A Low-complexity Wavelet-based Visual Saliency Model to Predict Fixations (a Narayanaswamy, 2020)
Q:この論文の概要を教えてください
A:
この論文は、人間の視覚における注視点を予測するための、低複雑度のウェーブレットベースの視覚顕著性モデルを提案しています。 従来のモデルと比較して、輝度と彩度の2つのチャネルのみを使用し、計算量を削減しています。 離散ウェーブレット変換(DWT)を利用して局所的なコントラスト特徴を抽出し、2Dエントロピーに基づいた手法で統合します。 実験結果は、既存のモデルと比較して、提案モデルがより高い予測精度と低い計算量で優れていることを示しています。 このモデルは、画像およびビデオ圧縮、画像セグメンテーション、リモートセンシング、ロボット工学などの分野での応用が期待されています。 今後の研究では、グローバルな顕著性情報とトップダウンの特徴を取り入れ、ビデオシーケンスにおける顕著性の動的な予測を目指しています。


Q:この論文の主要な貢献を3つ挙げてください
A:
この論文の主要な貢献は以下の3点です。
-
計算複雑性の軽減: 提案モデルは、顕著性の計算に必要なカラーチャンネル数を制限することで、計算複雑性を大幅に削減しています。具体的には、輝度(Y)とクロミナンス(Cr)の2つのチャンネルのみを使用し、既存のモデルと比較して91%の複雑さ削減、Murrayらのモデル と比較して25%の複雑さ削減を達成しています。
-
2Dエントロピーに基づく特徴の組み合わせ: 特徴マップの2Dエントロピーを重みとして使用し、特徴の組み合わせを優先順位付けすることで、顕著性の予測精度を向上させています。エントロピーが高い特徴マップは顕著なコンテンツが高いことを示し、より低いエントロピーの特徴マップよりも高い優先度を与えます。
-
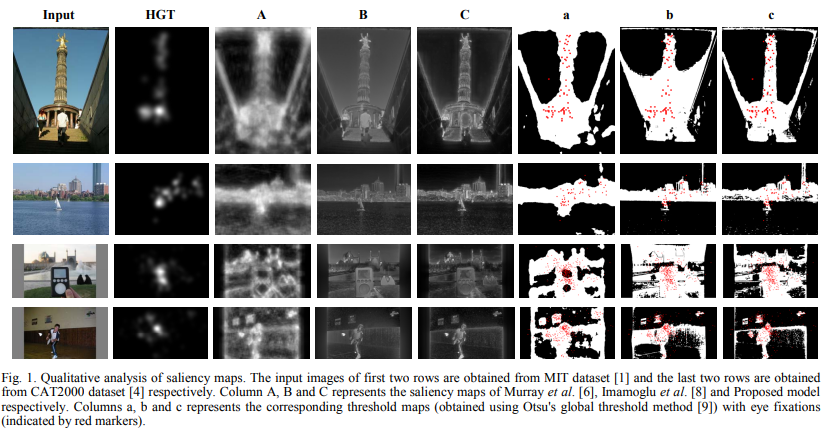
既存モデルとの比較における性能: MITデータセット とCAT2000データセット において、CC(ピアソンの相関係数)とNSS(正規化スキャンパス顕著性)の点で、Murrayらのモデル およびImamogluらのモデル と比較して優れた性能を発揮し、AUC(ROC曲線下面積)の点で同等以上の性能を示しています。
Q:この論文の提案手法を説明してください.またアルゴリズムをわかりやすく疑似コードとして提示でしてください
A:
この論文で提案されている視覚顕著性モデルは、人間の視覚システムがどのように画像の重要な領域を選択的に注意を向けるかを模倣することを目的としています. モデルは、輝度(Y)とクロミナンス(Cr)の2つのチャンネルを使用して、画像の顕著な領域を予測します。
提案手法の主なステップは以下の通りです:
-
色の変換:
- 入力RGB画像をYCbCr色空間に変換します。YCbCr色空間は、輝度(明るさ)とクロミナンスのチャンネルを個別に表現できるため、RGB色空間よりも適しています.
