Ryze Technologyのトイドローン Tello をMacで操作し、OpenCVでカメラ映像を受信するプログラムをPythonで作ってみました。
公開SDKにはないコマンドを使っていて、たまに通信が切れたりエラーになったり、制御不能による破損等のリスクがありますので、周囲の環境に注意し、自己責任でお試しください。
動作確認環境
macOS 10.12.6
python 3.6.5
opencv 3.4.1
実行方法
キー入力検出のため、sudoで実行してください。
sudo python drone.py
主な仕組み
最初に conn_req:6038 でTelloとの接続を行なった後、以下のスレッドが動作しています。
キー入力の検出
キー入力の検出にはpynputを使っています。各キーは、以下の動作にバインドしてあります。
| キー | 動作 |
|---|---|
| Space | 離陸 / 着陸 |
| Enter | 終了(着陸時) |
| w | 上昇(低速) |
| Shift + w | 上昇(高速) |
| s | 下降(低速) |
| Shift + s | 下降(高速) |
| a | 左回転(低速) |
| Shift + a | 左回転(高速) |
| d | 右回転(低速) |
| Shift + d | 右回転(高速) |
| i または ↑ | 前進(低速) |
| Shift + i | 前進(高速) |
| k または ↓ | 後退(高速) |
| Shift + k | 後退(高速) |
| j または← | 左(低速) |
| Shift + j | 左(高速) |
| l または → | 右(低速) |
| Shift + l | 右(高速) |
飛行制御データ送信
上記キー操作に対応するコマンドを20msごとに送信することで、キーを押し続けている間、連続して動作します(離着陸と終了を除く)。
ジョイスティックを操作しない(キーを何も押さない)状態では、ジョイスティックの制御値は1024になっていて、操作に応じて1024±660の範囲で制御されるそうです。最大・最小(±660)だと動きが早すぎるため、低速モード(±330)を入れました。
Iフレーム生成リクエスト送信
h.264の再生に必要なIフレームの生成およびSPS/PPS送信リクエストを1秒ごとに送信しています。
カメラ映像受信&転送
Telloからのカメラ映像は6038ポートに送られてきますが、不要なシーケンスバイトがあるため、そのままOpenCVでキャプチャするとノイズだらけでした。ちょっと強引ですが、不要なシーケンズバイトを取り除いて、再度ローカルホストの8080ポートにUDPで転送しています。
コマンドデータ受信
接続が成功すると、コマンドへの応答のほか、さまざまな情報がTelloから送られてきます。非常に多くのデータが飛んでくるので、コマンドデータ受信のスレッドは起動しないようコメントアウトしてあります。興味ある方は、コメントアウトを外して実行してみてください。
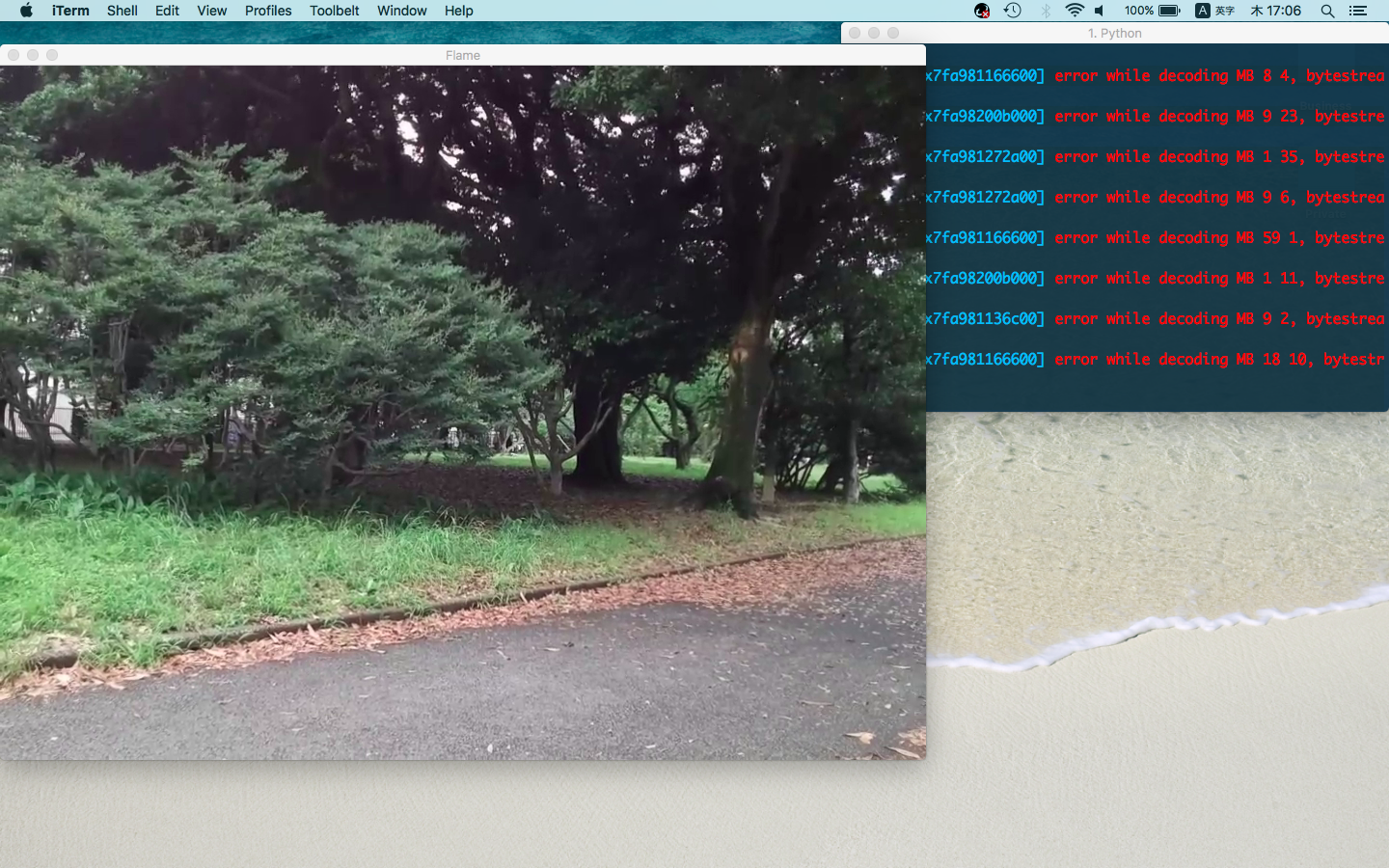
転送後のカメラ映像受信&表示
メインスレッドにて、8080ポートに転送したカメラ映像をOpenCVでキャプチャしています。受信直後は遅延やデコードエラーが出たりすることがありますが、じきに安定します。
ソースコード
import tello
import cv2
import time
LOCAL_IP = '192.168.10.2'
LOCAL_PORT_VIDEO = '8080'
if __name__ == '__main__':
drone = tello.Tello()
addr = 'udp://' + LOCAL_IP + ':' + str(LOCAL_PORT_VIDEO)
cap = cv2.VideoCapture(addr)
while(cap.isOpened()):
ret, frame = cap.read()
if ret == True:
cv2.imshow("Flame", frame)
k = cv2.waitKey(1)
if drone.stop_drone:
print(drone.stop_drone)
time.sleep(1)
break
cap.release()
cv2.destroyAllWindows()
import socket
from struct import Struct
import sys
import termios
import fcntl
import os
from getch import getch
from pynput.keyboard import Key, Listener
from threading import Thread, Timer
import time
import datetime
class Tello:
TELLO_IP = '192.168.10.1'
TELLO_PORT_CMD = 8889
TELLO_PORT_VIDEO = 6038
LOCAL_IP = '192.168.10.2'
LOCAL_PORT_VIDEO = 8080
# Tello Commands
CMD_CONN_REQ = 'conn_req:'.encode() + TELLO_PORT_VIDEO.to_bytes(2,'little')
CMD_REQ_IFRAME =(0xcc, 0x58, 0x00, 0x7c, 0x60, 0x25, 0x00, 0x00, 0x00, 0x6c, 0x95)
