
目次
- 使用環境
- 本プロジェクトについて
- ソースコードについて
-
このロボットの特徴
- 1.1 最大の特徴: 手を挙げるだけでロボットが近づいてくる
- 1.2 技術的な特徴
- 1.3 ハードウェア構成
- 1.4 使用している主要外部パッケージ
- 起動コマンド
-
システムアーキテクチャ
- 3.1 パッケージ統合とノード構成の全体像
- 3.2 主要ノード一覧と設計意図
-
TFツリー構成と配信責任
- 4.1 TFツリー全体像
- 4.2 TF配信責任の詳細
- 4.3 重要な設計ポイント
- 4.4 mapフレームの扱い
-
重要な設計思想: nvbloxをSLAMとして使用
- 5.1 設計の核心
- 5.2 nvbloxの役割
- 5.3 ZED2i Visual Odometryの役割
- 5.4 この設計のメリット
- 5.5 この設計の制約
- パッケージ詳細
-
トピック構成
- 7.1 センサートピック
- 7.2 マッピング・ナビゲーショントピック
- 7.3 制御トピック
- 起動シーケンスとタイミング
- まとめ
使用環境
本システムは以下の環境で開発・検証されています:
| 項目 | 仕様 | 備考 |
|---|---|---|
| 計算プラットフォーム | NVIDIA Jetson Orin NX 16GB | 25W MODEで動作 |
| JetPack | 6.1 | NVIDIA公式開発環境 |
| ZED SDK | 5.1.0 | Stereolabs公式SDK |
| ROS2 Distribution | Humble Hawksbill | Ubuntu 22.04 LTS |
| Isaac ROS | nvblox (ソースビルド) | NVIDIA Isaac ROSパッケージ群 |
性能プロファイル:
- メモリ使用量: システム全体で約10-12GB(16GB中)
- CPU使用率: 平均40-60%(ピーク時80%)
- GPU使用率: nvblox動作時20-30%
- 電力モード: 25W MODE(バランス型、長時間運用可能)
環境選定の理由:
- Jetson Orin NX 16GB: Isaac ROS nvbloxの推奨プラットフォーム、GPUアクセラレーション対応
- 25W MODE: 性能と消費電力のバランス、長時間運用に適している
- JetPack 6.1: 最新のCUDA/cuDNNサポート、Isaac ROS完全対応
- ZED SDK 5.1.0: Body Tracking機能強化、Jetson最適化
- Isaac ROS nvblox (ソースビルド): GPUアクセラレーション3Dマッピング、Jetson最適化ライブラリ
📌 補足: 本システムで使用している外部パッケージ(nvblox、Nav2、ZED SDKなど)の詳細については、1.4 使用している主要外部パッケージをご参照ください。
本プロジェクトについて
AI支援開発による効率化
本ロボットシステムは、Anthropic Claude Code(AI支援開発ツール)を全面的に活用して開発しました。
開発プロセス:
- システム設計: Claudeとの対話を通じて、TFツリー構造、トピック設計、ノード連携を整理
- コード実装: ROS2 launchファイル、パラメータ設定、カスタムノードの実装をClaude支援で効率化
- デバッグ: エラーログ解析、TF問題の特定、パラメータチューニングをClaudeと協働
- ドキュメント作成: 本技術書もClaudeとの対話を通じて体系的に整理・執筆
AI支援開発がもたらした価値:
-
開発時間の大幅短縮
- 従来なら数週間かかる統合作業を数日で完了
- パラメータ設定の試行錯誤を大幅に削減
-
検証に時間を投資できる
- コーディングの時間を削減し、実機での動作検証に集中
- 様々なシナリオでのテスト、パラメータの微調整に時間を使える
- 「動くだけ」から「しっかり動く」への質的向上
-
設計の一貫性
- TFツリー、トピック、パラメータの命名規則を統一
- システム全体の整合性を保ちながら開発
-
ドキュメントの充実
- 「なぜこの設計にしたのか」を言語化しやすい
- 後から見返した時に理解しやすい技術書の作成
個人開発とAIの相性:
本プロジェクトは個人開発のため、チームレビューやドキュメント整備に時間を割けません。Claudeが「もう一人の開発者」「技術レビュアー」「ドキュメンテーション担当」として機能し、一人でも高品質なシステムを構築できました。
ソースコードについて
本技術書で解説しているシステムの実装コードは、以下のGitHubリポジトリで公開されています:
📦 リポジトリ: https://github.com/motomsgit/Eclevive_robot
コードの詳細、最新の更新、セットアップ手順については上記リポジトリをご参照ください。
1. このロボットの特徴
本システムは、メカナムホイール移動ロボット上でZED2iステレオカメラ、nvblox 3Dマッピング、Nav2自律ナビゲーションを統合した人とロボットの自然なインタラクションを実現する自律移動システムです。
1.1 最大の特徴: 手を挙げるだけでロボットが近づいてくる
本ロボットの最も革新的な機能は、ZED2i Body Trackingとzed_goal_publisherを活用した人物追従機能です。
動作の流れ:
- 人物検出: ZED2iのBody Tracking機能が人物の骨格を認識
- ジェスチャー認識: 人が手を挙げる動作を検出
-
ゴール生成:
zed_goal_publisherノードが人物の位置を目標地点として自動生成 - 自律ナビゲーション: Nav2が経路を計画し、ロボットが自動的に人物に近づく
この機能の意義:
- 直感的な操作: コントローラーやアプリ不要、手を挙げるだけで呼べる
- 誰でも使える: 年齢や技術知識に関係なく、自然な動作でロボットを操作
- 日常生活での活用: 家庭内での物の運搬、移動補助、見守りなどの実用シーンを想定
- 自然なインタラクション: ロボットが「人の意図を理解して動く」体験の実現
- 技術の民主化: 高度なロボット技術を、専門知識なしで使える形で提供
1.2 技術的な特徴
1.2.1 NVIDIA Isaac ROS nvbloxによる高精度3Dマッピング
なぜnvbloxを選んだのか:
従来のSLAM Toolbox(2D SLAM)ではなく、NVIDIA Isaac ROS nvbloxを採用した理由は以下の通りです:
- 3D環境認識: TSDF(Truncated Signed Distance Field)により、単なる2D平面でなく3D空間全体をマッピング
- Jetsonとの親和性: NVIDIA GPUの並列処理能力を最大限活用、リアルタイム処理が可能
- 深度画像とLiDARの統合: ZED2iの深度画像とデュアルLiDARを同時に統合し、より密なマップを生成
- Nav2完全互換: Occupancy Gridを生成し、既存のNav2スタックとシームレスに連携
設計の想い:
「ロボットが人間のように環境を3次元で理解する」ことを目指しました。床の段差、天井の高さ、障害物の形状を正確に把握することで、より安全で自然な移動を実現します。
1.2.2 ZED2i Visual Odometryによる自己位置推定
なぜAMCLを使わないのか:
一般的なROS2ナビゲーションではAMCL(パーティクルフィルタ)による自己位置推定が主流ですが、本システムではZED2i Visual Odometryのみを使用しています。
その理由:
- 高周波数: ZED2iは60Hzで高精度なオドメトリを配信、AMCLの10Hz程度より滑らか
- 計算コスト削減: パーティクルフィルタ(数千のパーティクル計算)が不要、Jetsonの計算リソースを節約
- ループクロージャ機能: ZED2iは既知エリアへの復帰を自動認識し、累積誤差を補正
- IMU統合: ZED2i内蔵IMU(200Hz)との融合により、急な動きにも対応
設計の想い:
