目的
webotsが使えるようになる!
参考サイト
車体を作る
今回は差動二輪を作っていく(従動輪はなし)
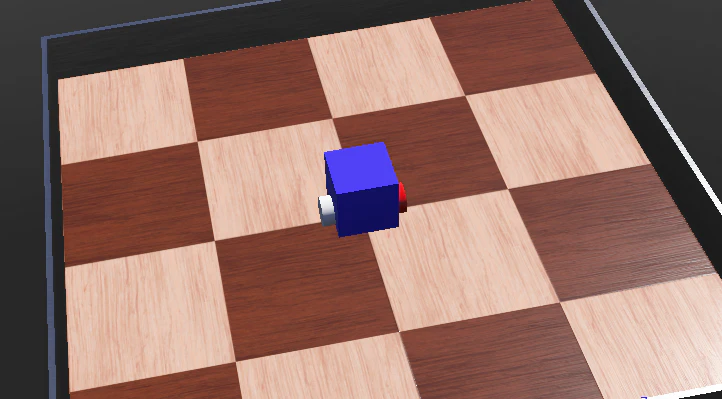
完成するとこんな感じになります
手順1
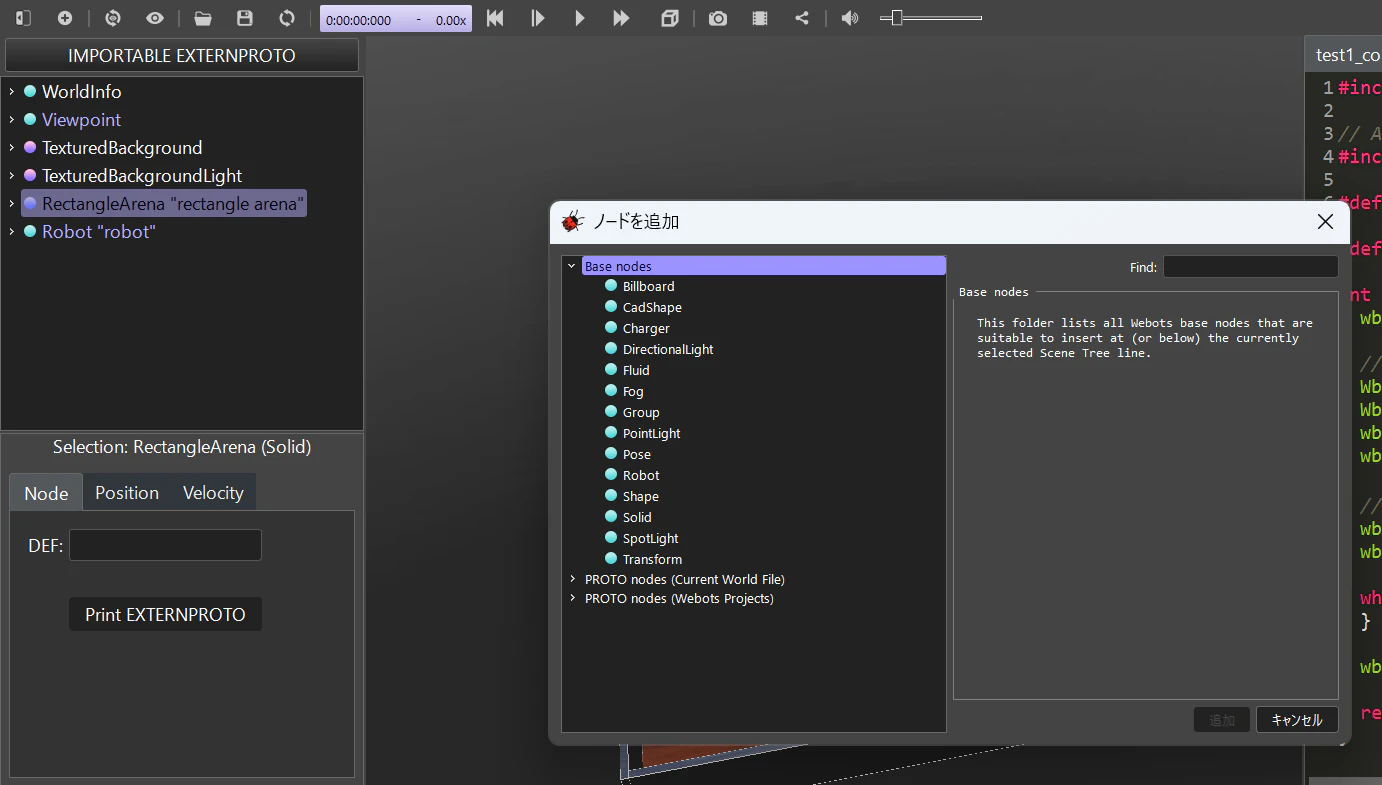
RectangleArena → + → Basenodes → Robot → 追加
手順2
translationを0 0 0.06に設定
children → + → Basenodes → Shape → 追加
children → + → Basenodes → HingeJoint → 追加
children → + → Basenodes → HingeJoint → 追加
手順3
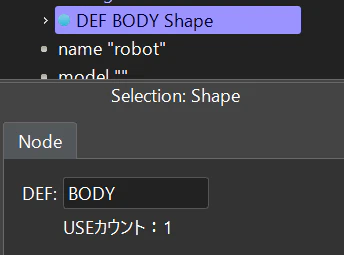
Shapeを選択してDEFのとこにBODYと打ち込む(BODYの部分はわかりやすければ何でもいい)