CMD_TAKEOFF = (0xcc, 0x58, 0x00, 0x7c, 0x68, 0x54, 0x00, 0x01, 0x00, 0x6a, 0x90)
CMD_LAND = (0xcc, 0x60, 0x00, 0x27, 0x68, 0x55, 0x00, 0x02, 0x00, 0x00, 0xc6, 0x5b)
CMD_HOVER = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0x04, 0x20, 0x00, 0x01, 0x08)
CMD_UP_H = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0x04, 0x20, 0xa5, 0x01, 0x08)
CMD_UP_L = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0x04, 0xa0, 0x52, 0x01, 0x08)
CMD_DOWN_H = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0x04, 0x20, 0x5b, 0x00, 0x08)
CMD_DOWN_L = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0x04, 0xa0, 0xad, 0x00, 0x08)
CMD_CCW_H = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0x04, 0x20, 0x00, 0xd9, 0x02)
CMD_CCW_L = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0x04, 0x20, 0x00, 0x6d, 0x05)
CMD_CW_H = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0x04, 0x20, 0x00, 0x29, 0x0d)
CMD_CW_L = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0x04, 0x20, 0x00, 0x95, 0x0a)
CMD_FWD_H = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0xa4, 0x34, 0x00, 0x01, 0x08)
CMD_FWD_L = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0x54, 0x2a, 0x00, 0x01, 0x08)
CMD_BACK_H = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0x64, 0x0b, 0x00, 0x01, 0x08)
CMD_BACK_L = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x00, 0xb4, 0x15, 0x00, 0x01, 0x08)
CMD_LEFT_H = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x6c, 0x01, 0x20, 0x00, 0x01, 0x08)
CMD_LEFT_L = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0xb6, 0x02, 0x20, 0x00, 0x01, 0x08)
CMD_RIGHT_H = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x94, 0x06, 0x20, 0x00, 0x01, 0x08)
CMD_RIGHT_L = (0xcc, 0xb0, 0x00, 0x7f, 0x60, 0x50, 0x00, 0x00, 0x00, 0x4a, 0x05, 0x20, 0x00, 0x01, 0x08)
# Format
S11 = Struct("!11B")
S12 = Struct("!12B")
S22 = Struct("!22B")
# CTC16 Table
TBL_CRC16 = [
0x0000, 0x1189, 0x2312, 0x329b, 0x4624, 0x57ad, 0x6536, 0x74bf, 0x8c48, 0x9dc1, 0xaf5a, 0xbed3, 0xca6c, 0xdbe5, 0xe97e, 0xf8f7,
0x1081, 0x0108, 0x3393, 0x221a, 0x56a5, 0x472c, 0x75b7, 0x643e, 0x9cc9, 0x8d40, 0xbfdb, 0xae52, 0xdaed, 0xcb64, 0xf9ff, 0xe876,
0x2102, 0x308b, 0x0210, 0x1399, 0x6726, 0x76af, 0x4434, 0x55bd, 0xad4a, 0xbcc3, 0x8e58, 0x9fd1, 0xeb6e, 0xfae7, 0xc87c, 0xd9f5,
0x3183, 0x200a, 0x1291, 0x0318, 0x77a7, 0x662e, 0x54b5, 0x453c, 0xbdcb, 0xac42, 0x9ed9, 0x8f50, 0xfbef, 0xea66, 0xd8fd, 0xc974,
0x4204, 0x538d, 0x6116, 0x709f, 0x0420, 0x15a9, 0x2732, 0x36bb, 0xce4c, 0xdfc5, 0xed5e, 0xfcd7, 0x8868, 0x99e1, 0xab7a, 0xbaf3,