「センサーの能力を信じ、シンプルに構成する」という哲学です。ZED2iのVisual SLAMは非常に高精度であり、わざわざAMCLで二重に位置推定する必要がないと判断しました。
1.2.3 デュアルLiDARによる360°障害物検知
なぜ前後2つのLiDARを使うのか:
単一LiDARではなく、前後に2つのLiDARを配置した理由:
- 完全な360°カバレッジ: 前方180° + 後方180° = 360°の死角なし検知
- メカナムホイールの特性: 全方位移動が可能なため、後方への移動時も障害物検知が必須
- 安全性の向上: 人が後ろから近づいた場合も即座に検知、衝突回避
-
scan_toolsパッケージで統合: 2つのスキャンを1つの360°スキャンに統合し、Nav2に供給
設計の想い:
「どの方向に動いても安全」を最優先しました。人がいる環境で動くロボットは、常に周囲に気を配る必要があります。
1.2.4 Nav2 MPPI Controllerによる全方位移動
なぜMPPIコントローラーを選んだのか:
DWB(Dynamic Window Approach)ではなく、MPPI(Model Predictive Path Integral)コントローラーを採用:
-
メカナムホイール対応:
motion_model: "Omni"でオムニディレクショナル移動を完全サポート - サンプルベース最適化: 2000個の軌道候補から最適解を選択、滑らかな動き
- リアルタイム障害物回避: 予測的制御により、動的障害物にも柔軟に対応
- パラメータチューニング: 速度、加速度、障害物回避のバランスを細かく調整可能
設計の想い:
「人の近くで動くロボットは、予測可能で滑らかな動きをすべき」という考えです。MPPIの予測的制御により、急な動きを避け、人が安心して近づけるロボットを目指しました。
1.2.5 PS5コントローラーとBody Trackingの二重インターフェース
なぜ2つの操作方法を用意したのか:
- PS5コントローラー: デバッグ時の遠隔操作、パラメータ調整時の細かい動作確認
- Body Tracking(手を挙げる): 自然なインタラクション、ロボットを「呼ぶ」
設計の想い:
「開発とユーザー体験の両立」を重視しました。PS5コントローラーは開発時のデバッグ性向上のために不可欠です。システムの動作確認、センサーのキャリブレーション、パラメータ調整時には細かい操作が必要です。一方、実際の使用時には手を挙げるだけの自然な操作で使える、という両立を目指しています。
デバッグ性の重要性:
個人開発では「問題が起きた時に素早く原因を特定できる」ことが何より重要です。PS5コントローラーによる手動制御があることで、自律機能に問題が起きても即座に介入でき、ログを確認しながら原因を切り分けられます。
1.3 ハードウェア構成
| コンポーネント | 型番・仕様 | 役割 | 選定理由 |
|---|---|---|---|
| プラットフォーム | NVIDIA Jetson (Linux 5.15.148-tegra) | 計算プラットフォーム | Isaac ROSの完全サポート、GPUによる並列処理 |
| ロボット | メカナムホイール | 全方位移動 | 狭い空間での機動性、その場回転が可能 |
| ステレオカメラ | ZED2i | Visual Odometry + 深度画像 + Body Tracking | オールインワンセンサー、Body Tracking標準搭載 |
| LiDAR | 前方LiDAR + 後方LiDAR | 360°障害物検知 | 全方位移動に対応した完全な周囲認識 |
| コントローラー | PS5 DualSense | デバッグ・開発用遠隔操作 | 直感的な操作性、低遅延のBluetooth接続 |
1.4 使用している主要外部パッケージ
本システムは、オープンソースのROS2パッケージを活用して構築されています。GitHubリポジトリのセットアップスクリプトで自動インストール可能です。
外部パッケージ一覧
| カテゴリ | パッケージ名 | 提供元 | 役割 |
|---|---|---|---|
| 3Dマッピング | nvblox | NVIDIA Isaac ROS | GPU加速3D TSDF マッピング + Occupancy Grid生成 |
| ナビゲーション | Navigation2 | ROS2公式 | 経路計画(Planner)、経路追従(Controller)、Behavior Tree |
| センサードライバ | zed_wrapper | Stereolabs | ZED2iカメラ統合(Visual SLAM, 深度, Body Tracking) |
| LiDARドライバ | ldlidar_stl_ros2 | LDROBOT | 前後LiDARドライバ(前方・後方とも同一パッケージ) |
| センサー統合 | laser_scan_merger | scan_tools | 複数LiDARスキャンの360°統合 |
| センサー処理 | laser_filters | ROS2公式 | スキャンフィルタリング(範囲、強度、欠測除去) |
自作パッケージ(統合レイヤー)
本リポジトリには、外部パッケージを統合するための薄いラッパーパッケージが含まれています:
| パッケージ名 | 役割 | 備考 |
|---|---|---|
| bringup | 統合launchファイル、パラメータ設定 | システム全体の起動を1コマンドで実現 |
| zed_goal_publisher | Body Tracking→Nav2ゴール変換 | ジェスチャー認識を位置指令に変換 |
| joy_mecanum_controller | PS5コントローラー→速度指令変換 | メカナムホイール用全方位制御 |
| mark3_urdf | ロボットモデル定義 | TF静的配信、ロボット形状 |
| zed_zupt_wrapper | ZEDオドメトリZUPTフィルタ | 静止時のドリフト抑制 |
設計思想: 外部パッケージは「そのまま使う」ことを基本とし、統合のための薄いラッパーのみを自作。これにより外部パッケージの更新を容易に取り込め、デバッグの切り分けも明確になります。
2. 起動コマンド
2.1 メインシステム起動
ros2 launch bringup zed2i_nvblox_nav2_launch.py
このコマンドで以下が起動します:
- ZED2iノード - Visual Odometry + 深度画像 + Body Tracking(人物追従の核)
- zed_goal_publisherノード - Body Trackingから目標地点を自動生成
- nvbloxノード - 3Dマッピング + Occupancy Grid生成(環境理解)
- LiDARマージ・フィルタリングノード - 360°障害物検知
- Nav2ナビゲーションスタック - Planner + Controller + Behavior Tree(自律ナビゲーション)
- PS5コントローラーインターフェース - デバッグ・開発用手動制御
- RViz2可視化 - デバッグ・モニタリング
設計の意図:
たった1つのコマンドで、センサー統合からナビゲーションまでの全システムが起動します。これは「ユーザーが複雑な起動手順を意識しなくて良い」という思想に基づいています。内部では複雑な依存関係がありますが、外からは「シンプルに使える」ことを重視しました。
2.2 起動ファイル構成
zed2i_nvblox_nav2_launch.py (メイン)
└─ zed2i_nvblox_fixed.launch.py (センサー統合 + Body Tracking + zed_goal_publisher)
└─ bringup_launch.py (Nav2スタック) [8秒遅延起動]
なぜ8秒の遅延を入れたのか:
Nav2は/mapトピック(Occupancy Grid)が配信されていることを前提に動作します。nvbloxがマップを生成するまでに数秒かかるため、Nav2を先に起動するとエラーで停止します。この8秒の遅延により、以下のシーケンスを確実に実行:
- 0秒: ZED2i起動(特徴点検出開始)
- 2秒: ZED2iオドメトリが安定
- 4秒: nvblox起動(ZED2iポーズを受信してマッピング開始)
- 6秒: マップ生成が安定
- 8秒: Nav2起動(マップが確実に利用可能)
「起動の失敗を防ぐための確実なタイミング設計」です。
3. システムアーキテクチャ
3.1 パッケージ統合とノード構成の全体像
本システムは、外部パッケージ(NVIDIA Isaac ROS、Nav2、ZED SDK)と自作パッケージ(統合レイヤー)を組み合わせた階層構造で設計されています。
3.1.1 パッケージ階層図
┌─────────────────────────────────────────────────────────────┐
│ Hardware Layer (Physical Sensors & Actuators) │
│ ZED2i Camera | Front LiDAR | Back LiDAR | Mecanum Wheels │
└─────────────────────────────────────────────────────────────┘
↓
┌─────────────────────────────────────────────────────────────┐
│ Driver Layer (External Packages) │
│ ┌──────────────┐ ┌──────────────────────────────────┐ │
│ │ zed_wrapper │ │ ldlidar_stl_ros2 (LDROBOT) │ │
│ │ (Stereolabs) │ │ 前方・後方LiDAR共通ドライバ │ │
│ └──────────────┘ └──────────────────────────────────┘ │
└─────────────────────────────────────────────────────────────┘
↓
┌─────────────────────────────────────────────────────────────┐
│ Perception & Mapping Layer (Isaac ROS + Custom) │
│ ┌─────────────────────────────────────────────────────┐ │
│ │ nvblox_container (Component Container) │ │
│ │ ┌──────────┐ ┌─────────┐ ┌──────────────────┐ │ │
│ │ │ ZED2i │→ │ nvblox │→ │ zed_goal_ │ │ │
│ │ │ Node │ │ Node │ │ publisher │ │ │
│ │ │ (外部) │ │ (Isaac) │ │ (自作) │ │ │
│ │ └──────────┘ └─────────┘ └──────────────────┘ │ │
│ └─────────────────────────────────────────────────────┘ │
│ ┌──────────────┐ ┌─────────────────────────────────┐ │
│ │ LiDAR Merge │→ │ Scan Filter │ │
│ │ (scan_tools) │ │ (laser_filters) │ │
│ └──────────────┘ └─────────────────────────────────┘ │
└─────────────────────────────────────────────────────────────┘
↓
┌─────────────────────────────────────────────────────────────┐
│ Navigation Layer (Nav2 Stack) │
│ ┌──────────────┐ ┌──────────────┐ ┌────────────────┐ │
│ │ Planner │ │ Controller │ │ BT Navigator │ │
│ │ Server │ │ Server │ │ │ │
│ │ (Nav2) │ │ (Nav2) │ │ (Nav2) │ │
│ └──────────────┘ └──────────────┘ └────────────────┘ │
└─────────────────────────────────────────────────────────────┘
↓
┌─────────────────────────────────────────────────────────────┐
│ Control Layer (Custom Integration) │
│ ┌──────────────────────┐ ┌────────────────────────────┐ │
│ │ joy_mecanum_ │→ │ /cmd_vel → Wheel Control │ │
│ │ controller (自作) │ │ │ │
│ └──────────────────────┘ └────────────────────────────┘ │
└─────────────────────────────────────────────────────────────┘
凡例:
- (外部): 外部提供パッケージ(そのまま使用)
- (Isaac): NVIDIA Isaac ROSパッケージ(ソースビルド)
- (Nav2): ROS2公式Navigation2パッケージ
- (自作): 本リポジトリで開発した統合レイヤー
3.1.2 データフロー付き詳細ノード構成図
┌───────────────────────────────────────────────────────────────┐
│ nvblox_container (Component Container - Low Latency) │
│ │
│ /zed/zed_node (zed_wrapper) │
│ ├─ Visual Odometry → /zed/zed_node/odom (60Hz) │
│ ├─ 6DOF Pose → /zed/zed_node/pose (60Hz) │
│ ├─ Depth Image → /zed/zed_node/depth/depth_registered (15Hz)│
│ ├─ RGB Image → /zed/zed_node/rgb/image_rect_color (15Hz) │
│ ├─ Body Tracking → /zed/zed_node/body_trk/skeletons (15Hz) │
│ └─ TF: odom → zed_camera_origin (60Hz) │
│ ↓ ↓ ↓ │
│ /nvblox_node (nvblox_ros - Isaac ROS) │
│ ├─ Input: Pose + Depth + RGB + /scan_filtered │
│ ├─ 3D TSDF Mapping (GPU Accelerated) │
│ └─ Output: /map (OccupancyGrid, 5Hz) │
│ ↓ ↓ │
│ /zed_goal_publisher (Custom) │
│ ├─ Input: Body Tracking Skeletons │
│ ├─ Gesture Recognition (Hand Raised Detection) │
│ └─ Output: /goal_pose (PoseStamped) │
└───────────────────────────────────────────────────────────────┘
↓
