
はじめに:産業史が動く、その分岐点に私たちは立っている
2026年初頭、日本は産業史における極めて重要な分岐点に立っています。急速な少子高齢化に伴う労働人口の減少、通称「2026年の崖」とも呼ばれる物流・建設業界の残業規制強化による人手不足の深刻化、そして生成AI技術の実空間への適用拡大。この三つの潮流が交錯するなか、日本の産業界と政府は「フィジカルAI(Physical AI)」を、国家生存のための核心的技術と位置づけました。
本記事では、2026年時点における日本のフィジカルAIへの取り組みの現状を、読み物としてわかりやすく紐解いていきます。経済産業省による予算の劇的な増額、ソブリンAIを支える計算基盤、そして「匠」の技をAIに継承する試みまで、第1部では戦略的背景と技術革新の前半をお伝えします。(第2部ではエッジAI・組織変革・産業連携・リスクと結論を扱います。)
なぜ今、フィジカルAIなのか——三つの潮流が重なった2026年
フィジカルAIとは、AIをソフトウェアの世界に閉じず、物理的な機械やロボットの制御に応用する領域のことです。工場のライン、倉庫、建設現場、医療や介護の現場といった「実空間」で、AIが判断し、動き、人を支える。日本がこの領域に国家として本気で投資する背景には、三つの現実があります。
第一に、労働力の減少です。2040年には、AI・ロボティクス分野だけで約339万人の人材不足が見込まれており、特に専門技術者や現場作業員の不足が深刻です。第二に、2024年から始まったトラックドライバーの時間外労働規制強化の影響が、物流のみならず建設、医療、サービス業へと波及し、構造的な人手不足が顕在化していることです。建設・物流では人手不足による倒産が過去最多となり、「現場崩壊」が現実のものとなっています(もう限界…建設・物流で「人手不足倒産」過去最多、2026年も続く「現場崩壊」の正体)。第三に、生成AI技術がテキストや画像の世界から、ロボットの動作や制御といった物理世界へと適用範囲を広げつつあることです。
この三つが重なった結果、企業にとっての自動化投資は「コスト削減」の手段から「事業継続」のための必須条件へと変わりました。とりわけ、従来の産業用ロボットでは対応できない非定型業務の自動化が、サービス業や医療現場で急務となっています。フィジカルAIは、その答えの一つとして、国を挙げて推し進められているのです。
戦略的背景:巨額のベース資金と「ソブリンAI」という選択
経済産業省の予算が語る、危機感と決意
2026年度、日本の産業政策はかつてない規模での財政的コミットメントを見せています。経済産業省の予算概算要求において、産業政策支出全体が前年度比約50%増の約3.07兆円へと急拡大しました。特筆すべきは、半導体と人工知能(AI)分野への配分が約1.23兆円と、以前の水準の約4倍に達している点です(令和8年度経済産業省関連予算案等の概要、AI・半導体産業基盤強化フレーム)。
この予算増額の背景には、従来の一過性の補正予算に依存した技術投資から、予見可能性の高い「ベース資金」への転換を図るという意図があります。AIやロボティクス開発は長期的な研究開発と設備投資を必要とするため、単年度ごとの予算措置では欧米や中国の巨額投資に対抗できない。その認識が浸透した結果です。具体的には、次世代半導体の国内製造を目指すRapidus(ラピダス)への支援に加え、国内AI開発(基盤モデル、データインフラ、フィジカルAIアプリケーションを含む)に3,873億円が充てられています。ここで「フィジカルAI」が明示的に予算項目として挙げられていることは重要で、ソフトウェア上のAI開発だけでなく、それを物理的な機械やロボットの制御に応用する領域こそが日本の勝ち筋であるという戦略的合意が、政府レベルでなされていることを示しています。
