Fast and Exact Root Parity for Continuous Collision Detection (2022)
タイトル: 連続衝突検出のための高速かつ厳密な根の偶奇性判定
著者: Bolun Wang, Zachary Ferguson, Xin Jiang, Marco Attene, Daniele Panozzo, Teseo Schneider
発行: EUROGRAPHICS 2022 / Volume 41 (2022), Number 2
-------------------------------------------------------------------------------------------------------------------
はじめに
課題: 連続衝突検出 (CCD) における浮動小数点誤差の問題
- 動く物体が互いに貫通しないようにするための基盤技術
- CCDは低次3次多項式の根の探索に帰着するが、浮動小数点計算の誤差が問題
- 誤差は偽陽性(衝突なしを誤検出)や偽陰性(衝突ありを見逃す)を引き起こし、シミュレーションの不安定化を招く
- 先行研究[BEB12]は根の偶奇性に着目したが、退化ケースの処理や数値計算の複雑さに課題を残した
提案手法: Fast and Exact Root Parity for Continuous Collision Detection
CCDクエリの根の偶奇性を幾何学的に判定する革新的なアプローチ
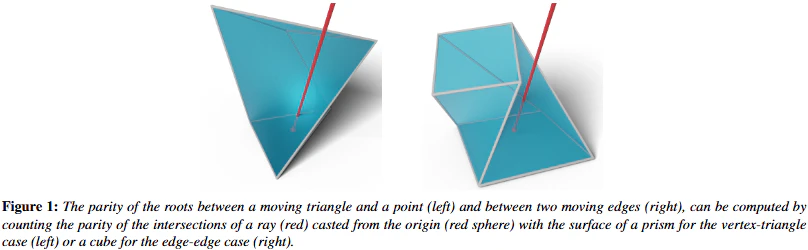
- 根の偶奇性 = プリズム/ヘキサヘドロンの表面と原点からのレイの交差の偶奇性
主な貢献:
1. 数値シフト法による正確な浮動小数点計算
- 入力座標をわずかに丸めることで(平均 \(10^{-15}\) 程度の誤差)、浮動小数点数を用いた正確な計算を実現
- これにより、先行研究の複雑な多倍長演算を不要とし、計算コストを大幅に削減 (Sterbenzの定理に基づく)
2. 全ての退化ケースのロバストな処理
- ビリニア面が線や点に退化するような特殊な幾何学的構成を体系的に識別し、正確に処理
- 先行研究[BEB12]で報告されたロバスト性の課題を克服し、シミュレーション中のトンネリング失敗を回避
3. 効率性と実用性
- 最も効率的な近似手法と匹敵する実行速度を実現
- 偽陽性を一切発生させない厳密な判定(偽陰性は6000万クエリ中7件と極めて稀なケースに限定)
結果と評価
大規模ベンチマーク [WFS*21] での厳密な検証
- 既存の「不正確な」CCD手法と比較して、計算速度は同等でありながら、偽陽性ゼロを達成
- この正確性は、物理シミュレーションの信頼性と安定性を大幅に向上させる
- 既存シミュレーターへの統合も容易(入力座標のわずかな丸め処理のみで対応可能)
結論と今後の展望
高精度算術を用いずに、高速かつ厳密なCCDの偶奇性判定を実現
限界:
- 衝突発生時刻を効率的に計算する機能は今後の研究課題
- 根がゼロの場合と2つの場合を区別することはできない(これは極めて稀なケースである)
物理シミュレーションやインタラクティブグラフィックスにおける、よりロバストで信頼性の高い衝突検出に貢献
オープンソースでのリファレンス実装を公開し、技術の広範な普及を促進
-------------------------------------------------------------------------------------------------------------------
3行要約
- 本研究では、Continuous Collision Detection (CCD) における cubic polynomial の根の parity を正確に計算する初めてのアルゴリズムを提案します。
- このアルゴリズムは、数値的な shifting method を用いて floating-point 数で exact なポリゴン構築を可能にし、全ての degenerate cases をロバストに処理することで、従来の課題を克服しています。
- 提案手法は、既存の高速な approximate algorithms に匹敵する実行時間で、false positives を発生させない exact な結果を提供し、既存のシミュレーターに容易に統合可能です。
Q:何が問題で、それをどのように解決したのか、わかりやすく説明してください
A:
