はじめに
基底の取り換えと表現行列の関係について整理しておきます。
線形空間のような抽象的な対象も、基底を定めることで具体的な座標空間として理解できる、という点がおもしろいと感じました。
この記事のまとめ
- ベクトル空間 $V$ に基底を定めると $V \to \mathbf{R}^n$への同型写像が定まり、元を座標で表すことができる
- $V$ の基底を $E,F$、$V'$ の基底を $E',F'$ とし、基底取り換え行列を$
P=\psi_E \circ \phi_F^{-1}, \ Q=\psi_E' \circ \phi_F^{'-1}
$とすると、表現行列 $A,B$ の間に以下の関係が成り立つ
$$
B = Q^{-1} A P
$$ - 特に $V=V'$ の単純な場合は、
$$
B = P^{-1} A P
$$
(参考)
・斎藤正彦「線形代数入門」
・小寺平治「教養の線形代数」
記事を短縮するため、一部の用語の定義を省略しています。各自参照ください。
1.ベクトル空間に基底を定める
ベクトル空間$V$の定義1は非常に抽象的で難しく感じられますが、それ故に様々な集合をベクトル空間の枠組みで議論することができるようになります。
しかし、ベクトル空間 $V$ の元をそのまま扱うのは不便ですから、適当に基底を定めてやって座標を与えると便利です。
具体的には、$V$に$n$個のベクトルからなる基底$\langle e_1,e_2,\cdots e_n\rangle$を定めます。すると元$x\in V$は、
$$x=\sum_i^nx_ie_i$$
のように、$n$個の基底の線形結合で表せます。
また係数を並べることで座標表示できます。
$$x=\begin{pmatrix}x_1\\x_2\\\vdots\\ x_n\end{pmatrix}$$
当たり前じゃん!と思うかもしれませんが、以下の具体例を見ると、基底を定めることの重要性を実感できます。
[具体例1 : (m,n)行列]
・$(m,n)$ 行列全体の集合を考えます。
$$
A=
\begin{pmatrix}
a_{11} & a_{12} & \cdots & a_{1n} \\
a_{21} & a_{22} & \cdots & a_{2n} \\
\vdots & \vdots & & \vdots \\
a_{m1} & a_{m2} & \cdots & a_{mn}
\end{pmatrix}
$$
ここで$(i,j)$ 成分だけが $1$ で、それ以外の成分が $0$ である行列を $E_{ij}$ を導入します。基底を$E=\langle E_{11},E_{12},\cdots,E_{1n},E_{21},\cdots,E_{mn}\rangle$と定めれば、$A$は
$$
A=\sum_{i=1}^{m}\sum_{j=1}^{n}a_{ij}E_{ij}
$$と表すことができます。
座標表示2は
$$A=
\begin{pmatrix}a_{11} \\a_{12} \\\vdots \\a_{mn}
\end{pmatrix}\in \mathbf{R}^{mn}$$このように、$(m,n)$ 行列全体の空間は、適切な基底を定めることで $\mathbf{R}^{mn}$ と同じように扱うことができます。3
[具体例2 : 漸化式]
$$
x_{n+3}+a_3x_{n+2}+a_2x_{n+1}+a_1x_n=0
$$を満たす数列全体の集合$\lbrace x_n\rbrace$はベクトル空間の定義を満たします。
このとき、漸化式の形から、初期値$x_0,\ x_1,\ x_2$が与えられれば数列$\lbrace x_n\rbrace$ は一意に定まります。したがって、3つの初期値に対応するベクトルを基底にとることで、$\lbrace x_n\rbrace$は$\mathbf{R}^3$ と同じように扱うことができます。斎藤P137や小寺演習P146を参照、ついでに特性多項式も。
繰り返しになりますが、抽象ベクトル空間に基底を定めてやれば、座標付きの$\mathbf{R}^n$(親しみのあるn次元ベクトル!)として扱うことができるというのは、非常に便利です。
具体例1は、「$(m,n)$行列全体の集合と$\mathbf{R}^{mn}$が一対一対応するような写像$\psi$を定義した」という見方もできます。この時、$\psi$は全単射なので同型写像といいます。つまり
$n$次元のベクトル空間$V$に基底を定めることは、$V\to\mathbf{R}^{n}$への同型写像を定義することと等価である。
2.基底の選び方と表現行列の関係
前章でベクトル空間$V$の基底を導入したので、元$x\in V$に座標を与えることができました。
同様に$n$次元ベクトル空間$V$から$m$次元ベクトル空間$V'$への線形写像$T:V\to V'$についても、行列で表すことができます。この行列を表現行列と呼びます
では、基底(つまり同型写像$V\to\mathbf{R}^n$)が変わると、表現行列はどのように変化するのでしょうか?