手順4
USE BODYはboundingobjectを選択して+押してUSE押してBODYってやつがあると思います(設定の使いまわしてきなもの)
手順5
めっちゃ作るの大変だった...
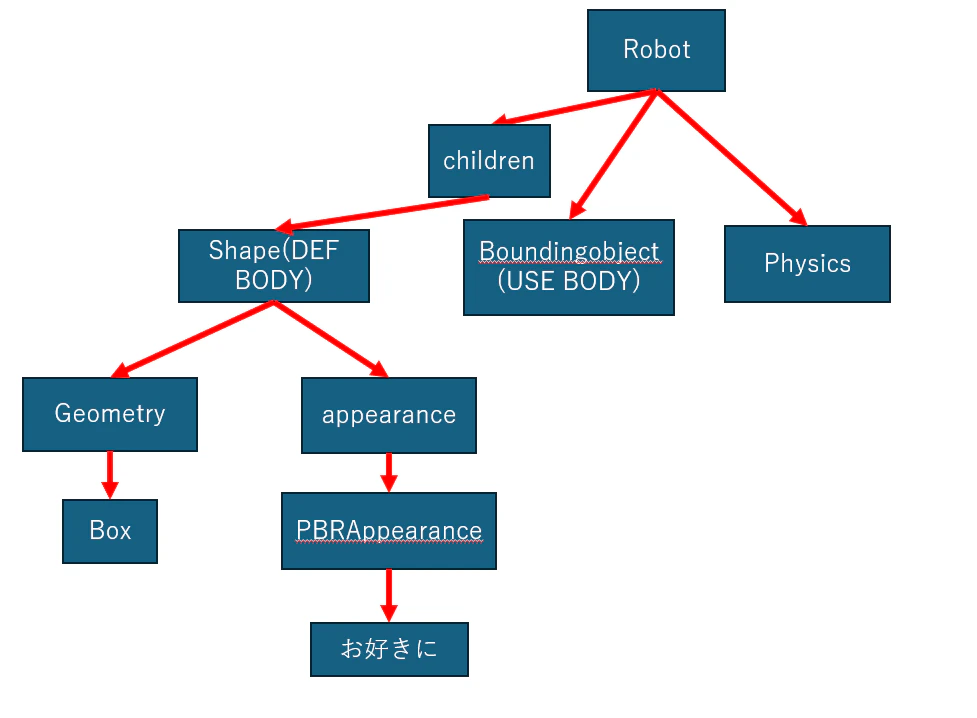
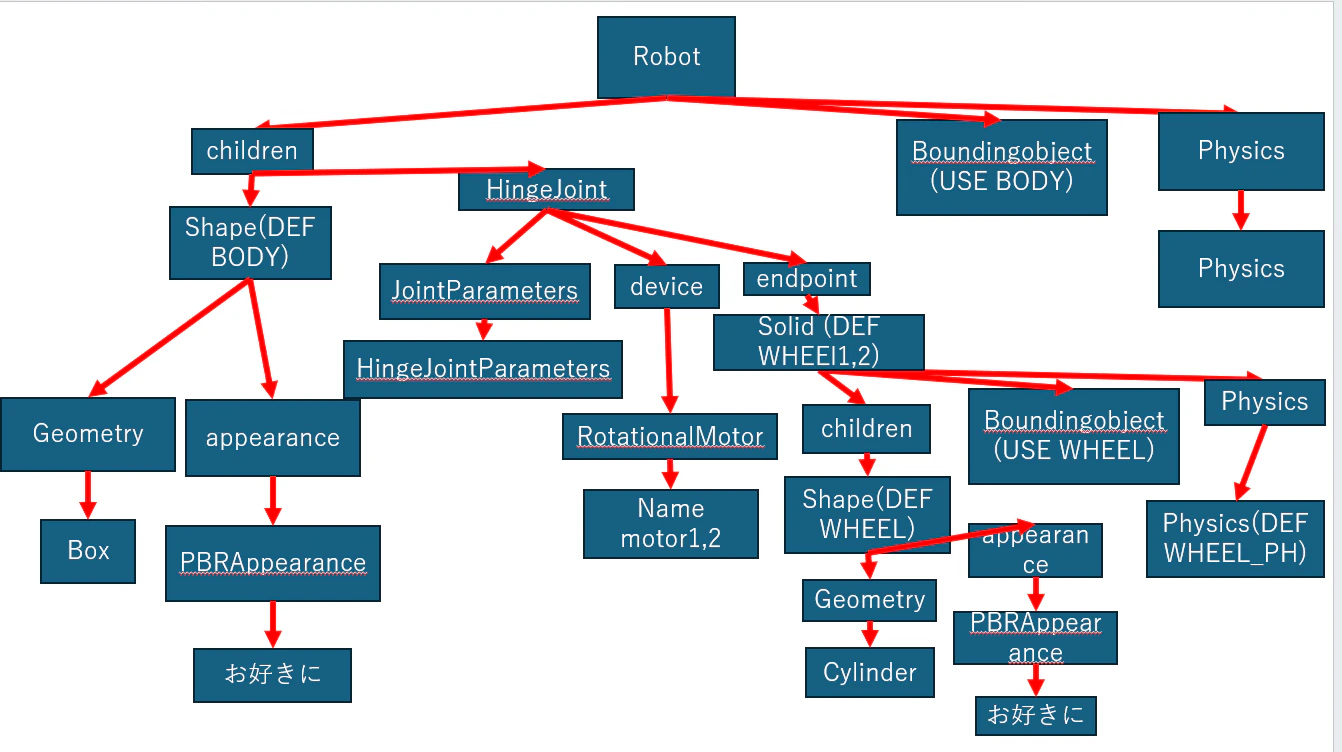
それぞれの中身
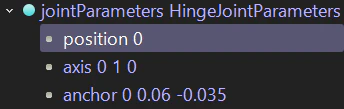

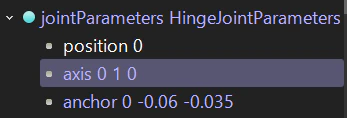
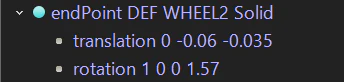
こんな感じに設定する
手順6
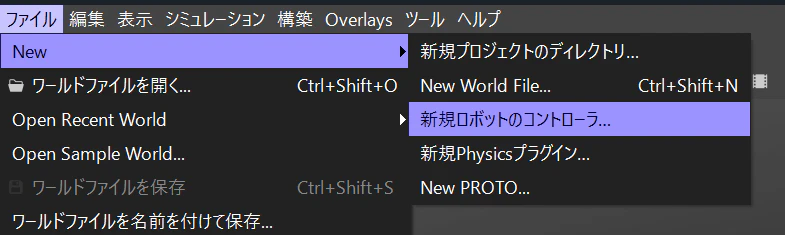
新しいコントローラー作ります
言語はC言語にしました
c.con
#include <webots/robot.h>
// Added a new include file