┌───────────────────────────────────────────────────────────────┐
│ LiDAR Processing Pipeline (External Packages) │
│ │
│ /front_lidar_node (ldlidar_stl_ros2) │
│ └─ /front_scan (LaserScan, 30Hz, 180°) │
│ ↓ │
│ /back_lidar_node (ldlidar_stl_ros2) │
│ └─ /back_scan (LaserScan, 30Hz, 180°) │
│ ↓ │
│ /lidar_merge_node (laser_scan_merger) │
│ ├─ Input: /front_scan + /back_scan │
│ └─ Output: /merged_scan (LaserScan, 30Hz, 360°) │
│ ↓ │
│ /scan_filter_node (laser_filters) │
│ ├─ Range Filter: 0.1m - 20m │
│ ├─ Intensity Filter + Nan Removal │
│ └─ Output: /scan_filtered (LaserScan, 30Hz) │
└───────────────────────────────────────────────────────────────┘
↓
┌───────────────────────────────────────────────────────────────┐
│ Nav2 Navigation Stack (nav2_*) │
│ │
│ /planner_server │
│ ├─ Plugin: SmacPlannerHybrid (Hybrid A*) │
│ ├─ Input: /map + /goal_pose + odom TF │
│ └─ Output: /plan (Path, 20Hz) │
│ ↓ │
│ /controller_server │
│ ├─ Plugin: MPPIController (Omni Motion Model) │
│ ├─ Input: /plan + /odom + /scan_filtered + odom TF │
│ ├─ Samples: 2000 trajectories per cycle │
│ └─ Output: /cmd_vel (Twist, 30Hz) │
│ ↓ │
│ /bt_navigator │
│ ├─ Behavior Tree: navigate_to_pose_w_replanning │
│ ├─ Recovery: ClearCostmap → Spin → BackUp │
│ └─ Goal Status Management │
└───────────────────────────────────────────────────────────────┘
↓
┌───────────────────────────────────────────────────────────────┐
│ Robot Control Layer (Custom + Hardware Interface) │
│ │
│ /ps5_controller_node (joy_mecanum_controller) │
│ ├─ Input: PS5 DualSense (Bluetooth) │
│ ├─ Mecanum Wheel Kinematics (Vx, Vy, Wz) │
│ └─ Output: /cmd_vel (Manual Override) │
│ ↓ │
│ /cmd_vel → Hardware Driver (Mecanum Wheel Controller) │
│ ├─ FL, FR, BL, BR Wheel Speed Commands │
│ └─ Mecanum Inverse Kinematics │
└───────────────────────────────────────────────────────────────┘
3.1.3 アーキテクチャの設計思想
このシステムは5層構造で設計されています:
-
Hardware Layer(最下層): 物理センサーとアクチュエータ
- ZED2i、LiDAR、メカナムホイール
-
Driver Layer: センサードライバ(外部パッケージ)
- zed_wrapper、ldlidar_stl_ros2(前後LiDAR共通)
- 役割分担: ハードウェア固有の通信・データ取得に専念
-
Perception & Mapping Layer: 環境認識と自己位置推定
- nvblox (Isaac ROS): GPU加速3Dマッピング
- ZED2i Visual SLAM: 高精度オドメトリ
- LiDAR統合: 360°障害物検知
- zed_goal_publisher (自作): ジェスチャー→ゴール変換
-
Navigation Layer: 経路計画と制御(Nav2)
- Planner: 大域経路計画(Hybrid A*)
- Controller: 局所経路追従(MPPI)
- BT Navigator: 高レベル判断とリカバリ
-
Control Layer: 実行制御(自作統合)
- joy_mecanum_controller: PS5コントローラー統合
- cmd_vel統合: ナビゲーション/手動制御の切り替え
なぜComponent Containerを使うのか:
ZED2i、nvblox、zed_goal_publisherを同一プロセス(nvblox_container)内で動作させることで:
- 低レイテンシ: プロセス間通信が不要、共有メモリで高速データ転送
- リソース効率: Jetsonの限られたメモリ・CPUを効率的に使用
- 同期性: センサーデータ→マッピング→ゴール生成の一連の処理がスムーズ
外部パッケージと自作パッケージの役割分担:
- 外部パッケージ: 汎用的な機能(センサードライバ、マッピング、ナビゲーション)
- 自作パッケージ: 統合レイヤー(ジェスチャー認識、パラメータ調整、起動管理)
- 利点: 外部パッケージの更新を容易に取り込め、デバッグの切り分けが明確
3.2 主要ノード一覧と設計意図
| ノード名 | パッケージ | 役割 | なぜこのノードが必要か |
|---|---|---|---|
/zed/zed_node |
zed_wrapper | Visual Odometry、深度画像、RGB画像、IMU、Body Tracking、TF配信 | 本システムの中核センサー。1つのノードで位置推定、環境認識、人物認識の3役をこなす。ZED2iを選んだ最大の理由。 |
/zed/zed_zupt_filter_node |
zed_wrapper | Zero-velocity UPdaTe filter(オドメトリ安定化) | ロボットが静止中にオドメトリがドリフトするのを防ぐ。「止まっている時は本当に止まっている」ことを保証し、マップのずれを防止。 |
/nvblox_node |
nvblox_ros | 3D TSDF構築、Occupancy Grid生成、ESDF計算 | 3D SLAMの心臓部。深度画像とLiDARを統合し、Nav2が使える2D Occupancy Gridを生成。Jetson GPUを活かすために選択。 |
/zed_goal_publisher |
bringup | Body Trackingジェスチャーから目標位置生成 | 人物追従機能の実現。手を挙げる→ゴール生成の橋渡し役。このノードがあることで「手を挙げるだけで呼べる」が実現。 |
/planner_server |
nav2_planner | SmacPlannerHybridによる大域経路計画 | Hybrid A*で滑らかな経路を生成。メカナムホイールの動きに適した経路計画。障害物を避けつつ最短経路を探索。 |
/controller_server |