0x5285, 0x430c, 0x7197, 0x601e, 0x14a1, 0x0528, 0x37b3, 0x263a, 0xdecd, 0xcf44, 0xfddf, 0xec56, 0x98e9, 0x8960, 0xbbfb, 0xaa72,
0x6306, 0x728f, 0x4014, 0x519d, 0x2522, 0x34ab, 0x0630, 0x17b9, 0xef4e, 0xfec7, 0xcc5c, 0xddd5, 0xa96a, 0xb8e3, 0x8a78, 0x9bf1,
0x7387, 0x620e, 0x5095, 0x411c, 0x35a3, 0x242a, 0x16b1, 0x0738, 0xffcf, 0xee46, 0xdcdd, 0xcd54, 0xb9eb, 0xa862, 0x9af9, 0x8b70,
0x8408, 0x9581, 0xa71a, 0xb693, 0xc22c, 0xd3a5, 0xe13e, 0xf0b7, 0x0840, 0x19c9, 0x2b52, 0x3adb, 0x4e64, 0x5fed, 0x6d76, 0x7cff,
0x9489, 0x8500, 0xb79b, 0xa612, 0xd2ad, 0xc324, 0xf1bf, 0xe036, 0x18c1, 0x0948, 0x3bd3, 0x2a5a, 0x5ee5, 0x4f6c, 0x7df7, 0x6c7e,
0xa50a, 0xb483, 0x8618, 0x9791, 0xe32e, 0xf2a7, 0xc03c, 0xd1b5, 0x2942, 0x38cb, 0x0a50, 0x1bd9, 0x6f66, 0x7eef, 0x4c74, 0x5dfd,
0xb58b, 0xa402, 0x9699, 0x8710, 0xf3af, 0xe226, 0xd0bd, 0xc134, 0x39c3, 0x284a, 0x1ad1, 0x0b58, 0x7fe7, 0x6e6e, 0x5cf5, 0x4d7c,
0xc60c, 0xd785, 0xe51e, 0xf497, 0x8028, 0x91a1, 0xa33a, 0xb2b3, 0x4a44, 0x5bcd, 0x6956, 0x78df, 0x0c60, 0x1de9, 0x2f72, 0x3efb,
0xd68d, 0xc704, 0xf59f, 0xe416, 0x90a9, 0x8120, 0xb3bb, 0xa232, 0x5ac5, 0x4b4c, 0x79d7, 0x685e, 0x1ce1, 0x0d68, 0x3ff3, 0x2e7a,
0xe70e, 0xf687, 0xc41c, 0xd595, 0xa12a, 0xb0a3, 0x8238, 0x93b1, 0x6b46, 0x7acf, 0x4854, 0x59dd, 0x2d62, 0x3ceb, 0x0e70, 0x1ff9,
0xf78f, 0xe606, 0xd49d, 0xc514, 0xb1ab, 0xa022, 0x92b9, 0x8330, 0x7bc7, 0x6a4e, 0x58d5, 0x495c, 0x3de3, 0x2c6a, 0x1ef1, 0x0f78
]
def __init__(self):
self.stop_drone = False
self.addr_cmd_tx = (self.TELLO_IP, self.TELLO_PORT_CMD)
self.sock_cmd = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
# Start Receiving Command
#self.thread_cmd_rx = Thread(target=self._cmd_rx)
#self.thread_cmd_rx.start()
# Send Connection Request
self._cmd_tx(self.CMD_CONN_REQ)
# Initial Terminal Settings
self.fd = sys.stdin.fileno()
self.attr_org = termios.tcgetattr(self.fd)
self.fcntl_org = fcntl.fcntl(self.fd, fcntl.F_GETFL)
# Cancel Echo
self._echo_off()
# Start Key Listener
self.thread_key_listener = Thread(target=self._key_listener)
self.thread_key_listener.start()
# Initialize Flight Status
self.in_flight = False
# Initialize Flight Command
self.flight_cmd = self.CMD_HOVER
# Start Sending Flight Command
self.thread_flight_ctrl = Thread(target=self._flight_ctrl)
self.thread_flight_ctrl.start()
# Start Requesting I-Frame
self.thread_req_iframe = Thread(target=self._req_iframe)
self.thread_req_iframe.start()