#include <webots/motor.h>
#define TIME_STEP 64
#define MAX_SPEED 6.28
int main(int argc, char **argv) {
wb_robot_init();
// get a handler to the motors and set target position to infinity (speed control)
WbDeviceTag left_motor = wb_robot_get_device("motor1");
WbDeviceTag right_motor = wb_robot_get_device("motor2");自分で決めたモーターの名前を入れる
wb_motor_set_position(left_motor, INFINITY);
wb_motor_set_position(right_motor, INFINITY);
// set up the motor speeds at 10% of the MAX_SPEED. スピード指定
wb_motor_set_velocity(left_motor, 0.6 * MAX_SPEED);
wb_motor_set_velocity(right_motor, 1.0 * MAX_SPEED);
while (wb_robot_step(TIME_STEP) != -1) {
}
wb_robot_cleanup();
return 0;
}
コピペ
手順7
上手くいったらなんか出てくるからresetを押して終わり!
手順8
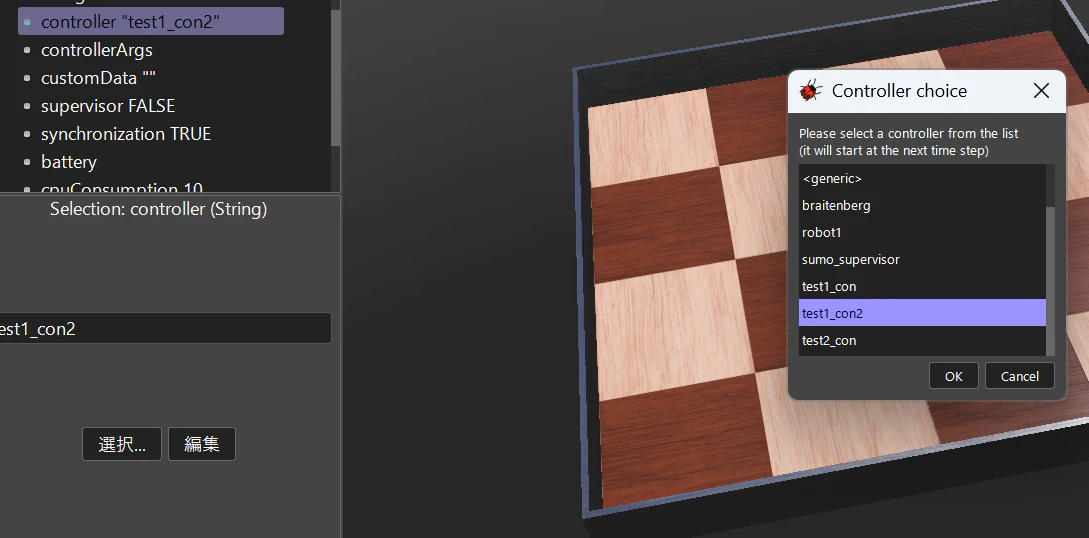
Robot → controllerで自分がさっき作ったやつを選択
動かす

ここで保存したりシミュレーションを開始させたりできます
おわり
思ってたよりだいぶ雑になった気がするけどだれかの役に立ちますように主に未来の私
今後はWebotsを活用して強化学習に手を出していきたいと思います