nav2_controller | MPPIコントローラーによる局所経路追従 | メカナムホイール専用の全方位制御。2000個の軌道候補から最適解を選び、人が近くにいても安全で予測可能な動き。 |
/bt_navigator |
nav2_bt_navigator | Behavior Treeによるナビゲーション制御 | 「ゴール到達できない時の再計画」「障害物回避」などの高レベル判断。ロボットが「賢く振る舞う」ための脳。 |
/lidar_merge_node |
scan_tools | 前後LiDAR統合(360°スキャン生成) | 2つのLiDARスキャンを1つの360°スキャンに統合。Nav2は単一スキャンを期待するため、この統合が必須。 |
/scan_filter_node |
laser_filters | スキャンフィルタリング(範囲・強度・欠測除去) | LiDARのノイズ除去。床反射、ガラス反射などの誤検出を除去し、Nav2に「きれいなデータ」を供給。 |
/ps5_controller_node |
ps5_controller | PS5コントローラー入力処理 | デバッグ性の向上。開発中のパラメータ調整、動作確認、問題発生時の即座の介入。個人開発では素早い問題切り分けが重要。 |
4. TFツリー構成と配信責任
4.1 TFツリー全体像
map (nvbloxがグローバル座標系として使用)
↓ [ZED2i Visual SLAM: odom → zed_camera_origin]
odom (ZED2iが配信するオドメトリフレーム)
↓ [ZED2i: zed_camera_origin → zed_camera_link]
zed_camera_origin (中間オドメトリフレーム)
↓
zed_camera_link (カメラ原点・ロボット基準点)
├─ base_link (static TF: ロボット幾何中心)
├─ front_lidar (static TF: 前方LiDAR位置)
├─ back_lidar (static TF: 後方LiDAR位置)
├─ zed_left_camera_frame (ZED左カメラ)
├─ zed_right_camera_frame (ZED右カメラ)
└─ zed_imu_link (ZED IMU)
4.2 TF配信責任の詳細
| 変換 | 配信ノード | 配信タイプ | パラメータ設定 | 説明 |
|---|---|---|---|---|
odom → zed_camera_origin |
/zed/zed_node |
動的TF |
map_frame: 'odom'odometry_frame: 'zed_camera_origin'publish_tf: true
|
ZED2i Visual Odometry カメラ移動を計測してオドメトリを配信 |
zed_camera_origin → zed_camera_link
|
/zed/zed_node |
静的TF | (自動配信) | カメラ内部フレーム変換 |
zed_camera_link → base_link
|
static_transform_publisher |
静的TF |
xyz: [0, 0, 0]rpy: [0, 0, 0]
|
ロボット幾何中心への変換 |
zed_camera_link → front_lidar
|
static_transform_publisher |
静的TF | xyz: [0.15, 0, 0.1] |
前方LiDAR位置 |
zed_camera_link → back_lidar
|
static_transform_publisher |
静的TF |
xyz: [-0.15, 0, 0.1]rpy: [0, 0, 3.14159]
|
後方LiDAR位置(180°回転) |
4.3 重要な設計ポイント
4.3.1 ZED2iのフレーム設定(critical)
# common_stereo_isaac.yaml
pos_tracking:
publish_tf: true # TF配信を有効化
publish_map_tf: true # map→odom TFを配信(★重要★)
map_frame: 'odom' # ★★★最重要★★★
odometry_frame: 'zed_camera_origin' # 中間オドメトリフレーム
この設定の意味:
- ZED2iは
map_frame: 'odom'に設定されているため、内部的に「odom」フレームをグローバル基準点として扱う - ZED2iはVisual SLAMで推定した「odomからzed_camera_originへの変換」を配信
publish_map_tf: trueにより、ZED2iは実際にはodom → zed_camera_originのTFを配信する- nvbloxは別途
global_frame: 'map'を使用してOccupancy Gridを生成
4.3.2 なぜ map_frame: 'odom' なのか? - ドリフト抑制の重要性
通常のZED2i使用方法との違い:
本システムの設定は、ZED2iの一般的な使い方とは明らかに異なります。通常は以下のように設定することが多いです:
# 一般的な設定(本システムでは採用していない)
pos_tracking:
map_frame: 'map' # ZED2i内部でmapを生成
odometry_frame: 'odom' # odomフレームを直接配信
publish_map_tf: true # map→odomを配信
しかし、本システムではあえて異なる設定を採用しています:
# 本システムの設定(ドリフト抑制のため)
pos_tracking:
map_frame: 'odom' # ★ZED2i内部の「map」を'odom'として扱う
odometry_frame: 'zed_camera_origin' # ★中間フレームを生成
publish_map_tf: true # odom→zed_camera_originを配信
この設計の技術的理由:
-
odometry_frame: 'zed_camera_origin'の問題点- ZED2iの
zed_camera_originフレームは、純粋なVisual Odometryの原点 - このフレームを直接使うと、ドリフトが非常に大きい
- 累積誤差が時間とともに増大し、マップとのずれが発生
- ZED2iの
-
map_frame: 'odom'による解決- ZED2i内部で生成される「map」(Visual SLAMで補正されたフレーム)を、外部に対して
odomという名前で配信 - ZED2i内部のループクロージャ機能により、原点のドリフトが大幅に抑制される
- ZED2i内部で自己位置推定が完結し、高精度な
odomフレームを外部に提供
- ZED2i内部で生成される「map」(Visual SLAMで補正されたフレーム)を、外部に対して
-
zed_camera_originは中間フレーム-
zed_camera_originは、ZED2i内部で使われる中間的なフレーム -
odom(ZED2i内部のmap) →zed_camera_origin(Visual Odometry原点)の変換で、ドリフト補正が適用される - 外部パッケージ(nvblox、Nav2)は、この補正済みの
odomフレームを使用
-
なぜこの設計が重要か:
-
他パッケージへの受け渡しが容易
- nvbloxは
odomフレームを基準に動作できる - Nav2も
odomフレームを基準に経路追従できる - すべてのパッケージが同じ
odomフレームを共有し、整合性が保たれる
- nvbloxは
-
原因の切り分けが容易
- ZED2iの自己位置推定が独立して完結
- 問題発生時、「ZED2iのオドメトリ自体に問題があるのか」「Nav2の経路追従に問題があるのか」を明確に切り分けられる
- デバッグ時の効率が大幅に向上
-
自己位置精度の向上
- ZED2i内部のループクロージャ機能が有効に働く
-