- 変換されたチャンネルに対して、2Dガウスローパスフィルタを適用し、色変換によって生じる高周波ノイズを除去します。
-
多重スケール特徴抽出:
- 離散ウェーブレット変換(DWT) を使用して、YチャンネルとCrチャンネルを複数のスケールに分解します。DWTは、信号を低周波成分と高周波成分に分離し、ローカルなコントラストの変動を高周波成分で表現します。
- 各スケールで、高周波成分(水平、垂直、対角方向の詳細) を抽出し、逆DWT(IDWT) を適用して、特徴マップを生成します。これにより、エッジからテクスチャまでの詳細を複数の分解レベルで表現する特徴マップが作成されます。
-
エントロピーに基づく特徴の組み合わせ:
- 各特徴マップの2Dエントロピーを計算し、これを特徴の組み合わせの重みとして使用します。エントロピーが高い特徴マップは、顕著なコンテンツが高いことを示します。
- 各レベルの特徴マップにその2Dエントロピー値を掛け合わせ、重み付けされた特徴マップを作成します。
- YチャンネルとCrチャンネルの重み付けされた特徴マップを組み合わせ、最終的な組み合わせマップを生成します。
-
正規化と強調:
- 組み合わせマップを2Dガウスローパスフィルタで平滑化し、ウェーブレット処理による高周波ノイズを除去します。
- 組み合わせマップをの範囲に正規化し、すべての詳細が同じ範囲内に収まるようにします。
- 自然対数変換を使用して、正規化されたマップを強調し、強度値のダイナミックレンジを圧縮して、顕著な領域を強調します。
以下に疑似コードを示します。
function SaliencyMap = WaveletSaliency(InputImage)
// 1. 色の変換
YCbCrImage = RGBtoYCbCr(InputImage) // RGB画像をYCbCr色空間に変換
YChannel = YCbCrImage.Y // 輝度チャンネル
CrChannel = YCbCrImage.Cr // クロミナンスチャンネル
YChannel = GaussianFilter(YChannel, sigma=3) // ガウスフィルタを適用
CrChannel = GaussianFilter(CrChannel, sigma=3) // ガウスフィルタを適用
// 2. 多重スケール特徴抽出
N = log2(max(width(InputImage), height(InputImage))) // 分解レベル数を計算
for i = 1 to N
// DWTを適用
Y_DWT[i] = DWT(YChannel, level=i, wavelet='bior4.4')
Cr_DWT[i] = DWT(CrChannel, level=i, wavelet='bior4.4')
// 高周波成分を抽出してIDWTを適用
Y_FeatureMap[i] = IDWT(Y_DWT[i].highpass)
Cr_FeatureMap[i] = IDWT(Cr_DWT[i].highpass)
end
// 3. エントロピーに基づく特徴の組み合わせ
for i = 1 to N
Y_Entropy[i] = CalculateEntropy(Y_FeatureMap[i]) // エントロピーを計算
Cr_Entropy[i] = CalculateEntropy(Cr_FeatureMap[i]) // エントロピーを計算
Y_WeightedFeatureMap[i] = Y_FeatureMap[i] * Y_Entropy[i] // 重み付け
Cr_WeightedFeatureMap[i] = Cr_FeatureMap[i] * Cr_Entropy[i] // 重み付け
end
// 特徴マップを組み合わせる
CombinedMap = 0
for i = 1 to N
CombinedMap = CombinedMap + abs(Y_WeightedFeatureMap[i]) + abs(Cr_WeightedFeatureMap[i])
end
// 4. 正規化と強調
CombinedMap = GaussianFilter(CombinedMap, sigma=5) // ガウスフィルタを適用
NormalizedMap = Normalize(CombinedMap) // 正規化
SaliencyMap = log(1 + NormalizedMap) // 自然対数変換
return SaliencyMap
end
この疑似コードは、提案されたモデルの主要なステップを簡略化して表現しています。 実際のコードでは、ウェーブレット変換、エントロピー計算、フィルタリング、正規化などの処理に、より具体的な関数やライブラリを使用する必要があります。
Q:ウェーブレット変換を利用する利点は何ですか?