この論文は、シミュレーションにおける物体の貫通(トンネリング)を防ぐために不可欠な**連続衝突検出(Continuous Collision Detection, CCD)**が抱える、長年の課題とそれに対する解決策を提示しています。
問題点:
従来のCCDアルゴリズムは、多くの場合、低次(主に3次)多項式の根を見つけることで衝突を検出します。しかし、コンピュータ上での浮動小数点演算は丸め誤差を伴うため、これらの多項式の根を正確に計算することが非常に困難でした。この不正確さが以下の問題を引き起こします。
- 偽陽性(False Positives): 実際には衝突がないのに、アルゴリズムが誤って衝突ありと報告してしまうこと。これにより、シミュレーションが不必要に停止したり、オブジェクトが不自然に離れたりする可能性があります。
- 偽陰性(False Negatives): 実際には衝突があるのに、アルゴリズムが衝突を見落としてしまうこと。これは、オブジェクトが互いに貫通してしまう「トンネリング」現象を引き起こし、シミュレーションの物理的整合性を破壊します。
特に、先行研究である[BEB12]は、衝突検出の根の数を直接計算するのではなく、その**偶奇性(parity)**を幾何学的な問題に変換して解決しようとしました。これは、CCDクエリから生成されるビリニア面を持つ多面体(プリズムやヘキサヘドロン)と、原点から発射されるレイの交差数の偶奇性を数えるという画期的なアプローチでした。しかし、この方法も以下の課題を抱えていました。
- 正確な計算の困難さ: 多面体の頂点の座標計算や、ビリニア面とレイの交差判定において、浮動小数点誤差を避けるために複雑な高精度算術や代数計算(有理数演算など)が必要とされ、これが非常に計算コストを増大させていました。
- 退化ケース(Degenerate Cases)への非対応: ビリニア面が平面に潰れたり、点や線に退化したりする特殊な幾何学的配置(退化ケース)に対して、ロバストな処理ができていませんでした。これにより、アルゴリズムが失敗したり、不正確な結果を返したりすることがありました。
- ゼロ根と2つの根の区別不能: 根の偶奇性しか判別できないため、衝突がない(ゼロ根)場合と、まれではあるものの、2回の衝突が発生する(2つの根)場合を区別できません。後者の場合、偽陰性として扱われる可能性があります。
解決策:
本論文の著者たちは、[BEB12]の幾何学的アプローチを基盤としつつ、以下の革新的な手法を導入することで、上記の問題を克服し、高速かつ厳密な根の偶奇性カウンターを実現しました。
-
数値シフト法(Reduced Precision)による正確な多面体構築:
- 従来は高精度算術が必要だった多面体(プリズムやヘキサヘドロン)の頂点計算において、著者たちは**入力シーンの頂点座標を事前にわずかに丸める(精度を落とす)**という手法を提案しています。
- これは、IEEE 754浮動小数点標準におけるSterbenzの定理を利用することで可能になります。Sterbenzの定理は、特定の条件を満たす2つの浮動小数点数の差は、浮動小数点数として正確に表現できることを示しています。
- この定理の条件が満たされない場合でも、シーン全体をグローバルなオフセット
eでシフトすることで、頂点間の差分計算が常に正確になるようにします。このeはシミュレーション全体で固定されるため、時間ステップ間で不整合が生じることもありません。 - この「正確に丸められた」入力を使用することで、多面体の頂点座標が浮動小数点数で厳密に表現され、以降の計算で高精度算術を用いる必要がなくなります。この丸め誤差は非常に小さく(平均(10^{-15})のオーダー)、シミュレーション精度にほとんど影響を与えません。
-
退化ケースの包括的な処理:
- ビリニア面が平面、線、または点に退化する可能性のあるすべてのケースを詳細に列挙し、それらをロバストに処理するメカニズムを実装しました。
- これは、面の4つの頂点によって形成される四面体の体積の符号((\text{orient3d})述語を使用)を比較することで、退化タイプを正確に識別します。
- 退化面とのレイ交差判定では、単純なXOR論理を用いて偶奇性を決定します。例えば、凹型("butterfly")のビリニア面の場合、レイが2つの仮想的な三角形のうち片方のみと交差するかどうかで判定します。
-
効率的なレイ・ビリニア面交差判定:
- 上記の2つの解決策により、多面体の頂点が浮動小数点数で正確に表現されるため、標準的な(高速な)浮動小数点ベースの幾何学的述語(例:(\text{ray-triangle})交差判定)を信頼性高く使用できるようになりました。これにより、複雑な数値計算を回避し、既存の近似アルゴリズムに匹敵する速度を達成しています。
- レイが多面体の境界線や頂点に偶然重なる「退化レイ」のケースでは、別のランダムな方向のレイを再キャストして処理をやり直すことで、堅牢性を確保しています。
結果として、この論文は以下の点を達成しました。
- 正確性: 偽陽性を一切発生させない「正確な」衝突検出を実現しました。
- 堅牢性: 退化ケースや数値的な不安定性に強く、様々な入力に対してロバストな動作を保証します。
- 高速性: 複雑な有理数演算などを必要とせず、効率的な浮動小数点演算を用いることで、従来の近似的なCCDアルゴリズムに匹敵する、実用的な速度を実現しました。
- 実用性: シミュレーションソルバーへの統合も比較的容易であり、既存のシステムに大きな変更を加えることなく導入できます。
ただし、ゼロ根と2つの根を区別できないという、根の偶奇性カウンター本来の限界は残っており、ごくまれに偽陰性が発生する可能性がある点も明記されています(ただし、シミュレーションデータセットでは6000万クエリ中7ケースと極めて稀でした)。
Q:関連手法との比較について詳しく説明してください
A:
本論文は、提案するCCDアルゴリズムの性能を評価するため、既存の様々な関連手法と比較を行っています。比較は、正確性(偽陽性・偽陰性の数)と実行時間という二つの主要な指標に基づいて、大規模なベンチマークデータセット(HandcraftedデータセットとSimulationデータセット)を用いて行われました。
比較の評価指標
論文では、以下の詳細な評価指標を用いて各手法の性能を比較しています。
-
T: 平均クエリ時間((\mu s)) -
TP: ポジティブクエリ(衝突ありと判定されたケース)の平均時間((\mu s)) -
TN: ネガティブクエリ(衝突なしと判定されたケース)の平均時間((\mu s)) -
FP: 偽陽性(False Positives)の数。実際には衝突がないのに、衝突ありと誤って報告された回数。 -
FN: 偽陰性(False Negatives)の数。実際には衝突があるのに、衝突を見落とした回数。
比較対象手法
論文で比較対象となっている主要な既存手法は以下の通りです。
- IRF (Interval Root-Finder) [Sny92]、UIRF (Univariate Interval Root-Finder) [Sny92, RKC02]、TI (Tight Inclusion) [WFS*21]: これらは区間演算に基づき、根を厳密に囲い込むことで偽陰性(トンネリング)を防ぐことを目指す手法です。保守的であるため偽陰性は発生しませんが、しばしば偽陽性を多く出す傾向があり、計算コストが高いのが特徴です。
- FPRF (Floating-Point Root Finder) [VHTG10]、MSRF (Minimum Separation Floating-point Root Finder) [HPSZ11]: これらは浮動小数点演算を用いて直接根を探索する手法です。高速ですが、数値誤差に弱く、偽陽性や偽陰性が発生しやすい欠点があります。
- TCCD (TightCCD) [WTTM15]: 厳密な誤差範囲を考慮することで、より堅牢なCCDを実現しようとする手法です。
- RP (Root Parity) [BEB12]: 本研究の基礎となった、根の偶奇性を数えるという画期的なアイデアを提案した手法です。しかし、オリジナル版は退化ケースの処理が不完全で、数値的な厳密性に課題がありました。
- RRP (Rational Root Parity) [BEB12, WFS*21]: RPのアイデアを有理数演算で実装し、厳密性と退化ケース処理を強化したバージョンです。非常に厳密ですが、有理数演算のオーバーヘッドにより計算が非常に遅いのが欠点です。
- BSC (Bernstein Sign Classification) [TTWM14]: Bernstein多項式の性質と符号分類を利用したCCD手法です。
本手法 (Ours) との比較結果の詳細
論文のTable 1にまとめられた結果は、本手法の顕著な優位性を示しています。
1. 正確性(偽陽性 FP と偽陰性 FN)
-
偽陽性