zed_camera_originの生のオドメトリよりも、odom(ZED2i内部のmap)の方が精度が高い - 長時間運用でもドリフトが少ない
この設計により実現される分離:
-
ZED2i:
odomフレーム(内部mapを'odom'として配信)- ドリフト抑制済み(ループクロージャ適用後)
- 高周波数(30Hz)
- 滑らかな動き
- 自己完結した高精度な位置推定
-
nvblox:
mapフレームを基準にしたグローバルマップを生成- ZED2iの
odomを基準に3Dマッピング - Occupancy Gridを生成(Nav2互換)
- TF配信の責任なし(純粋なマッピングに専念)
- ZED2iの
-
Nav2:
mapフレームでゴール指定、odomフレームで経路追従- Planner:
mapフレームで大域経路計画 - Controller:
odomフレーム(ZED2i補正済み)で局所経路追従 - 高精度なオドメトリによる滑らかな動き
- Planner:
4.4 mapフレームの扱い
重要: 現在の構成では、map フレームはnvbloxが Occupancy Grid生成時の基準座標系 として使用しますが、map→odomのTF変換は配信されていません。
つまり:
- nvbloxは
global_frame: 'map'でOccupancy Gridを/mapトピックに配信 - しかし、nvbloxは
map → odomのTF変換を配信しない - Nav2は
mapフレーム上でゴールを受け取り、odomフレームで経路を追従
この設計の利点:
- ZED2i Visual Odometryの高周波数・高精度を活かせる
- nvbloxは純粋にマッピングに専念(TF配信の責任なし)
- Nav2は
odomフレームでリアルタイムに経路追従可能
この設計の注意点:
-
mapとodomの原点が一致していることが前提 - 初期位置が重要(システム起動時にロボットが原点にいる必要がある)
- 長時間運用するとZED2iのオドメトリドリフトが蓄積する可能性
5. 重要な設計思想: nvbloxをSLAMとして使用
5.1 設計の核心
本システムの最大の特徴は、nvbloxを純粋なSLAM(Simultaneous Localization and Mapping)として使用している点です。
従来のROS2ナビゲーション:
SLAM Toolbox → /map (Occupancy Grid) + map→odom TF配信
AMCL → 自己位置推定(パーティクルフィルタ)
Nav2 → 経路計画・追従
本システム:
nvblox → /map (Occupancy Grid) ※TF配信なし
ZED2i Visual Odometry → odom→zed_camera_origin TF配信
Nav2 → 経路計画・追従(AMCLは未使用)
5.2 nvbloxの役割
5.2.1 入力データ
nvbloxは以下のデータを統合してマップを構築:
-
ZED2i深度画像 (
/zed/zed_node/depth/depth_registered)- 解像度: 720x404
- レート: 15 Hz
- 範囲: 0.3m~20m
-
ZED2i RGB画像 (
/zed/zed_node/rgb/image_rect_color)- 色情報によるTSDF品質向上
-
ZED2iポーズ (
/zed/zed_node/pose)- Visual SLAMによる6DOFポーズ
- nvbloxはこのポーズを使ってセンサーデータを統合
-
LiDARスキャン (
/scan_filtered)- デュアルLiDAR統合(360°カバレッジ)
- レート: 30 Hz
- 範囲: 0.1m~20m
5.2.2 出力データ
-
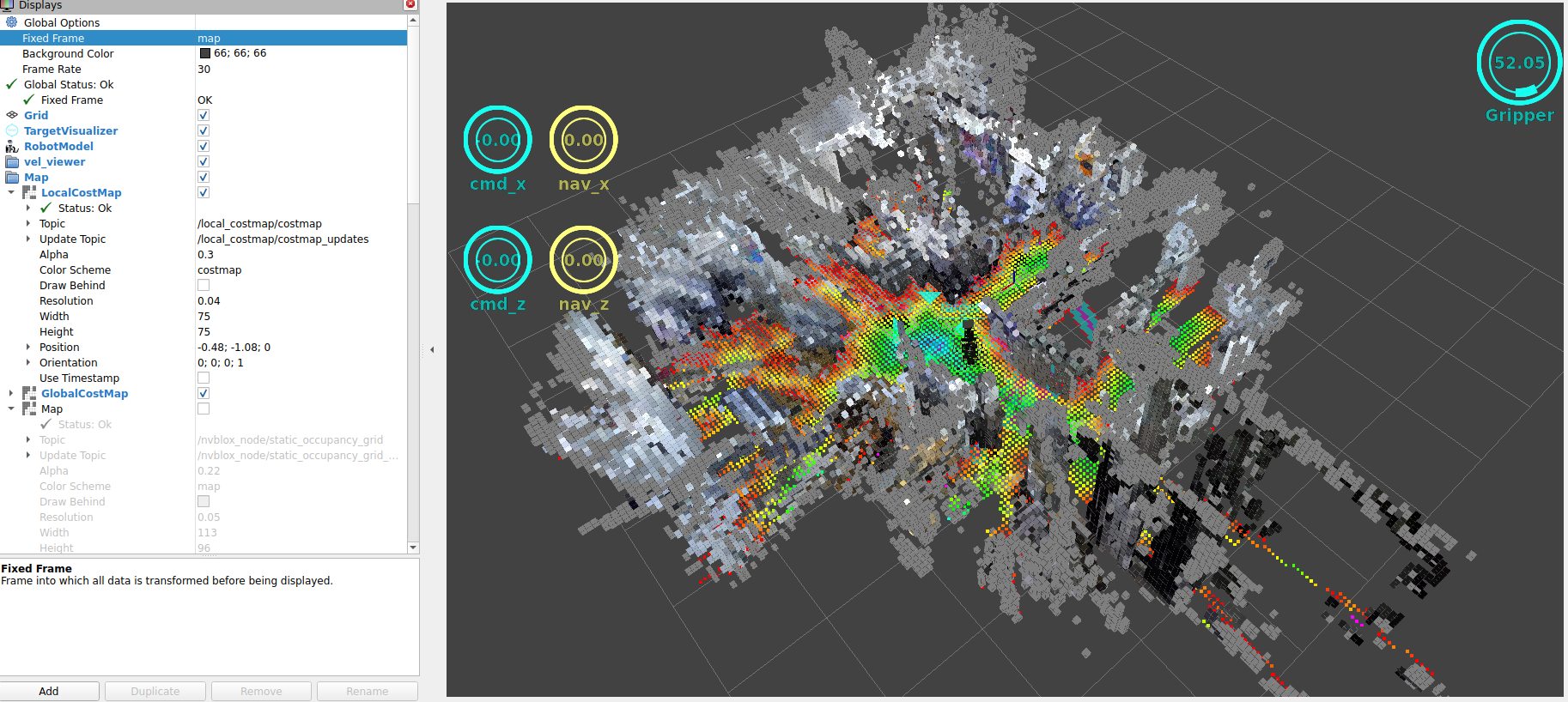
Occupancy Grid (
/map)- 解像度: 5cm (voxel_size: 0.05)
- 更新頻度: 5 Hz
- 形式:
nav_msgs/OccupancyGrid(Nav2互換) - 座標系:
mapフレーム
-
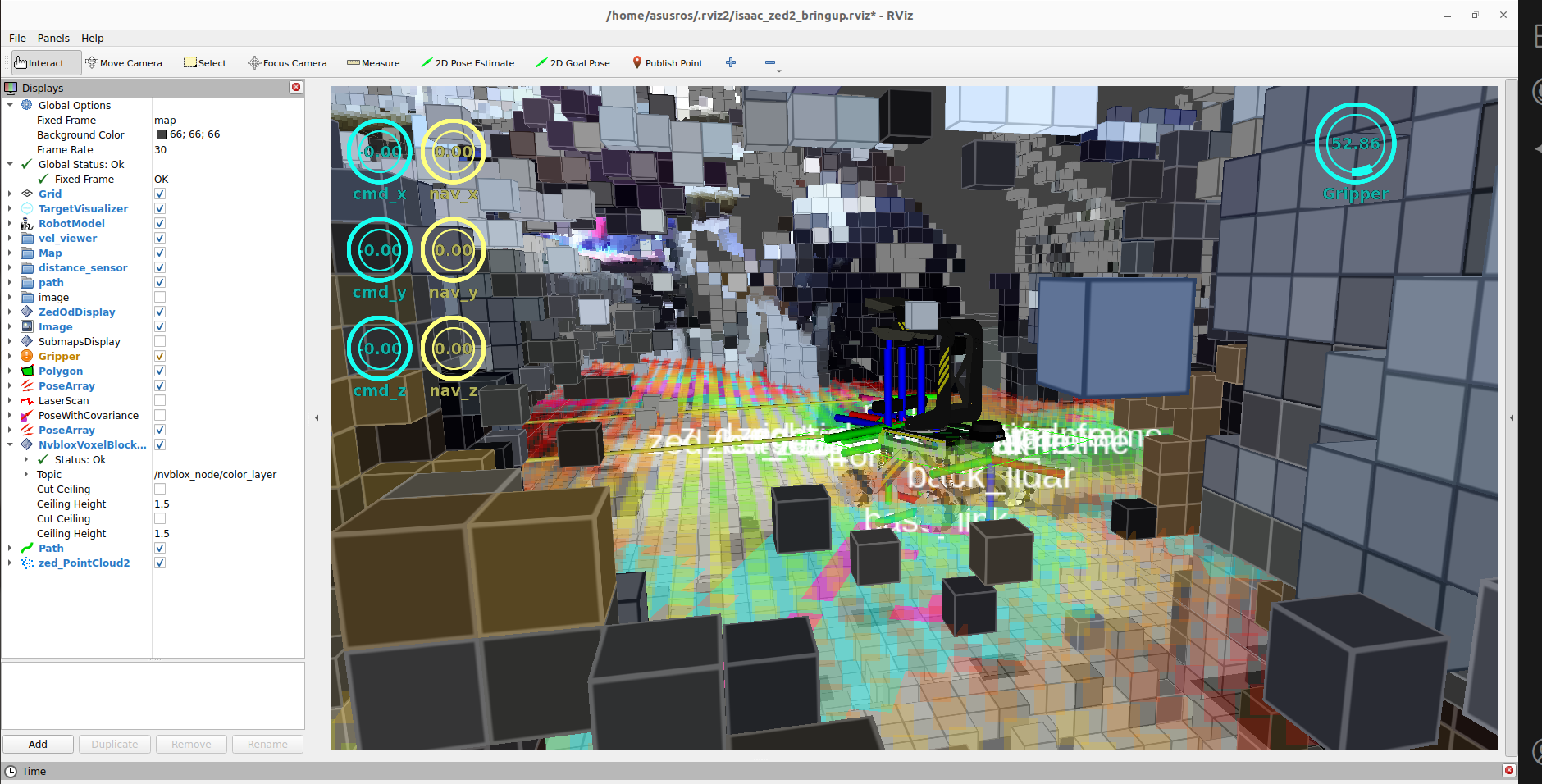
TSDF点群 (
/nvblox_node/mesh_visualization)- 3D再構成結果の可視化
-
ESDF点群 (
/nvblox_node/esdf_pointcloud)- Euclidean Signed Distance Field
- 障害物からの距離情報
5.2.3 nvbloxの設定(重要)
# nvblox_nav2_integration.yaml
global_frame: "map" # Occupancy Gridの座標系
voxel_size: 0.05 # 5cm解像度
mapping_type: "static_tsdf" # 静的環境マッピング
# LiDAR統合
use_lidar: true
lidar_width: 720
integrate_lidar_rate_hz: 30.0
# Occupancy Grid生成
publish_occupancy_layer: true
publish_layer_rate_hz: 5.0
# Occupancy確率設定
static_mapper:
free_region_occupancy_probability: 0.3 # 空き領域
occupied_region_occupancy_probability: 0.9 # 占有領域
unobserved_region_occupancy_probability: 0.5 # 未観測
5.3 ZED2i Visual Odometryの役割
ZED2iは 自己位置推定(localization) を担当:
# common_stereo_isaac.yaml
pos_tracking:
pos_tracking_enabled: true
pos_tracking_mode: 'GEN_3' # 最新アルゴリズム
imu_fusion: true # IMU統合で精度向上
# フレーム設定(★重要★)
map_frame: 'odom' # 親フレーム
odometry_frame: 'zed_camera_origin' # 子フレーム
publish_tf: true # TF配信
publish_map_tf: true # 実際はodom→zed_camera_originを配信
# SLAM機能
area_memory: true # ループクロージャ検出
save_area_memory_on_closing: true # エリアメモリ保存
reset_odom_with_loop_closure: false # オドメトリリセット無効
ZED2i Visual SLAMの特徴:
- ステレオ視覚情報とIMUを融合
- 特徴点マッチングによる高精度オドメトリ
- ループクロージャ検出(既知エリアへの復帰を認識)
map_frame: 'odom'設定により、内部mapを外部に'odom'として配信し、ドリフトを大幅に抑制
重要な設計上の工夫 - ドリフト抑制:
ZED2iのodometry_frame: 'zed_camera_origin'(純粋なVisual Odometry原点)はドリフトが非常に大きいという問題があります。そこで本システムでは:
-
ZED2i内部で自己位置推定を完結させる
-
map_frame: 'odom'により、ZED2i内部のSLAM補正済みフレーム(本来の'map')を外部に対して'odom'として配信 - ループクロージャ機能により原点のドリフトが抑制される
- 外部パッケージは、この高精度な'odom'フレームを使用
-
-
zed_camera_originは中間フレームとして扱う-
odom→zed_camera_originのTF変換に、ZED2iのSLAM補正が含まれる - nvbloxやNav2は、この補正済みの
odomフレームを基準に動作 - デバッグ時に「ZED2iの位置推定」と「Nav2の経路追従」を独立して評価可能
-
