今回の流れ
激安のLiDARで簡単にレーザースキャンが出来れば、気兼ね無く無茶な事にも使えて挑戦しやすい環境が構築できると考えました。そこで今回激安LiDAR Camsense X1を使ってROS上でLaserScanしてみることにしました。以下に購入したCamsense X1の写真を載せましたが、安い分だけ最初からちょっと傷が付いていたりしますが、、、まぁ構いません。
またこのLiDARでSLAMを動かすことも可能なので、別途記事を書こうと思っています。

まずは今回の内容として以下の様な流れで書かせてもらいます。
1.激安LiDARを購入
2.UART-USB変換ケーブルを購入
3.それぞれを接続する
4.ububtu上で確認してみる
5.ROS上で動かしてみる
6.まとめ
7.今後の展開
8.参考文献
1.激安LiDARを購入
以前、Aliexpressで激安で売られていた以下のLiDARを使わずに漬物となっていましたが、もったえない!と思い使ってみることにしました。(2021/5/23 PM0:00 AliExpressにて発見しリンク先変更)
https://ja.aliexpress.com/item/4001253880158.html?srcSns=sns_Copy&spreadType=socialShare&bizType=ProductDetail&social_params=20107023703&aff_fcid=d35c7d800ede4b91b19f59b58dcca145-1621739939676-04554-_mrvUGqr&tt=MG&aff_fsk=_mrvUGqr&aff_platform=default&sk=_mrvUGqr&aff_trace_key=d35c7d800ede4b91b19f59b58dcca145-1621739939676-04554-_mrvUGqr&shareId=20107023703&businessType=ProductDetail&platform=AE&terminal_id=611985eab1e9484ba8625514e7c92f81
2.UART-USB変換ケーブルを購入
このLiDARを使うに当たってUARTの端子をUSB Serialに変換して簡単に使えるよう、以下を購入しました。
https://ja.aliexpress.com/item/32967291612.html?spm=a2g0s.9042311.0.0.27424c4dSlzHH6
3.それぞれを接続する
LiDARとUART-USB変換ケーブルはこちらを参考にさせてもらいました。
6ドルの激安LiDAR(Camsense X1)を使ってみる
そして以下の写真のように接続しております。

端子が抜けやすいので以下の様なUV接着剤で接着して端子を完全に固定しました。
UV Cure Welding Compound Glue Pen
4.ububtu上で確認してみる
上記ができましたら、LiDARをUSBケーブルでPCに接続し、ubuntuを立ち上げ、認識できているか確認してみます。
ちなみに今回試した環境はubuntu18.04LTSになります。
$ ls /dev/ttyUSB*
ここでLiDAR以外に何もUSBに接続していなければ/dev/ttyUSB0と返ってくると思います。
この時以下のコマンドでUSBで接続したLiDARを動かすための権限と永続的効果を付けます。
$ sudo chmod 666 /dev/ttyUSB0
$ sudo gpasswd --add $USER dialout
上記コマンドを実行した後、再度ログインすることでLiDARを動かせるようになります。
5.ROS上で動かしてみる
ubuntu18.04LTS環境ではROS Melodicを使うことになります。ROS Melodicのインストールおよびcatkin_wsのワークスペースの作成は様々な資料がありますので各自で行って下さい。
ROS Melodicのインストールおよびcatkin_wsのワークスペースの作成が出来ましたら、ターミナルを起動しgit cloneによって以下のコードをビルドしました。
cd catkin_ws/src
git clone https://github.com/Vidicon/camsense_driver.git
cd ..