# Start Forwarding Video
self.thread_fwd_video = Thread(target=self._fwd_video)
self.thread_fwd_video.start()
def _echo_off(self):
attr = termios.tcgetattr(self.fd)
attr[3] = attr[3] & ~termios.ECHO & ~termios.ICANON # & ~termios.ISIG
termios.tcsetattr(self.fd, termios.TCSADRAIN, attr)
fcntl.fcntl(self.fd, fcntl.F_SETFL, self.fcntl_org | os.O_NONBLOCK)
def _echo_on(self):
fcntl.fcntl(self.fd, fcntl.F_SETFL, self.fcntl_org)
termios.tcsetattr(self.fd, termios.TCSANOW, self.attr_org)
def _key_listener(self):
with Listener(
on_press = self._on_press,
on_release = self._on_release
) as listener:
listener.join()
def _on_press(self, key):
try:
keyPressed = '{0}'.format(key.char)
if keyPressed == 'W':
self.flight_cmd = self.CMD_UP_H
elif keyPressed == 'w':
self.flight_cmd = self.CMD_UP_L
elif keyPressed == 'S':
self.flight_cmd = self.CMD_DOWN_H
elif keyPressed == 's':
self.flight_cmd = self.CMD_DOWN_L
elif keyPressed == 'A':
self.flight_cmd = self.CMD_CCW_H
elif keyPressed == 'a':
self.flight_cmd = self.CMD_CCW_L
elif keyPressed == 'D':
self.flight_cmd = self.CMD_CW_H
elif keyPressed == 'd':
self.flight_cmd = self.CMD_CW_L
elif keyPressed == 'I':
self.flight_cmd = self.CMD_FWD_H
elif keyPressed == 'i':
self.flight_cmd = self.CMD_FWD_L
elif keyPressed == 'K':
self.flight_cmd = self.CMD_BACK_H
elif keyPressed == 'k':
self.flight_cmd = self.CMD_BACK_L
elif keyPressed == 'J':
self.flight_cmd = self.CMD_LEFT_H
elif keyPressed == 'j':
self.flight_cmd = self.CMD_LEFT_L
elif keyPressed == 'L':
self.flight_cmd = self.CMD_RIGHT_H
elif keyPressed == 'l':
self.flight_cmd = self.CMD_RIGHT_L
else:
self.flight_cmd = self.CMD_HOVER
except AttributeError:
keyPressed = '{0}'.format(key)
self.flight_cmd = self.CMD_HOVER
if not self.in_flight and keyPressed == 'Key.space':
cmd = list(self.CMD_TAKEOFF)
self._cmd_tx(cmd)
self.in_flight = True
elif self.in_flight and keyPressed == 'Key.space':
cmd = list(self.CMD_LAND)
self._cmd_tx(cmd)
self.in_flight = False
elif not self.in_flight and keyPressed == 'Key.enter':
self.stop_drone = True
self._echo_on()
while True:
clearBuffer = getch()
if clearBuffer == '\n':
break
return False
elif keyPressed == 'Key.up':
self.flight_cmd = self.CMD_FWD_L
elif keyPressed == 'Key.down':
self.flight_cmd = self.CMD_BACK_L
elif keyPressed == 'Key.left':
self.flight_cmd = self.CMD_LEFT_L
elif keyPressed == 'Key.right':
self.flight_cmd = self.CMD_RIGHT_L
else:
self.flight_cmd = self.CMD_HOVER
def _on_release(self, key):
self.flight_cmd = self.CMD_HOVER