この設計により、他パッケージへのデータ受け渡しが容易になり、原因の切り分けが明確になります。
5.4 この設計のメリット
-
リアルタイム性
- ZED2iの高周波数オドメトリ(30Hz)でスムーズな経路追従
- nvbloxは低周波数(5Hz)でマップ更新(計算負荷軽減)
-
高精度マッピング
- nvbloxのTSDF手法により滑らかな3Dマップ
- 深度画像とLiDARの統合で環境全体をカバー
-
ドリフト抑制
map_frame: 'odom'設定により、ZED2i内部のSLAM補正を活用-
zed_camera_originの生オドメトリよりも高精度 - 長時間運用でもドリフトが少ない
-
シンプルな構成
- AMCLが不要(パーティクルフィルタの計算コスト削減)
- SLAM Toolboxが不要(nvbloxがマッピングを担当)
-
柔軟性とデバッグ性
- ZED2iとnvbloxの役割が明確に分離
- 各コンポーネントを独立して調整可能
- 問題発生時の原因切り分けが容易(ZED2iのオドメトリ自体を評価可能)
5.5 この設計の制約
-
初期位置の重要性
- システム起動時にロボットが原点(map座標系の原点≈odom座標系の原点)にいる必要
- 起動後に大きく移動してからの再起動は位置ずれの原因
-
長時間運用のドリフト
-
map_frame: 'odom'設定によりドリフトは大幅に抑制されているが、完全にゼロではない - 数時間の連続運用では若干の位置ずれが発生する可能性
-
対策: ループクロージャ機能(
area_memory: true)により、既知エリアへの復帰時に自動補正
-
-
map↔odom変換の不在
- nvbloxは
map → odomのTFを配信しない - Nav2のAMCLのような「地図上での自己位置補正」は行われない
-
前提:
mapとodomの原点が常に一致
- nvbloxは
6. パッケージ詳細
6.1 センサー統合(zed2i_nvblox_fixed.launch.py)
6.1.1 ZED2i Wrapper
パッケージ: zed_wrapper
ノード: /zed/zed_node
機能:
- Visual Odometry(odom → zed_camera_origin TF配信)
- 深度画像生成(720x404, 15Hz)
- RGB画像生成(720x404, 15Hz)
- IMUデータ配信
- Body Tracking(ジェスチャー認識)
主要トピック:
-
/zed/zed_node/odom- Visual Odometry -
/zed/zed_node/depth/depth_registered- 深度画像 -
/zed/zed_node/rgb/image_rect_color- RGB画像 -
/zed/zed_node/pose- 6DOFポーズ -
/zed/zed_node/imu/data- IMUデータ -
/zed/zed_node/body_trk/skeletons- Body Tracking結果
設定ファイル:
-
common_stereo_isaac.yaml- 共通設定 -
zed2i.yaml- ZED2iモデル固有設定
6.1.2 ZED ZUPT Filter
パッケージ: zed_wrapper
ノード: /zed/zed_zupt_filter_node
機能:
- Zero-velocity UPdaTe (ZUPT) フィルタ
- 静止時のオドメトリドリフト抑制
- IMUバイアス推定
主要トピック:
- 入力:
/zed/zed_node/odom - 出力:
/zed/zed_node/odom_zupt
6.1.3 nvblox Node
パッケージ: nvblox_ros
ノード: /nvblox_node
機能:
- TSDF(Truncated Signed Distance Field)ベース3Dマッピング
- 深度画像 + LiDARの統合マッピング
- Occupancy Grid生成(Nav2互換)
- ESDF(Euclidean Signed Distance Field)計算
主要トピック:
- 入力:
/zed/zed_node/depth/depth_registered/zed/zed_node/rgb/image_rect_color/zed/zed_node/pose/scan_filtered
- 出力:
-
/map- Occupancy Grid (nav_msgs/OccupancyGrid) -
/nvblox_node/mesh_visualization- メッシュ可視化 -
/nvblox_node/esdf_pointcloud- ESDF点群
-
設定ファイル:
-
nvblox_base.yaml- 基本設定 -
nvblox_zed.yaml- ZED統合設定 -
nvblox_extended_range.yaml- 拡張範囲設定 -
nvblox_nav2_integration.yaml- Nav2統合設定
6.1.4 LiDAR Processing
マージノード:
- パッケージ:
scan_tools - ノード:
/lidar_merge_node - 機能: 前後LiDARを360°スキャンに統合
フィルタノード:
- パッケージ:
laser_filters - ノード:
/scan_filter_node - 機能: 範囲フィルタ、強度フィルタ、欠測除去
トピック:
- 入力:
/front_scan,/back_scan - 中間:
/merged_scan - 出力:
/scan_filtered
6.1.5 zed_goal_publisher (Body Tracking→ゴール変換)
パッケージ: bringup
ノード: /zed_goal_publisher
機能:
- ZED2i Body Trackingのジェスチャー認識
- ジェスチャーを目標位置に変換
-
/goal_poseトピックに配信
設計の意図:
このノードは、ZED2iの骨格認識データから人物の位置とジェスチャーを解析し、Nav2が理解できるgeometry_msgs/PoseStamped形式のゴール位置に変換します。「手を挙げるだけでロボットが近づいてくる」という直感的なインタラクションを実現する中核ノードです。
6.2 ナビゲーション(bringup_launch.py)
6.2.1 Planner Server
パッケージ: nav2_planner
ノード: /planner_server
機能:
- 大域経路計画(start → goal)
- SmacPlannerHybrid使用(Hybrid A*アルゴリズム)
- Occupancy Gridベースの計画
主要トピック:
- 入力:
/map,/goal_pose - 出力:
/plan
設定:
planner_server:
ros__parameters:
expected_planner_frequency: 20.0 # 計画頻度
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_smac_planner/SmacPlannerHybrid"
tolerance: 0.5 # ゴール許容誤差
downsample_costmap: false
downsampling_factor: 1
6.2.2 Controller Server
パッケージ: nav2_controller
ノード: /controller_server
機能:
- 局所経路追従
- MPPIコントローラー(Model Predictive Path Integral)
- リアルタイム障害物回避
主要トピック:
- 入力:
/plan,/odom,/scan_filtered - 出力:
/cmd_vel
設定:
controller_server:
ros__parameters:
controller_frequency: 30.0 # 制御頻度30Hz
controller_plugins: ["FollowPath"]