ソブリンAIとGENIAC——「自国内で完結する」能力を目指して

2026年における日本のAI戦略の中核をなすのが「ソブリンAI(Sovereign AI)」の概念です。AIの開発・運用に必要な計算資源、データ、基盤モデルを他国に過度に依存せず、自国内で完結できる能力を保持する。地政学的なリスクが高まるなか、AI技術を経済安全保障の観点から捉え直す動きが加速しています。
この戦略を具現化するのが、経済産業省とNEDOが推進する「GENIAC(Generative AI Accelerator Challenge)」プロジェクトです。GENIACは、基盤モデルの開発に必要な膨大な計算リソースを国内企業に提供し、開発者間の連携を促進することを目的としています(GENIAC / Ministry of Economy, Trade and Industry (METI))。2026年時点で、GENIACの支援を受けた楽天グループやソフトバンクなどの企業が、日本語能力に特化した高性能な基盤モデルを次々とリリースしています。楽天の「Rakuten AI 3.0」は、GENIACの計算資源を活用して開発され、日本語のニュアンスや文化的背景を深く理解するモデルとして、同社の広範なエコシステム内でコスト削減とサービス向上に寄与しています(Rakuten Unveils Japan's Largest High-Performance AI Model, Developed as Part of the GENIAC Project)。
さらに、産業技術総合研究所が運用する「ABCI 3.0(AI Bridging Cloud Infrastructure)」は、2025年1月より一般提供を開始しており、NVIDIA H200 GPUとQuantum-2 InfiniBandネットワークを統合した世界最高レベルのAIスーパーコンピュータとして、日本のソブリンAI開発の物理的基盤を支えています(「ABCI 3.0」に関するお知らせ、NVIDIA、最先端の ABCI 3.0 で日本のソブリン AI への取り組みを加速)。民間企業だけでなく、学術機関やスタートアップも最先端の計算資源にアクセス可能となり、「全日本」体制でのAI開発力が底上げされているのです。
技術革新(1):ロボットは「プログラミング」から「学習」へ——VLAモデルの台頭
従来型ロボットの限界と、フィジカルAIの答え
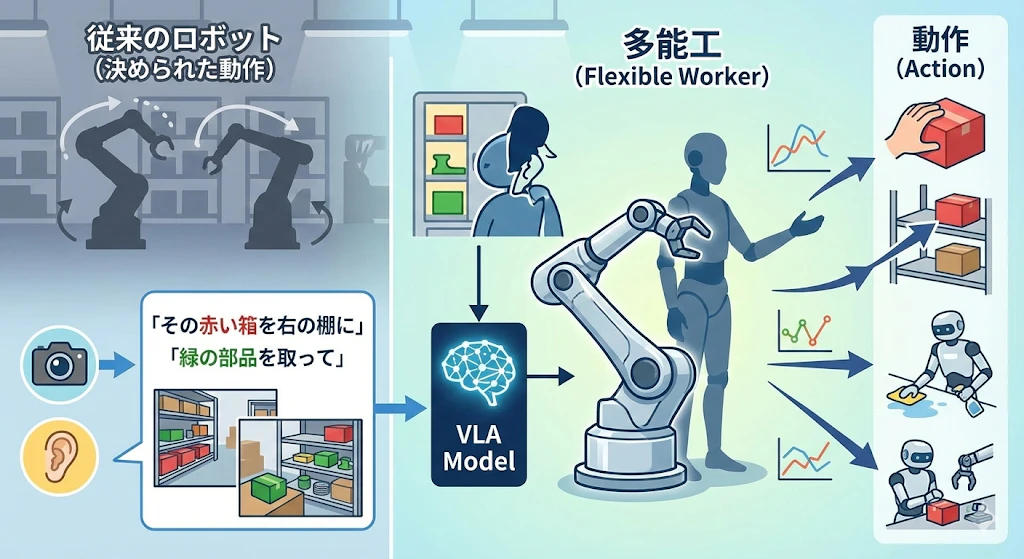
2026年における技術的な最大の転換点は、ロボット制御における「プログラミング」から「学習」への移行です。従来の産業用ロボットは、エンジニアがティーチングペンダントを用いて厳密な座標と動作シーケンスをプログラムする必要がありました。しかし、対象物の位置が数ミリずれたり、光の加減が変わったりするだけでタスクが失敗するため、変化の激しい実環境(物流倉庫や家庭など)への適用は困難でした。
これに対し、フィジカルAIの中核技術として台頭しているのが「VLA(Vision-Language-Action)」モデルです。VLAモデルは、視覚情報(Vision)と言語指示(Language)を入力として受け取り、ロボットの動作コマンド(Action)を直接出力する基盤モデルです。大規模言語モデルがテキストを理解するように、VLAモデルは物理世界を理解し、「その赤い箱を右の棚に置いて」といった抽象的な指示を、具体的な関節角度や把持力の制御信号へと変換します。この実装により、ロボットは単一作業しかできない「専用機」から、状況に応じて多様なタスクをこなす「多能工」へと進化しつつあります。