FP: 本手法はすべてのデータセット、すべてのクエリタイプでFPがゼロです。これは、RRPも同様ですが、他のほとんどの手法(IRF, UIRF, FPRF, TCCD, BSC, MSRF, TI)は程度の差こそあれ偽陽性を発生させています。偽陽性がないことは、シミュレーションの信頼性において極めて重要です。 -
偽陰性
FN:-
Simulation Dataset (大規模実データ): 本手法は
FNがゼロです。これはRPとRRPも同様です。他の手法はFNを出す可能性があります。 -
Handcrafted Dataset (特殊ケース含む): 本手法は
FNがVertex-Faceで5件、Edge-Edgeで8件発生しています。RPとRRPも同程度のFNがあります。これは、このデータセットが**多重根(二重根など)**を含むように意図的に作られた稀なケースであり、根の偶奇性カウンターではゼロ根と二重根を区別できないという、このアプローチの限界に起因します。しかし、論文中では実シミュレーションデータ(6000万クエリ)中でこのようなケースはわずか7件であったと述べられており、実用上は大きな問題ではないとされています。
-
Simulation Dataset (大規模実データ): 本手法は
結論として、本手法は偽陽性を完全に排除し、実用的な状況下で偽陰性もほぼ発生しない、極めて正確なアルゴリズムです。
2. 実行時間 (T, TP, TN)
-
全体的な速度 (
T):- 本手法は、平均クエリ時間において、TCCDに匹敵する速度(Handcrafted Vertex-Faceで1.07 $(\mu s)$ vs TCCDの0.40 $(\mu s)$、Simulation Vertex-Faceで0.31 $(\mu s)$ vs TCCDの0.29 $(\mu s)$など)を示しています。
- 特に、有理数演算を用いるRRP(Rational Root Parity)と比較すると、本手法は圧倒的に高速です(例えば、Handcrafted Vertex-Faceで1.07 $(\mu s)$ vs RRPの1042.59 $(\mu s))$。これは、本手法が浮動小数点演算を賢く利用することで、有理数演算のオーバーヘッドを回避していることの証です。
- IRF, UIRF, BSC, TIといった区間演算に基づく手法よりも大幅に高速です。
-
ランタイムの安定性 (
TPとTNの比較):- 本手法の
TPとTNの値は非常に近く、衝突の有無にかかわらず、ランタイムが安定していることを示しています。 - 対照的に、TI, IRF, BSCなどの一部の手法は、衝突ありのケース(
TP)で大幅にランタイムが増加する傾向があります(例:TIのSimulation Vertex-FaceでTPが63.70 $(\mu s)$に対し、TNが0.73 $(\mu s))$。これは、これらの手法が衝突検出時に追加の計算(例えば、区間を細かく分割する)を必要とするためです。
- 本手法の
結論として、本手法は正確性を犠牲にすることなく、既存の高速な近似的手法に匹敵する、実用的な速度を達成しています。
データセットの性質について
- Handcrafted Dataset: このデータセットは、アルゴリズムの極限性能を試すために、意図的に数値的に困難なケースや多重根のケースを含むように設計されています。このため、本手法やRP、RRPで偽陰性が発生する要因となりますが、これは現実のシミュレーションでは非常に稀なケースです。
- Simulation Dataset: これは大規模な実際のシミュレーションから抽出されたデータであり、より現実的な衝突シナリオを反映しています。このデータセットでは、本手法は完璧な正確性(FP, FNともにゼロ)を示しています。
まとめ
本論文で提案された「Fast and Exact Root Parity」手法は、既存の「根の偶奇性」アプローチのコンセプトを継承しつつ、以下の点で大きな進歩を遂げました。
- 入力の事前丸めという独創的なアプローチにより、高精度算術を用いることなく、浮動小数点数で正確な幾何学的構成を可能にしました。
- 退化ケースの網羅的な処理により、アルゴリズムの堅牢性を飛躍的に向上させました。
- これらの改善により、偽陽性をゼロに抑えつつ、近似的手法と同等の高速性、優れたランタイムの安定性を実現しました。
これにより、高速性と正確性という、これまでのCCDアルゴリズムが両立困難であった課題に、実用的な解を与えたと言えるでしょう。
Q:提案手法の限界と今後の課題はなんですか?