FollowPath:
plugin: "nav2_mppi_controller/MPPIController"
motion_model: "Omni" # メカナムホイール用
batch_size: 2000 # サンプル数
time_steps: 56 # 予測ステップ数
iteration_count: 2 # イテレーション回数
6.2.3 BT Navigator
パッケージ: nav2_bt_navigator
ノード: /bt_navigator
機能:
- Behavior Treeによる高レベルナビゲーション制御
- エラーリカバリ(再計画、回転、後退)
- ゴール達成判定
Behavior Tree XML:
navigate_to_pose_w_replanning_and_recovery.xml
└─ FollowPath
├─ ComputePathToPose(経路計画)
├─ FollowPath(経路追従)
└─ Recovery Behaviors(エラー時)
├─ ClearCostmap(コストマップクリア)
├─ Spin(その場回転)
└─ BackUp(後退)
7. トピック構成
7.1 センサートピック
7.1.1 ZED2i関連
| トピック | 型 | 頻度 | 説明 |
|---|---|---|---|
/zed/zed_node/odom |
nav_msgs/Odometry |
60 Hz | Visual Odometry(生) |
/zed/zed_node/odom_zupt |
nav_msgs/Odometry |
60 Hz | ZUPT適用後オドメトリ |
/zed/zed_node/pose |
geometry_msgs/PoseStamped |
60 Hz | 6DOFポーズ(nvblox入力) |
/zed/zed_node/depth/depth_registered |
sensor_msgs/Image |
15 Hz | 深度画像(RGB整合済み) |
/zed/zed_node/rgb/image_rect_color |
sensor_msgs/Image |
15 Hz | RGB画像(歪み補正済み) |
/zed/zed_node/imu/data |
sensor_msgs/Imu |
200 Hz | IMUデータ |
/zed/zed_node/body_trk/skeletons |
zed_msgs/SkeletonArray |
15 Hz | Body Tracking結果 |
7.1.2 LiDAR関連
| トピック | 型 | 頻度 | 説明 |
|---|---|---|---|
/front_scan |
sensor_msgs/LaserScan |
30 Hz | 前方LiDAR生データ |
/back_scan |
sensor_msgs/LaserScan |
30 Hz | 後方LiDAR生データ |
/merged_scan |
sensor_msgs/LaserScan |
30 Hz | 360°統合スキャン |
/scan_filtered |
sensor_msgs/LaserScan |
30 Hz | フィルタ済みスキャン |
7.2 マッピング・ナビゲーショントピック
7.2.1 nvblox関連
| トピック | 型 | 頻度 | 説明 |
|---|---|---|---|
/map |
nav_msgs/OccupancyGrid |
5 Hz | Occupancy Grid(Nav2入力) |
/nvblox_node/mesh_visualization |
visualization_msgs/Marker |
1 Hz | メッシュ可視化 |
/nvblox_node/esdf_pointcloud |
sensor_msgs/PointCloud2 |
5 Hz | ESDF点群 |
/nvblox_node/static_occupancy_grid |
nav_msgs/OccupancyGrid |
5 Hz | 元のOccupancy Grid |
7.2.2 Nav2関連
| トピック | 型 | 説明 |
|---|---|---|
/goal_pose |
geometry_msgs/PoseStamped |
ナビゲーションゴール |
/plan |
nav_msgs/Path |
計画された経路 |
/cmd_vel |
geometry_msgs/Twist |
ロボット速度指令 |
/local_costmap/costmap |
nav_msgs/OccupancyGrid |
局所コストマップ |
/global_costmap/costmap |
nav_msgs/OccupancyGrid |
大域コストマップ |
7.3 制御トピック
| トピック | 型 | 説明 |
|---|---|---|
/cmd_vel |
geometry_msgs/Twist |
最終速度指令(Nav2 or PS5) |
/ps5_controller/cmd_vel |
geometry_msgs/Twist |
PS5コントローラー入力 |
/ps5_controller/joy |
sensor_msgs/Joy |
PS5生入力 |
8. 起動シーケンスとタイミング
8.1 起動フロー
t=0s: zed2i_nvblox_nav2_launch.py開始
└─ zed2i_nvblox_fixed.launch.py起動
├─ t=0s: nvblox_container起動
├─ t=0s: ZED2iノード読み込み
├─ t=2s: ZED ZUPTフィルタ読み込み
├─ t=4s: nvbloxノード読み込み
├─ t=5s: Goal Selectorノード読み込み
├─ t=0s: LiDARマージ・フィルタ起動
├─ t=0s: Static TF Publishers起動
├─ t=0s: PS5コントローラー起動
└─ t=6s: RViz2起動
t=8s: bringup_launch.py起動(Nav2スタック)
├─ Planner Server起動
├─ Controller Server起動
├─ BT Navigator起動
├─ Behavior Server起動
├─ Waypoint Follower起動
├─ Velocity Smoother起動
└─ Lifecycle Manager起動
8.2 タイミングの理由
| 遅延 | ノード | 理由 |
|---|---|---|
| 0s | ZED2i | 基盤となるセンサー、最優先起動 |
| 2s | ZUPT Filter | ZED2iオドメトリが安定してから起動 |
| 4s | nvblox | ZED2iポーズ・深度画像が供給されてから起動 |
| 5s | Goal Selector | ZED2i Body Trackingが有効になってから起動 |
| 6s | RViz2 | すべてのトピックが出揃ってから可視化 |
| 8s | Nav2 | マップ(/map)が配信されてから起動 |
まとめ
本システムは、nvbloxをSLAMとして使用し、ZED2i Visual Odometryで自己位置推定を行うという独自の設計により、高精度かつリアルタイムな自律ナビゲーションを実現しています。
設計の核心ポイント
-
ZED2i
map_frame: 'odom'設定- ZED2iは
odom → zed_camera_originのTFを配信 - 高周波数(60Hz)の滑らかなオドメトリ
- ZED2iは
-
nvblox
global_frame: 'map'設定- nvbloxは
mapフレーム基準でOccupancy Gridを生成 - TF配信はせず、純粋にマッピングに専念
- nvbloxは
-
Nav2の活用
-
mapフレームでゴール指定 -
odomフレームで経路追従 - AMCLは未使用(ZED2i Visual Odometryで十分)
-
この設計により、計算コストを抑えつつ高精度なナビゲーションを実現しています。