Voxel-FPN: multi-scale voxel feature aggregation in 3D object detection from point clouds
PointPillarの最初の特徴量抽出をVFEを使い、さらにマルチVoxelにupdateしたモデル。
Voxelと書いてあるがPillarでPointCloudを区切っているのではないかと思う(詳細が書いてなかったから推測)
アルゴリズム
voxel feature extraction
voxelizeした点をVoxelNetで提案されたVFEを使ってVoxel毎の特徴を取り出す。
Voxelizationは3種類の解像度で行う。
Multi-scale feature aggregation
 Voxel毎の特徴から、ご近所さんの特徴を得る為に、conv2dをstride2とstride1をしているだけ。 *conv2dがここで使われているからVoxelizationはPillarを使っているのではないかと推測RPN-FPN
Resion Proposal NetworkにFPN(Feature Pyramid Network)を使っている。結果
 ほとんど精度変わらないですね〜 voxelを複数の解像度でやってもあんま意味ないって事が証明されたってことかな?! 速度も結構遅くなってるんで、PointPillarの方が実用性あって好き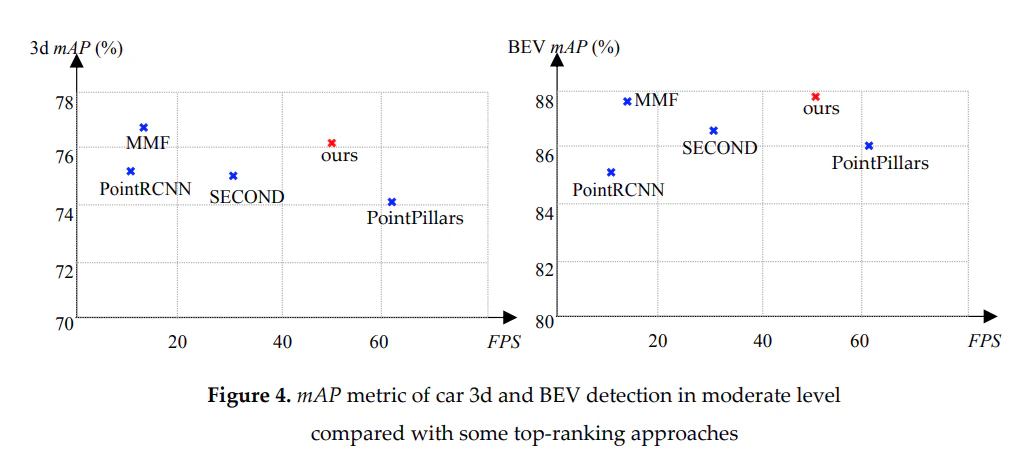
PointPillarより精度が良いと言いたいらしい。
よく見るとPointPillarに勝っているmoderateで比較してる。。。