
self.sock_cmd.sendto(cmd, self.addr_cmd_tx)
#print('Tx: ' + str(cmd))
def _flight_ctrl(self):
c = (self.mode<<44) + (self.yaw<<33) + (self.thr<<22) + (self.pitch<<11) + (self.roll)
cmd = list(self.CMD_FLIGHT)
for i in range(0,6):
cmd.append(c>>(8*i)&0xff)
now = datetime.datetime.now()
h = now.hour
m = now.minute
s = now.second
ms = round(now.microsecond / 1000)
cmd.append(h)
cmd.append(m)
cmd.append(s)
cmd.append(ms & 0xff)
cmd.append(ms >> 8)
buf = bytearray()
for b in cmd:
buf.append(b)
crc16 = self._calc_crc16(buf, len(buf))
cmd.append(crc16 & 0xff)
cmd.append(crc16 >> 8)
self._cmd_tx(cmd)
if not self.stop_drone:
t = Timer(0.02, self._flight_ctrl)
t.start()
def _req_iframe(self):
cmd = list(self.CMD_REQ_IFRAME)
self._cmd_tx(cmd)
if not self.stop_drone:
t = Timer(1, self._req_iframe)
t.start()
else:
self.sock_cmd.close()
def _fwd_video(self):
self.sock_video = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
self.addr_video = (self.LOCAL_IP, self.TELLO_PORT_VIDEO)
self.sock_video.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
self.sock_video.settimeout(.5)
self.sock_video.bind(self.addr_video)
self.sock_fwd = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
self.addr_fwd = (self.LOCAL_IP, self.LOCAL_PORT_VIDEO)
self.sock_fwd.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
self.sock_fwd.settimeout(.5)
data = bytearray(4096)
slice = bytearray()
isSps = False
while not self.stop_drone:
try:
size, addr = self.sock_video.recvfrom_into(data)
except socket.timeout:
time.sleep(.5)
continue
except socket.error as e:
print(e)
break
else:
if size > 6 and data[2] == 0x00 and data[3] == 0x00 and data[4] == 0x00 and data[5] == 0x01:
nal_type = data[6] & 0x1f
if nal_type == 7:
isSps = True
if isSps:
self.sock_fwd.sendto(data[2:size], self.addr_fwd)
self.sock_video.close()
self.sock_fwd.close()
def _timer_detect(self):
self.is_detect = True
if not self.stop_drone:
t = Timer(self.tracking_interval, self._timer_detect)
t.start()
def _calc_crc16(self, buf, size):
i = 0
seed = 0x3692
while size > 0:
seed = self.TBL_CRC16[(seed ^ buf[i]) & 0xff] ^ (seed >> 8)
i = i + 1
size = size - 1
return seed
実行方法
キー入力検知のためsudoで実行します。
sudo python drone.py
参考
以下のサイトを参考にさせていただきました。感謝。