return
def _cmd_rx(self):
while True:
try:
data, server = self.sock_cmd.recvfrom(1518)
print('Rx: ' + str(data))
except Exception as e:
print(e)
break
def _cmd_tx(self, cmd):
if type(cmd) == bytes:
cmd = cmd
self.sock_cmd.sendto(cmd, self.addr_cmd_tx)
#print('Tx: ' + str(cmd))
elif type(cmd) == list:
if len(cmd) == 11:
s = self.S11
elif len(cmd) == 12:
s = self.S12
elif len(cmd) == 22:
s = self.S22
else:
return
#print('Tx: unknown format')
if s:
cmd = s.pack(*cmd)
self.sock_cmd.sendto(cmd, self.addr_cmd_tx)
#print('Tx: ' + str(cmd))
def _flight_ctrl(self):
cmd = list(self.flight_cmd)
now = datetime.datetime.now()
h = now.hour
m = now.minute
s = now.second
ms = round(now.microsecond / 1000)
cmd.append(h)
cmd.append(m)
cmd.append(s)
cmd.append(ms & 0xff)
cmd.append(ms >> 8)
buf = bytearray()
for b in cmd:
buf.append(b)
crc16 = self._calc_crc16(buf, len(buf))
cmd.append(crc16 & 0xff)
cmd.append(crc16 >> 8)
self._cmd_tx(cmd)
if not self.stop_drone:
t = Timer(0.02, self._flight_ctrl)
t.start()
def _req_iframe(self):
cmd = list(self.CMD_REQ_IFRAME)
self._cmd_tx(cmd)
if not self.stop_drone:
t = Timer(1, self._req_iframe)
t.start()
else:
self.sock_cmd.close()
def _fwd_video(self):
self.sock_video = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
self.addr_video = (self.LOCAL_IP, self.TELLO_PORT_VIDEO)
self.sock_video.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
self.sock_video.settimeout(.5)
self.sock_video.bind(self.addr_video)
self.sock_fwd = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
self.addr_fwd = (self.LOCAL_IP, self.LOCAL_PORT_VIDEO)
self.sock_fwd.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
self.sock_fwd.settimeout(.5)
data = bytearray(4096)
slice = bytearray()
isSps = False
while not self.stop_drone:
try:
size, addr = self.sock_video.recvfrom_into(data)
except socket.timeout:
time.sleep(.5)
continue
except socket.error as e:
print(e)
break
else:
if size > 6 and data[2] == 0x00 and data[3] == 0x00 and data[4] == 0x00 and data[5] == 0x01:
nal_type = data[6] & 0x1f
if nal_type == 7:
isSps = True
if isSps:
self.sock_fwd.sendto(data[2:size], self.addr_fwd)
self.sock_video.close()
self.sock_fwd.close()
def _calc_crc16(self, buf, size):
i = 0
seed = 0x3692
while size > 0:
seed = self.TBL_CRC16[(seed ^ buf[i]) & 0xff] ^ (seed >> 8)
i = i + 1
size = size - 1
return seed
参考
以下のサイトが非常に参考になりました。感謝。
Tello Control Packet Analysis 1 : 네이버블로그
Tello. Whats possible? | DJI Ryze Tello Drone Forum