MuJoCoとは?
Google DeepMind社が提供する物理シミュレーターです。
高速かつ正確な物理演算を特徴としたシミュレーターであり、ロボティクス分野ではロボットシミュレーションや強化学習などに使用されています。
Toroboとは?
東京ロボティクス社が開発する力制御可能な全身人型ロボットです。
新型Toroboは2025年3月頃発売予定(詳細: PR TIMES記事)で、今回はその新型モデルを使用します。

MuJoCoのインストール
使用要件
使用可能OSは、Linux (x86-64 and AArch64)、Windows (x86-64 only)、macOS (universal)で、Python 3.8以上がインストールされていることが前提になります。
なお、必要なPythonバージョンはMuJoCoの更新によって変更になる可能性があるので、MuJoCo公式リポジトリを確認することを推奨します。
実行環境
社内では以下の環境で動作確認済みです。
| 項目 | 仕様 |
|---|---|
| OS | Ubuntu 20.04.6 LTS |
| CPU | Intel Core™ i9-10900X CPU @ 3.70GHz × 20 |
| RAM | 32 GB |
| Storage | 2.5 TB |
| GPU | GeForce RTX 3080 |
| VRAM | 10 GB |
| Python | 3.8.10 |
MuJoCo(Pythonパッケージ)のインストール
pipインストールすることによってインストールが完了します。2024年10月23日時点ではversion 3.2.3がインストールされます。
pip install mujoco
C++で使用したい場合や、URDFをMJCFに変換したい場合は、シミュレーターのインストールも行います。
MuJoCo(シミュレーター)のインストール
Releasesより使用するOSに適した最新版のものをダウンロードし、解凍したフォルダの中にあるmujoco-(version名)フォルダを適当な場所(例: ~/.mujoco/)に配置します。
正しくインストールされているか確認したい場合は、mujoco-(version名)/binフォルダに移動し、以下のコードを実行します。
./simulate ../model/humanoid/humanoid.xml
以下のような画面が出力されていればインストールは成功しています。

Toroboの動作確認
torobo_mujocoを適当な場所にgit cloneします。
git clone https://github.com/TokyoRobotics/torobo_mujoco.git
torobo_mujoco/exampleに移動し、以下のスクリプトを実行します。
python example_torobo2.py
以下の画面が表示されていればOKです。
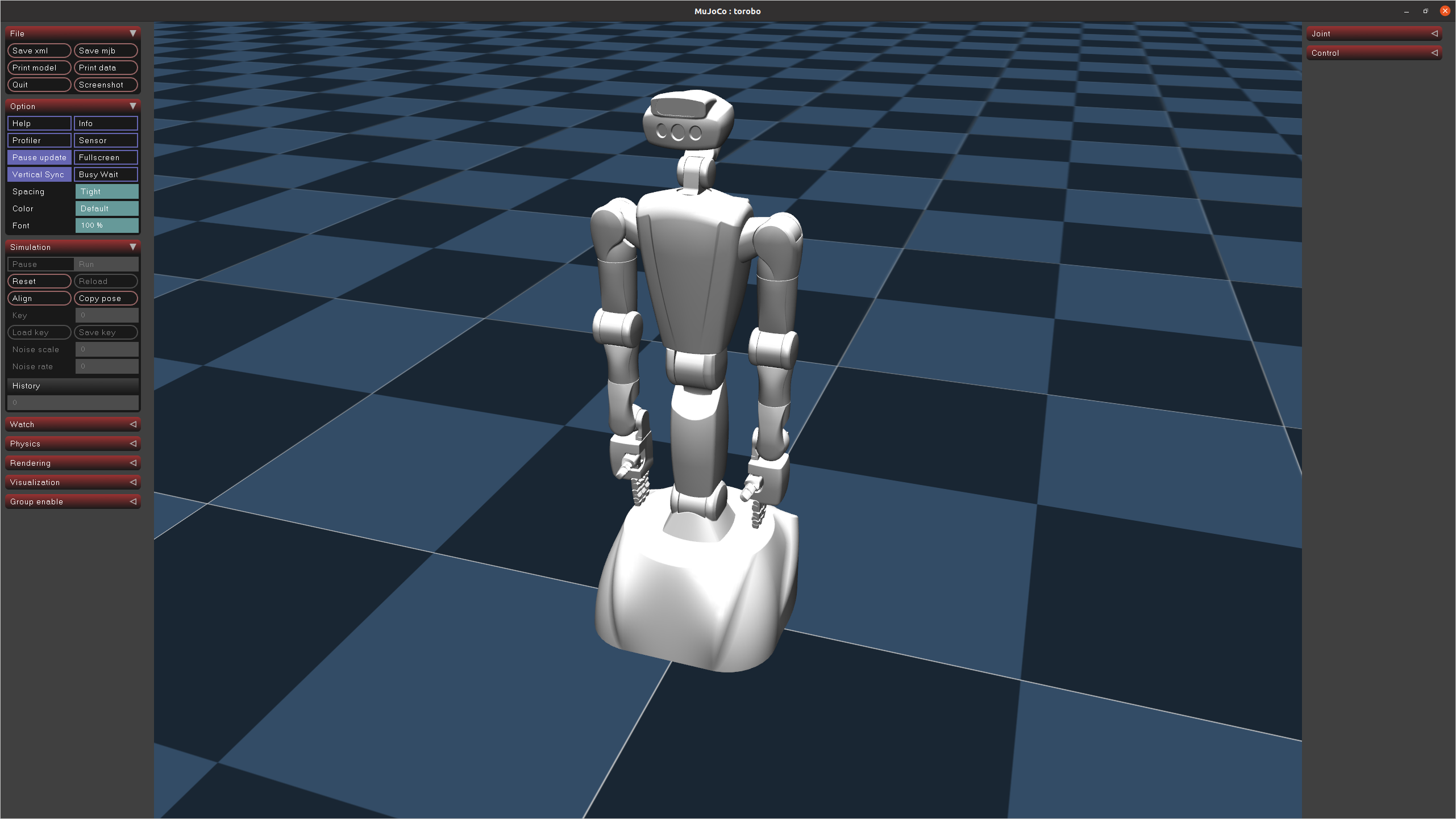
右のControlをクリックするとActuatorのjointが表示されるので、動かしたいjointの欄を左右にドラッグすることによってjointを動かすことができます。

参考