背景
表題通りですが、UnitV AI CameraとMaixPyの self learning classifierで遊びます。
self learning classifier(自己学習分類器?)では、開発ボード上でオブジェクトを直接学習し、それを直接使用して分類を行います。
試しに、〇×判定器を作りました。
計算式につけられているのが〇なのか×なのか判定します。

環境
- Windows11
- MaixPy (3ではないほうなので注意)
- UnitV AI Camera(OV7740版)
実装
- 公式wikiの self learning classifierの使い方をもとに進めていきます。
- More Usages > Neural Network Applications>Image Processing>self learning classifier
- MaixPy3版もあり、こちらの説明のほうが充実しているため参考にはなります。
1. MaixPy IDEのインストール
MaixPy IDEは、k210マイコンでプログラミングするためのツールです。
こちらからインストールします。
MaixPy3もあるため、注意が必要です。
2. kflash_guiのインストール
kflash_guiは、いわゆるマイコンにbin等のファームウェアを書き込むツールです。
こちらからインストールします。
Windowsでしたので、kflash_gui_v1.8.1_windows.7zを選択。
3. モデルのダウンロード
学習済みモデルを入れ替えることによって、機能を入れ替えることができます。
Neural Network Applicationsサンプルには、他にも、顔認識や物体認識があります。
3.1 マシンコードの取得
self learning classifierのモデルは、暗号化モデルのため、使うハードウェアのマシンコードの登録が必要です。以下の記事を参考に、マシンコードを取得してください。
3.2 モデルのダウンロード
MaixHubから学習済みモデルをダウンロードします。
下载(ダウンロード)ボタンを押します。

以下の画面が出ますので、3.1で取得したマシンコードを入力してください。

Self_Learning_Classifier.zipがダウンロードできます。
中に、モデル2つと、サンプルコードが入っています。
4. モデルの書き込み
kflash_guiを起動し、先ほどダウンロードしたモデルをアドレス0x30000に書き込みます。
モデルは2つありますが、今回はsipeed_learn_model.smodelを使います。

self_learn_classifier_lite.smodelは軽いデータ量のモデルで、こちらを使う場合は分類器のインスタンス作成時に、fea_len=512を追加する必要があります。
classifier = kpu.classifier(model, class_num, sample_num, fea_len=512)
5. MaixPy IDEでの書き込み
MaixPyを起動し、先ほどダウンロードしたzipファイルの中にあるself_learning_classifier.pyを呼び出します。
UnitV向け、〇×判定向けにself_learning_classifier.pyを書き換えます。
○か×かの判別のため、分類数を2、名前をmaruとbatsuとします。
また、サンプル数を20にします。
class_num = 2
sample_num = 20
THRESHOLD = 11
class_names = ['maru', 'batsu']
board_cube = 0
カメラの見え方を、UnitVのケーブルが下向き、対象物を正面に左右反転なく見えるよう調整します。
sensor.set_vflip(True)
sensor.set_hmirror(True)
UnitVのボタンのGPIOは18番と19番です。
今回はこちらのボタンを使うため、操作ボタンのGPIOの設定をboard_info.BOOT_KEYから19に変更します。
fm.register(19, fm.fpioa.GPIOHS0)
key = GPIO(GPIO.GPIOHS0, GPIO.PULL_UP)
学習終了後にモデルを保存するように書き換えます。
print("train end")
classifier.save("marubatsu.classifier")
train_status = 1
学習済みの検出中のふるまいを書き換えます。
if res_index >= 0 and min_dist < THRESHOLD :
print("predict result:", class_names[res_index])
if class_names[res_index] =="maru":
img = draw_string(img, 2, 2, class_names[res_index], color=lcd.WHITE,scale=2, bg=lcd.RED)
else:
img = draw_string(img, 2, 2, class_names[res_index], color=lcd.WHITE,scale=2, bg=lcd.BLUE)
else:
print("unknown")
img = draw_string(img, 2, 2, 'unknown', color=lcd.WHITE,scale=2, bg=lcd.BLACK)
UnitVとMaixPyを接続し、self_learning_classifier.pyを実行します。
ファームウェアの全体はgithubにあります。
遊び方
↓ 中国語ですがなんとなく内容の分かる動画。こちらを参考にやります。
1. 登録する分類クラスの代表画像を1枚ずつ撮る
UnitVサイドのボタンを押して撮影します。
撮れると次の指示が出ます。
maruとbatsuそれぞれ撮ります。