catkin_make
ビルドが通れば以下を動かせると思います
source ~/catkin_ws/devel/setup.bash
roslaunch camsense_driver view.launch
これで以下の様にLiDARからスキャンしたら情報が表示出来たと思います。
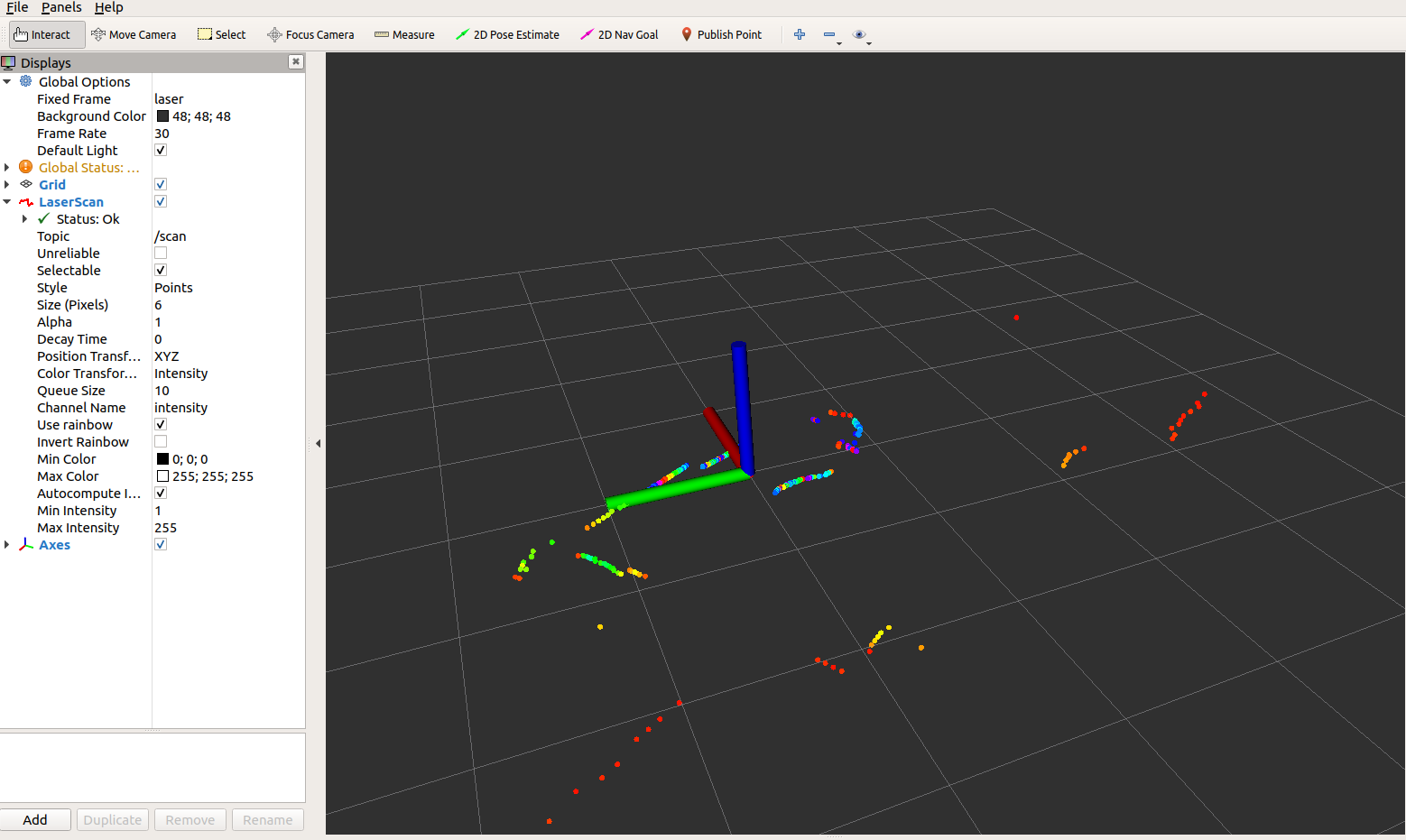
$\huge{激安なのに、結構動くじゃないか!}$
6.まとめ
これらを使えば何と約千円程度でROS上でLiDARを動かす事が出来ました!起動してからモータの動きが安定するまで結構時間が掛かる点や測定精度については疑問符も付くかも知れませんが、この安さで色々試せる環境を手に入れられるなら素晴らしいと思います!
7.今後
今後この激安LiDARを使ってSLAMを動かしてみた記事を書きますので、乞うご期待!!