ソフトバンクと安川電機が共同開発した「MOTOMAN NEXT」は、このVLAモデルを産業用ロボットに実装した先駆的な事例です。周囲の環境認識とAIによる判断能力を備えており、従来のように厳密なティーチングを必要としません。不定形な物体が流れてくるラインでも、視覚情報から把持位置を自律的に判断し、適切な動作を生成することができます。多品種少量生産を行う中小製造業や、商品の入れ替わりが激しい物流現場へのロボット導入障壁が、劇的に低下しています。VLAの研究は、単なる動作生成にとどまらず、空間推論や長期的なタスク計画能力の獲得へと進んでおり、2D画像だけでなくビデオストリームから3Dシーンの幾何学情報を推論するマルチモーダルモデルの開発も進められています。
シミュレーションとデジタルツイン——FanucとNVIDIAの協業が開く道
フィジカルAIの開発において最大のボトルネックとなるのが、学習データの不足です。物理世界でロボットを何万回も動かして学習させるのは、時間とコスト、そして安全性の観点から現実的ではありません。この課題を解決するのが、高精細なシミュレーション技術(Sim-to-Real)です。
ファナック(Fanuc)は、NVIDIAとの協業を深め、同社のロボット製品群をNVIDIAのシミュレーションプラットフォーム「Omniverse」および「Isaac Sim」に対応させました。開発者はフォトリアルな仮想工場内でファナックのロボットを配置し、AIモデルの学習やテストを行うことが可能になっています。仮想空間上で摩擦や重力などの物理法則を再現し、ロボットの動作をシミュレーションすることで、実機を使うことなく膨大な学習データを生成できます。ラインのレイアウト変更や新しいAIアルゴリズムの導入を、実際に工場を止めることなく仮想空間で検証できるため、導入コストとリスクを大幅に削減できるのです。OpenUSD(Universal Scene Description)ベースのデジタルツインに対応することで、異なるメーカーの機器やロボットを同一のシミュレーション環境で統合的に扱えるようになり、工場全体の最適化が容易になっています。
日本発の革新——Sakana AIと「進化的モデルマージ」
米国のビッグテックがデータセンター規模の巨大モデル開発に注力する一方で、日本国内では、より効率的で自律的なAIモデルの開発アプローチが注目されています。その代表格が、東京を拠点とする「Sakana AI」です。
Sakana AIは、「進化的モデルマージ(Evolutionary Model Merge)」といった独自のアプローチを提唱しています(進化的アルゴリズムによる基盤モデルの構築)。これは、生物の進化のメカニズムをAI開発に応用するもので、既存の異なる能力を持つ複数のモデルを自動的に組み合わせ、世代交代を繰り返すことで、特定のタスクに最適化されたより高性能なモデルを自律的に生成する技術です。ゼロから巨大モデルを学習させるのではなく、既存のモデル資産を有効活用して新たな能力を生み出すため、計算資源の消費を抑えつつ高い性能を実現できます。エネルギー資源の乏しい日本にとって、極めて親和性の高いアプローチとして、学術誌『Nature Machine Intelligence』にも採択されるなど、国際的にも評価されています(多様なAIモデルを進化的にマージする:Sakana AI)。
技術革新(2):「匠」の技をAIへ——暗黙知のデータ化