A:
ウェーブレット変換(WT)を利用する利点は、主に以下の点にあります。
- 多重解像度解析:WTは、多重解像度解析を提供し、画像を複数のスケールでローカルに分析できます。これにより、異なるスケールでの画像の顕著性を評価することが可能になります。
- ローカルな顕著性分析:WTを使用すると、画像のローカルな顕著性の詳細を分析できます。これは、周波数モデルがグローバルなコンテキストで顕著性を評価するのとは対照的です。
- 高周波成分によるコントラスト変動の表現:ローカルなコントラストの変動は、DWTの高域通過周波数成分でより良く表現されます。DWTは、信号を独立した周波数成分(低域通過および高域通過)に分解する一連のフィルタを使用します。
- エッジからテクスチャまでの詳細の表現: 高周波成分(水平、垂直、対角方向の詳細) を抽出し、逆DWT(IDWT) を適用して、特徴マップを生成します。これにより、エッジからテクスチャまでの詳細を複数の分解レベルで表現する特徴マップが作成されます。
- ノイズに対する処理: Scharfenbergerらのモデルは、ノイズの多い画像を扱うために設計されたウェーブレットベースの統計モデルを提案しています。
これらの利点により、ウェーブレット変換は、視覚的な顕著性モデルにおいて、ローカルな詳細を捉え、異なるスケールで情報を分析するための強力なツールとなります。
Q:YCbCr色空間を使用する利点は何ですか?
A:
YCbCr色空間を使用する利点は、主に以下の点にあります。
- 輝度とクロミナンスの分離:YCbCr色空間は、輝度(明るさ) と クロミナンス(色) のチャンネルを個別に表現できます。これにより、画像処理において、明るさと色を別々に扱うことが可能になります。
- 人間の視覚特性との適合性:人間の目は、色よりも明るさに対してより敏感です。YCbCr色空間は、この人間の視覚特性を考慮して設計されており、輝度チャンネル(Y) を特に重視した処理に適しています。
- RGB色空間との比較:論文では、YCbCr色空間がRGB色空間よりも優れているとされています。これは、YCbCr色空間が輝度とクロミナンスを分離して扱えるため、視覚的な顕著性をより効果的に捉えることができるためです。
- 色の変換:提案手法では、入力RGB画像をYCbCr色空間に変換し、変換されたチャンネルに対して2Dガウスローパスフィルタを適用することで、色変換によって生じる高周波ノイズを除去しています。
- 計算複雑性の軽減: 提案モデルでは、YCbCr色空間の輝度(Y)とクロミナンス(Cr)の2つのチャンネルのみを使用することで、計算複雑性を軽減しています。実験結果から、Cbチャンネルが顕著性の予測にほとんど貢献しないことが示され、これを削除することでモデルの複雑さを軽減しています。
Q:このモデルの主な目的は何ですか?
A:
このモデルの主な目的は以下の通りです。
- 人間の視覚システムが画像の重要な領域を選択的に注意を向ける方法を模倣すること。
- 視覚的な顕著性を予測するために、計算複雑性を軽減し、予測精度を向上させること。
- ローカルなコントラストの特徴を使用して、静止画像内の人間の目の動きを予測すること。
- 輝度(Y) と クロミナンス(Cr) の2つのチャンネルのみを使用することで、顕著性の計算に必要なカラーチャンネル数を制限し、計算コストを削減すること。
- 2Dエントロピーに基づく特徴の組み合わせによって、顕著性の予測精度を向上させること。エントロピーが高い特徴マップは、顕著なコンテンツが高いことを示し、より高い優先度を与えます。
- 既存のウェーブレットベースの顕著性検出モデルと比較して、計算複雑さを軽減しつつ、同等以上の予測精度を達成すること。
- 特に、既存のモデルであるMurrayらのモデル および Imamogluらのモデル と比較して、CC(ピアソンの相関係数) と NSS(正規化スキャンパス顕著性) の点で優れた性能を発揮し、AUC(ROC曲線下面積) の点で同等以上の性能を示すこと。
- 最終的には、画像およびビデオ圧縮、画像セグメンテーション、リモートセンシング、ロボティクス など、多くの分野での応用を目指すこと。
Q:既存モデルと比較した提案手法の利点は何ですか?
