ROS2でJoyスティックコントローラを使いたい

やりたいことはこの動画の感じ。
ROS2 のべんきょう
— moriitkys (@moriitkys) June 10, 2023
Joy Stick Controller で Turtlesim pic.twitter.com/6roLVNu9gn
Joy Stickを使う場合は以下実行するだけでOK。
$ ros2 run joy joy_node
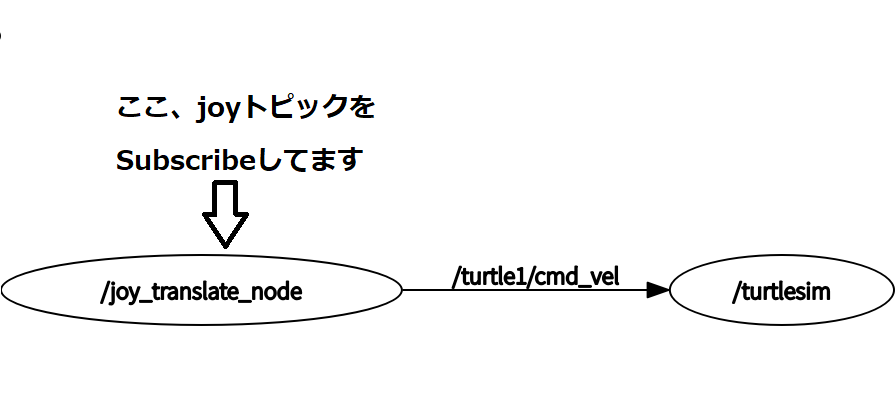
しかしjoyトピックなので亀を動かすためにはTwistに変換する必要がある。
自分でパッケージを作ってみる。

JoyからTwistへの変換のためのPythonコード
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
from geometry_msgs.msg import Twist
from sensor_msgs.msg import Joy
class JoyTranslate(Node):
def __init__(self):
super().__init__('joy_translate_node')
self.publisher = self.create_publisher(Twist,'cmd_vel', 10)
self.subscription = self.create_subscription(Joy,'joy', self.listener_callback, 10)
self.vel = Twist()
def listener_callback(self, Joy):
self.vel.linear.x = 2*Joy.axes[1]
self.vel.angular.z = 2*Joy.axes[3]
self.publisher.publish(self.vel)
self.get_logger().info("Velocity: Linear=%f" % (Joy.axes[1]))
def main(args=None):
rclpy.init(args=args)
joy_translate = JoyTranslate()
rclpy.spin(joy_translate)
rclpy.shutdown()
if __name__ == '__main__':
main()
パッケージ作成
$ cd ~/ros2_ws/src
$ ros2 pkg create --build-type ament_python --node-name joy_translate_node joy_translate
$ cd ~/ros2ws/src/joy_translate/joy_translate
ここでjoy_translate_node.pyを編集する。「JoyからTwistへの変換のためのPythonコード」で示したコードをコピペでOKのはず。
実行
$ ros2 run turtlesim turtlesim_node
$ ros2 run joy_translate joy_translate_node --remap cmd_vel:=turtle1/cmd_vel
$ ros2 run turtlesim turtlesim_node
参考
自分用のメモ
自分用メモ
トピックを見る場合
ros2 topic echo /joy
rosmsg show sensor_msgs/Joy
std_msgs/Header header
uint32 seq
time stamp
string frame_id
float32[] axes
int32[] buttons
geometry_msgs/Twist Message
geometry_msgs/Vector3 linear
geometry_msgs/Vector3 angular
bashrcに書くやつ
source /opt/ros/humble/setup.bash
ビルド後に必要なやつ
. install/setup.bash