技能継承の危機と、デジタル化の必然性
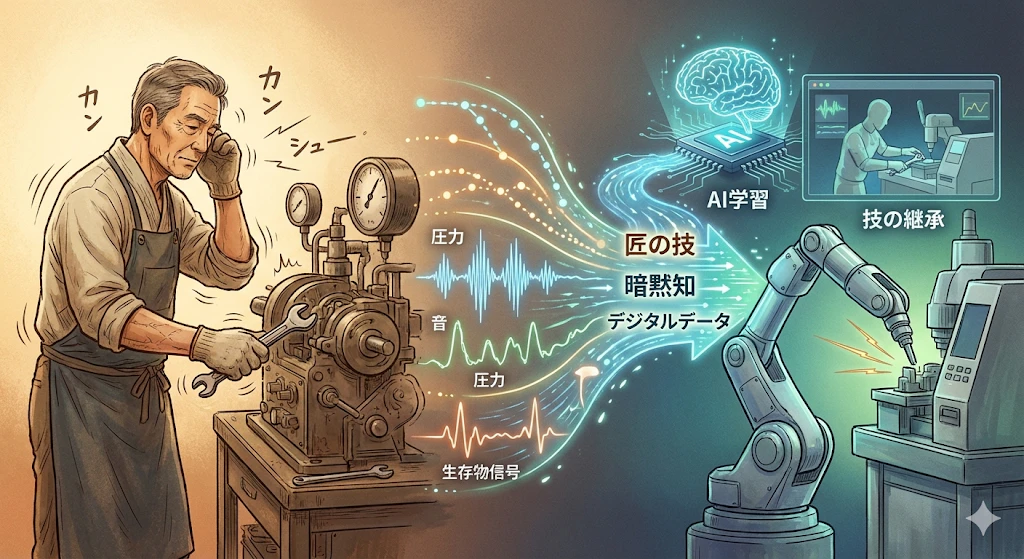
日本の製造業の強さは、長年「匠」と呼ばれる熟練技能者の高度な技術と、現場における「暗黙知」に支えられてきました。しかし、団塊世代の引退と若年入職者の減少により、この暗黙知が形式知化されないまま失われる危機に直面しています。言葉で説明するのが難しい「カン・コツ」、機械の微妙な音の違いによる異常検知、素材の状態に合わせた瞬時の調整といった技能を、いかにしてデジタルデータとして保存し、AIに学習させるかが、2026年の日本産業界の最重要課題となっています。
暗黙知のデータ化において鍵となるのは、従来の数値データ(ログデータ)だけでなく、映像、音声、力覚(ハプティクス)などの「マルチモーダルデータ」の活用です。熟練者が作業を行う際の視線、手先の動き、力の入れ具合などを複合的にセンシングし、AIで解析することで、熟練者の「意図」や「判断プロセス」を可視化する試みが進んでいます。
スズキ「Ollo Factory」——技能の標準化が変える現場
スズキ株式会社は、AIスタートアップのOllo株式会社と連携し、製造現場における技能継承システム「Ollo Factory」を国内工場に導入しました。スマートフォンのカメラ等で撮影した作業映像をAIが解析し、熟練者と新人作業者の動作の違いを可視化するものです。骨格推定技術を用いて作業者の姿勢や手の動きをトラッキングし、熟練者の標準動作と新人の動作を比較することで、無駄な動きや作業手順の逸脱を瞬時に特定します。分析結果はわずか数分でフィードバックされ、指導員が感覚的に教えていた内容を、客観的なデータに基づいて指導できるようになり、技能習得にかかる時間を大幅に短縮しています。国内工場を「マザー工場」と位置づけ、そこで形式知化された技能データを海外拠点に展開するハブとしての機能を強化している点も、日本企業ならではの戦略です。
ダイキン・日立の異常診断AIと、オムロンのセンサーベース技能転写
ダイキン工業と日立製作所は、化学プラントや空調機器の保守業務における熟練技能のデジタル化で協業しています。特に「設備異常診断AIエージェント」の開発においては、熟練エンジニアが設備の音や振動から異常を察知するノウハウをAIに学習させています。単に異常を検知するだけでなく、熟練者が「なぜその判断を下したのか」という論理プロセスをAIモデルに組み込むことで、90%以上の精度で故障原因の特定と対策の提案が可能となり、このAIエージェントを国内外の拠点に展開することで、熟練者が不在の拠点でも高品質な保守サービスを提供できる体制を構築しています。
オムロンは、制御機器メーカーとしての強みを活かし、センサーデータを通じた技能のデジタル化を推進しています。同社のコントローラーは、機械の動作データをマイクロ秒単位で収集し、熟練工が行う微細な調整を再現する制御アルゴリズムを生成する機能を有しています。熟練者の操作ログを学習データとして、AIが最適な制御パラメータを自動生成する「スキル転写」により、熟練者不足による生産性の低下や品質のばらつきを防ぎ、設備の稼働データから異常の予兆を捉える予兆保全ソリューションも展開しており、これも熟練保全員の「気づき」をシステム化したものと言えます。
第2部では、エッジAIと小規模言語モデル(SLM)の戦略的優位性、パナソニックのPXやソフトバンクのIzanagiプロジェクトに代表される組織変革、ウラノス・エコシステムを軸にした産業連携、サービスロボットの社会実装、そしてリスク要因と結論をまとめます。続きは「第2部」でお届けします。
作成日:2026年1月30日