A:
提案手法は、既存のモデルと比較して、主に計算複雑性と予測精度の面で利点があります。
-
計算複雑性の軽減:
- 提案モデルは、顕著性の計算に必要なカラーチャンネル数を制限することで、計算複雑性を大幅に削減しています。具体的には、輝度(Y) と クロミナンス(Cr) の2つのチャンネルのみを使用しています。
- 既存のモデルであるImamogluらのモデルと比較して91%、Murrayらのモデルと比較して**25%**の複雑さ削減を達成しています。
- 実験結果から、Cbチャンネルが顕著性の予測にほとんど貢献しないことが示され、これを削除することでモデルの複雑さを軽減しています。
-
予測精度の向上:
- 2Dエントロピーに基づく特徴の組み合わせにより、顕著性の予測精度を向上させています。特徴マップの2Dエントロピーを重みとして使用し、特徴の組み合わせを優先順位付けします。エントロピーが高い特徴マップは顕著なコンテンツが高いことを示し、より低いエントロピーの特徴マップよりも高い優先度を与えます。
- MITデータセットとCAT2000データセットにおいて、CC(ピアソンの相関係数) と NSS(正規化スキャンパス顕著性) の点で、MurrayらのモデルおよびImamogluらのモデルと比較して優れた性能を発揮しています。AUC(ROC曲線下面積) の点では、同等以上の性能を示しています。
-
ローカルな顕著性分析
- ウェーブレット変換(WT)を利用することで、画像のローカルな顕著性の詳細を分析できます。これは、周波数モデルがグローバルなコンテキストで顕著性を評価するのとは対照的です。
-
人間の視覚特性との適合性
- YCbCr色空間を使用することで、人間の目が色よりも明るさに対してより敏感であるという特性を考慮した処理が可能です。
これらの利点により、提案手法は、計算資源が限られた環境でも、高精度な顕著性予測を実現できます。
Q:最終的な顕著性マップはどのように生成されるか?
A:
最終的な顕著性マップは、以下の手順で生成されます。
-
色空間変換:
- まず、入力RGB画像がYCbCr色空間に変換されます。
- これは、人間の目が色よりも明るさに対して敏感であるという視覚特性を考慮し、輝度(Y)とクロミナンス(Cr)のチャンネルを分離して扱うためです。
-
ガウスぼかし:
- 変換されたYCbCrチャンネルは、2Dガウスローパスフィルタで畳み込まれ、色変換によって生じる高周波ノイズを除去します。
-
多重解像度特徴抽出:
- 次に、離散ウェーブレット変換(DWT) が、輝度(Y)およびクロミナンス(Cr)チャンネルに適用され、複数のスケールでローカルなコントラスト特徴が抽出されます。
- DWTは、信号を独立した周波数成分(低域通過および高域通過)に分解し、高域通過成分はローカルなコントラストの変動をより良く表現します。
- 逆DWT(IDWT) が、高周波成分(水平、垂直、対角方向の詳細)に適用され、特徴マップが生成されます。これにより、エッジからテクスチャまでの詳細を複数の分解レベルで表現する特徴マップが作成されます。
-
エントロピーに基づく特徴の組み合わせ:
- 各特徴マップの2Dエントロピーが計算され、特徴マップの組み合わせに重みを付けます。
- エントロピーが高い特徴マップは、顕著なコンテンツが高いことを示し、より高い優先度を与えます。
- 重み付けされた特徴マップは、組み合わされて結合マップが作成されます。
-
正規化と強調:
- 結合マップは、2Dガウスローパスフィルタで平滑化され、ウェーブレット処理による高周波ノイズを除去します。
- 次に、結合マップは0から1の範囲に正規化されます。
- 最後に、正規化されたマップは自然対数変換を使用して強調され、最終的な顕著性マップが生成されます。これにより、強度値のダイナミックレンジが圧縮され、顕著な領域が強調されます。
提案モデルでは、YCbCr色空間の輝度(Y)とクロミナンス(Cr)の2つのチャンネルのみを使用することで、計算複雑性を軽減しています。また、2Dエントロピーに基づく特徴の組み合わせによって、顕著性の予測精度を向上させています。
Q:提案モデルは既存モデルと比べ、計算量はどれほど削減されたか?
