噂の「がいためMulti IMU」を購入したので早速ROS 2に流してみようと思います!
Arduino + Micro-ROS で動かすので誰でもかんたんにできます。
ハマりポイント
- frame_id設定
rosidl_runtime_c__String__assignでStringを代入 - timestamp同期
Micro-ROSにIssueがあったのでそれを参考にsetup時にPCと時間合わせ(オフセット保存)をし、loop内で時間計算 - 単位、正負
単位はsensor_msgs/msg/Imuと同じなので符号だけ変えました
Install
- Spresense SDK、Arduino導入 (本記事では省略します)
- Micro-ROS設定
以下のリポジトリのzipをダウンロードし、スケッチー>ライブラリをインクルードー>zipで改造版micro_ros_arduinoを導入します。
- Agent設定
以下コマンドでAgentを設定できます。
source /opt/ros/$ROS_DISTRO/setup.bash
mkdir uros_ws && cd uros_ws
git clone -b $ROS_DISTRO https://github.com/micro-ROS/micro_ros_setup.git src/micro_ros_setup
rosdep update && rosdep install --from-paths src --ignore-src -y
colcon build
source install/setup.bash
ros2 run micro_ros_setup create_agent_ws.sh
ros2 run micro_ros_setup build_agent.sh
source install/setup.bash
コード
#include <micro_ros_arduino.h>
#include <stdio.h>
#include <sys/ioctl.h>
#include <fcntl.h>
#include <nuttx/sensors/cxd5602pwbimu.h>
#include <arch/board/cxd56_cxd5602pwbimu.h>
#include <rcl/rcl.h>
#include <rcl/error_handling.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
#include <rosidl_runtime_c/string_functions.h>
#include <rmw_microros/rmw_microros.h>
#include <sensor_msgs/msg/imu.h>
static rcl_allocator_t allocator;
static rclc_support_t support;
static rcl_node_t node;
static rcl_publisher_t publisher;
sensor_msgs__msg__Imu msg;
#define RCCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){error_loop();}}
#define RCSOFTCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){}}
#define CXD5602PWBIMU_DEVPATH "/dev/imu0"
#define MAX_NFIFO (4)
static cxd5602pwbimu_data_t g_data[MAX_NFIFO];
int devfd;
int ret;
static int start_sensing(int fd, int rate, int adrange, int gdrange,
int nfifos)
{
cxd5602pwbimu_range_t range;
ioctl(fd, SNIOC_SSAMPRATE, rate);
range.accel = adrange;
range.gyro = gdrange;
ioctl(fd, SNIOC_SDRANGE, (unsigned long)(uintptr_t)&range);
ioctl(fd, SNIOC_SFIFOTHRESH, nfifos);
ioctl(fd, SNIOC_ENABLE, 1);