A:
本論文で提案されている「Fast and Exact Root Parity for Continuous Collision Detection」は、CCDの分野に大きな進歩をもたらしましたが、著者自身も認めているように、いくつかの限界と今後の研究課題が存在します。
提案手法の限界 (Limitations)
-
衝突時刻 (Time of Impact, ToI) の非効率的な計算:
- 問題点: 提案手法は、衝突の有無(より正確には根の偶奇性)を高速かつ正確に判定できますが、具体的な衝突が発生する「時刻」を直接的かつ効率的に計算する機能は持ちません。論文では、衝突が検出された場合に、その衝突発生時刻を絞り込むために「ナイーブな二分法 (naive bisection method)」を使用しています(Algorithm 2参照)。
- 影響: シミュレーションでは、単に衝突の有無だけでなく、いつ、どこで衝突が起こるかを正確に知ることが、適切な衝突応答(例えば、反発や摩擦力の計算)を適用するために不可欠です。二分法は、必要な精度に達するまでに多くのCCDクエリを繰り返す必要があり、これが全体のシミュレーション時間を増加させる可能性があります。
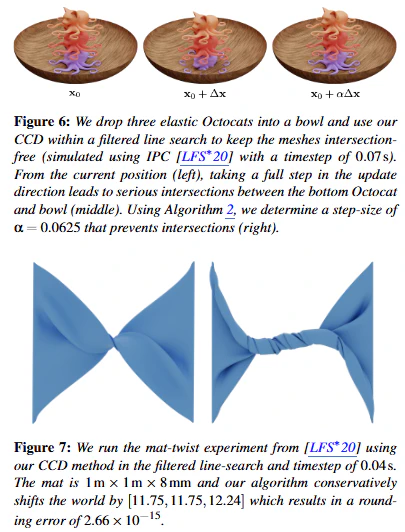
- 補足: 論文のFigure 6やFigure 7のシミュレーション例では、小さなタイムステップ(0.07sや0.04s)と、(\epsilon_t = 10^{-3})のような比較的緩やかな数値許容度で二分法を使用しているため、実用上問題は少ないとされていますが、より厳しい要件のシミュレーションや、多数のオブジェクトが関与する大規模なシーンではボトルネックになり得ます。
-
入力精度の削減要件 (Reduced Precision Input Requirement):
- 問題点: 提案手法は、その正確性を保証するために、入力シーンの頂点座標を**事前にわずかに丸める(精度を落とす)**必要があります。これは、浮動小数点演算における差分計算を厳密にするための重要なステップです。
- 影響: この要件は、既存のシミュレーションソルバーに本手法を統合する際に、「わずかながらもコード変更」が必要になることを意味します。シミュレータのコア部分でデータを処理する前に、この丸め処理を組み込む必要があります。論文では、この丸めによる精度損失は平均で(10^{-15})オーダーと非常に小さく、シミュレーションの精度やランタイムに知覚できる影響はないと述べられていますが、既存のワークフローを変更することは常に障壁となり得ます。
-
根の偶奇性しか検出できない (Parity of Roots Only):
- 問題点: 提案手法は、CCDクエリの3次多項式の根の数を直接数えるのではなく、その**偶奇性(奇数個か偶数個か)**しか判定できません。このため、ゼロ根(衝突なし)と2つの根(2回の衝突)を区別することができません。
- 影響: この限界は、偽陰性(False Negatives)を引き起こす可能性があります。具体的には、オブジェクトが衝突して一度通過し、再び衝突して元の位置に戻るような、非常に特殊な「二重根」のケースでは、根の数が偶数(2個)と判定され、「衝突なし」と誤って報告される可能性があります。論文のベンチマークでは、このようなケースは実データセットにおいて6000万クエリ中わずか7ケースと極めて稀であったとされていますが、一部のソルバー(例:IPC [LFS*20])では、わずかな偽陰性でもシミュレーションの破綻につながる可能性があるため、問題となり得ます。
今後の課題 (Future Work)
-
効率的なToI推定アルゴリズムの設計:
- 現在の二分法に代わる、より効率的な衝突時刻の計算方法が求められています。
- 論文では、F(Ω)の画像(衝突が発生する可能性のある領域)内で、原点に最も近い点から衝突時刻を推定するというアイデアが今後の重要な研究方向として挙げられています。このような幾何学的なアプローチは、より少ないクエリ回数で高精度なToIを特定できる可能性があります。
-
最小分離 (Minimum Separation) を考慮した正確なアルゴリズムの設計:
- 現在のアルゴリズムは、オブジェクトが「衝突したかどうか」の判定に特化しています。しかし、物理シミュレーションでは、オブジェクトがまだ衝突していない段階で「どれだけ接近しているか」、あるいは「最小分離距離はいくらか」を知ることが、衝突の予測や回避策を講じる上で非常に有用です。
- 将来的には、厳密な最小分離距離を計算できるような、より包括的なCCDアルゴリズムの開発が期待されます。これにより、衝突前のアクション計画や、より高度な接触処理が可能になるでしょう。
-
非線形軌道への拡張:
- 本論文のアルゴリズムは、オブジェクトの頂点が線形軌道(つまり、時間的に一定の速度で移動する)に沿って移動するという仮定に基づいています。これは多くの物理シミュレーションで一般的な仮定ですが、ロボティクスやアニメーションなど、より複雑なアプリケーションでは、オブジェクトが非線形な軌道(例えば、多項式軌道や任意のアニメーション曲線)に沿って移動する場合があります。
- この場合、CCDクエリはより高次の多項式となり、現在のビリニア面を用いた幾何学的解釈では対応できません。非線形軌道にも対応できるような、新しい幾何学的解釈や数値手法の開発が今後の重要な課題となります。
これらの限界と課題を乗り越えることで、本研究の成果はさらに幅広い応用分野でその価値を発揮し、より複雑でロバストなシミュレーションの実現に貢献するでしょう。