2. サンプルを撮る
サンプル数20、分類数2なら、10枚ずつサンプルを連続して撮ります。
サンプル数を分類数で割り、その枚数が各クラスのサンプル数となります。

0から始まっているため、サンプル10からはbatsuのサンプルを撮ります。

3. 完成、分類が始まる
学習が終わると、自動でカメラに映ったものを分類しはじめます。
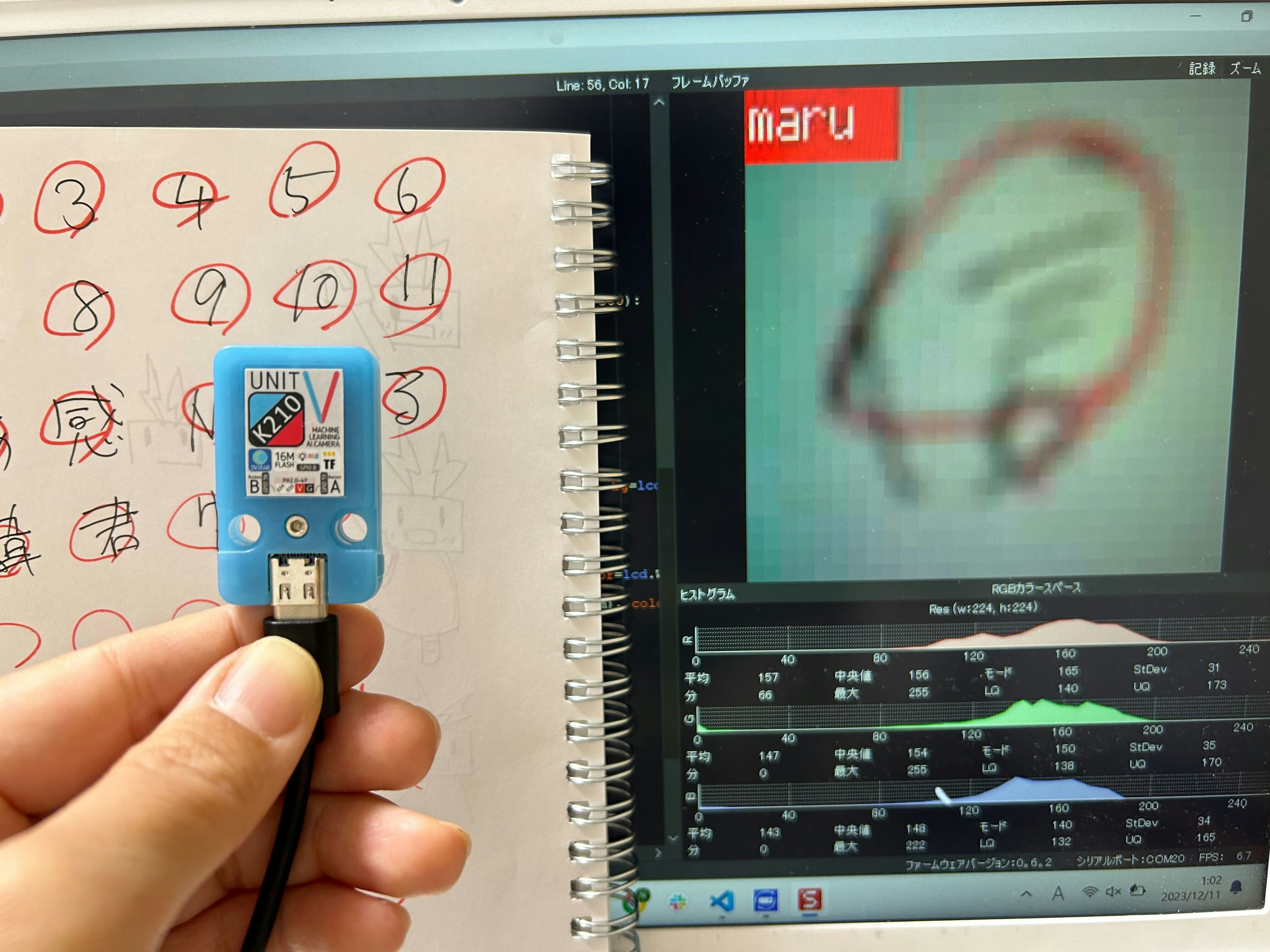
青いマルはmaruとして判定していません。

赤いバツはbatsuと誤判定してますね。サンプルを増やすと変わるかもしれません。

おわりに
学習済みモデルをロードする際は、self_learning_classifier_load.pyを実行し、保存したモデルを呼び出すと実行できます。
UnitVやSipeed Maix等を買ったものの、サンプルを動かして終わりになってしまった方々が、何か作ってみる一助となれば幸いです。
(特にマシンコードの取得等でつまづく)