return 0;
}
static int drop_50msdata(int fd, int samprate)
{
int cnt = samprate / 20; /* data size of 50ms */
cnt = ((cnt + MAX_NFIFO - 1) / MAX_NFIFO) * MAX_NFIFO;
if (cnt == 0) cnt = MAX_NFIFO;
while (cnt)
{
read(fd, g_data, sizeof(g_data[0]) * MAX_NFIFO);
cnt -= MAX_NFIFO;
}
return 0;
}
void error_loop() {
while(1) {
digitalWrite(LED0, !digitalRead(LED0));
delay(100);
}
}
void setup() {
board_cxd5602pwbimu_initialize(5);
devfd = open(CXD5602PWBIMU_DEVPATH, O_RDONLY);
start_sensing(devfd, 960, 16, 4000, MAX_NFIFO);
drop_50msdata(devfd, 960);
// dump_data(devfd);
set_microros_transports();
delay(2000);
allocator = rcl_get_default_allocator();
RCCHECK(rclc_support_init(&support, 0, NULL, &allocator));
// node名
RCCHECK(rclc_node_init_default(&node, "gaitame_imu_node", "", &support));
RCCHECK(rclc_publisher_init_default(
&publisher, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(sensor_msgs, msg, Imu),
"/imu" // topic名
));
String frame_id = "imu"; // tf名
rosidl_runtime_c__String__init(&msg.header.frame_id);
rosidl_runtime_c__String__assign(&msg.header.frame_id, frame_id.c_str());
rmw_uros_sync_session(1000);
digitalWrite(LED0, HIGH);
}
void loop() {
ret = read(devfd, g_data, sizeof(g_data[0]) * MAX_NFIFO);
if(ret == sizeof(g_data[0]) * MAX_NFIFO) {
for(int i=0; i<MAX_NFIFO; i++) {
msg.linear_acceleration.x = -g_data[i].ax;
msg.linear_acceleration.y = -g_data[i].ay;
msg.linear_acceleration.z = -g_data[i].az;
msg.angular_velocity.x = -g_data[i].gx;
msg.angular_velocity.y = -g_data[i].gy;
msg.angular_velocity.z = g_data[i].gz;
int64_t time_ns = rmw_uros_epoch_nanos();
msg.header.stamp.sec = (int32_t)(time_ns / 1000000000);
msg.header.stamp.nanosec = (int32_t)(time_ns % 1000000000);
RCSOFTCHECK(rcl_publish(&publisher, &msg, NULL));
}
}
}
実行
ros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyUSB0
rviz2で確認したい場合は
sudo apt install ros-humble-imu-tools
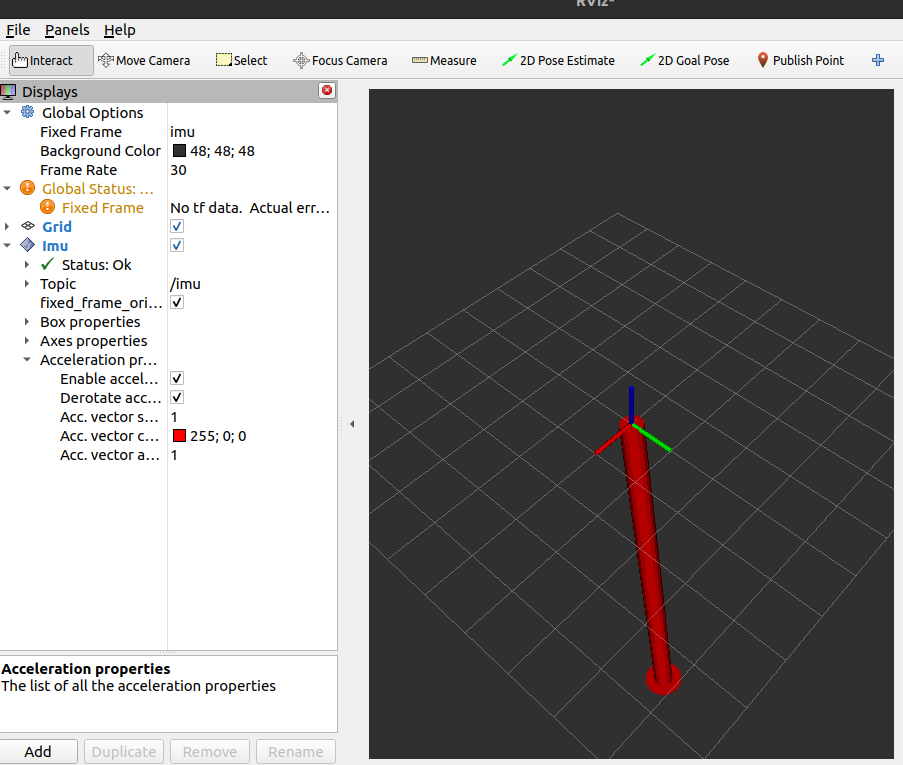
(赤矢印が加速度)
参考
神記事
スケッチ例
単位確認
タイムスタンプ同期