A:
提案モデルは、既存モデルと比較して、計算量を大幅に削減しています。
- Imamogluらのモデルと比較して**91%**の計算量削減を達成しています。
- Murrayらのモデルと比較して**25%**の計算量削減を達成しています。
この計算量の削減は、主に以下の要因によるものです。
- 使用するカラーチャンネル数の制限:提案モデルでは、YCbCr色空間の輝度(Y)とクロミナンス(Cr)の2つのチャンネルのみを使用しています。これにより、顕著性の計算に必要な情報量を削減し、計算コストを低減しています。実験結果から、Cbチャンネルが顕著性の予測にほとんど貢献しないことが示され、これを削除することでモデルの複雑さを軽減しています。
- 2Dエントロピーに基づく特徴の組み合わせ:特徴マップの2Dエントロピーを重みとして使用し、特徴の組み合わせを優先順位付けすることで、より効率的な計算を実現しています。エントロピーが高い特徴マップは顕著なコンテンツが高いことを示し、より低いエントロピーの特徴マップよりも高い優先度を与えます。
これらの工夫により、提案モデルは、計算資源が限られた環境でも、高精度な顕著性予測を実現できます。
Q:提案手法の限界と今後の課題はなんですか?
A:
提案手法の限界と今後の課題は、以下の通りです。
-
グローバルな顕著性情報の欠如:
- 提案手法は、ローカルなコントラスト特徴に基づいて顕著性を検出しますが、グローバルな顕著性情報を組み込んでいません。
- 今後の課題として、グローバルな顕著性情報を組み込むことが挙げられています。
-
トップダウン特徴の欠如:
- 提案手法は、ボトムアップの注意メカニズムに焦点を当てていますが、トップダウンの特徴を考慮していません。
- 今後の課題として、トップダウンの特徴を組み込むことが挙げられています。トップダウンの注意は、シーンのコンテキスト、過去の知識、ユーザーの期待などの高レベルの要因に依存する、目標指向のプロセスです。
-
静止画像への限定:
- 提案手法は、静止画像の顕著性検出に焦点を当てています。
- 今後の課題として、ビデオシーケンスにおける顕著性を動的に予測するために、時間的な相関と動きの手がかりを利用することが挙げられています。
-
さらなる複雑性の軽減:
- 提案手法は、既存のモデルと比較して計算複雑性を大幅に削減していますが、さらなる複雑性の軽減が依然として重要な課題です。
-
多様なデータセットでの評価:
- 提案手法は、MITデータセットとCAT2000データセットで評価されていますが、より多様なデータセットでの評価が必要です。
-
他の顕著性モデルとの統合:
- 提案手法は、スタンドアロンの顕著性モデルとして開発されていますが、他の顕著性モデルと統合することで、よりロバストなシステムを構築できる可能性があります。
これらの課題に対処することで、提案手法の汎用性と応用範囲をさらに拡大できると期待されます。