下図4を参照しながら説明します。矢印の向きは写像の方向で、逆向きにたどる操作は逆写像です。一見ややこしい式ですが、矢印の順番を丁寧にたどっていきましょう。
[図中の用語の定義]
- $V$の基底として$\mathrm{E}=\langle e_1,\cdots,e_n\rangle$と、$\mathrm{F}=\langle f_1,\cdots,f_n\rangle$の2種類を定めます。同様に$V'$の基底を$E'$,$F'$と定めます。
- それぞれの基底に対応する同型写像を以下のように定めます。
$$
\begin{align}
&\psi_E : V\to\mathbf{R}^n\ \ ,\ \
\phi_F : V\to\mathbf{R}^n
\\
&\psi_E' : V'\to\mathbf{R}^m,\ \
\phi_F' : V'\to\mathbf{R}^m
\end{align}
$$- $V$($V'$)の基底を取り換えると、それに応じて座標も変わります。変換行列を基底取り換え行列といいます。
$\mathrm{F}\to \mathrm{E}$の基底取り換え行列を$$P=\psi_E\circ\phi_F^{-1}\tag{1}$$$\mathrm{F'}\to \mathrm{E'}$の基底取り換え行列を$$Q=\psi_E'\circ\phi_F^{'-1}\tag{2}$$と定義します。- ※ 表現行列と基底取り換え行列の定義に関して、多くの教科書に載っているように実際に成分を書き下してみるとよいと思います。
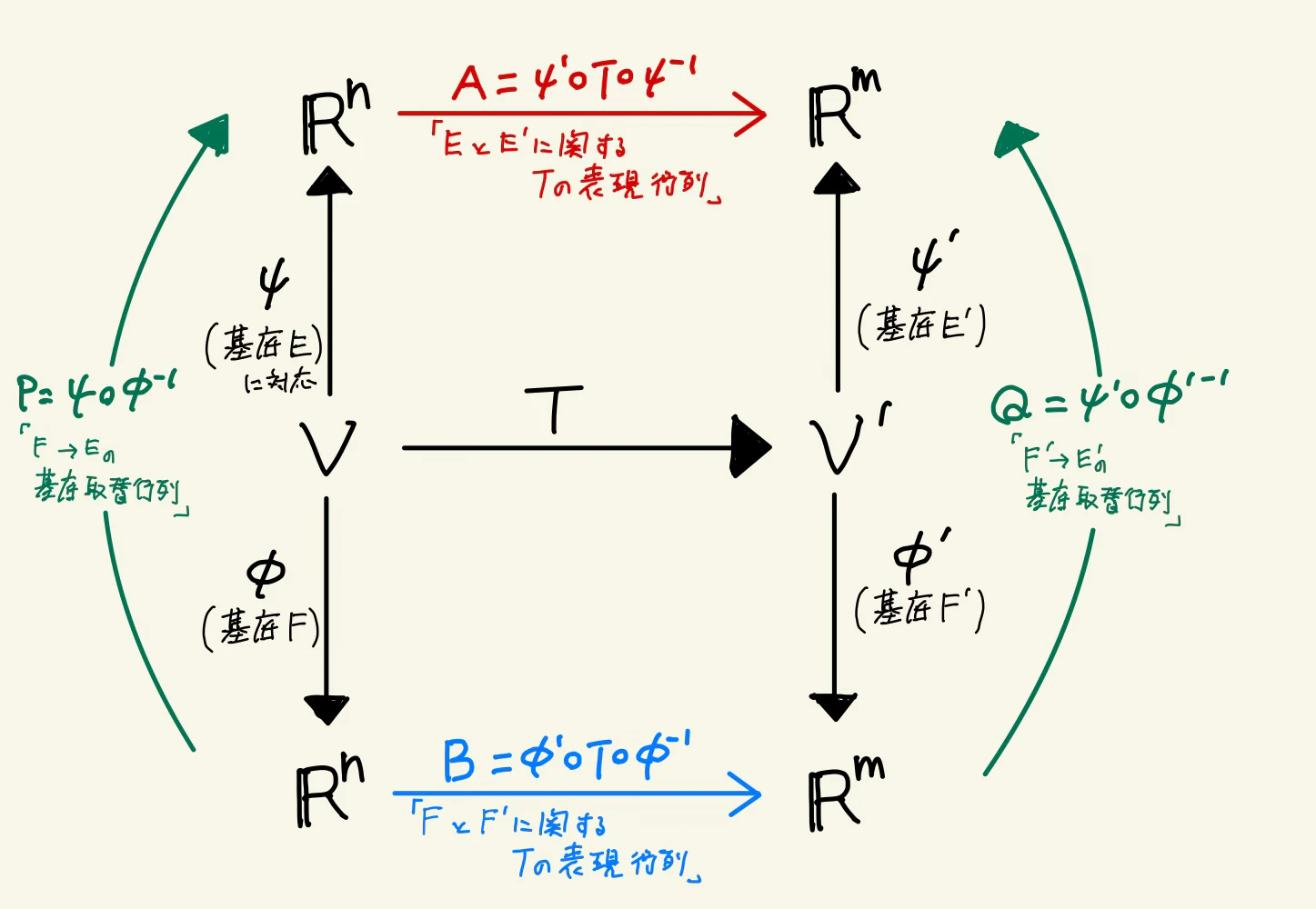
知りたいのは、$\mathrm{E}$と$\mathrm{E'}$に関する$T$の表現行列$A$
$$
A=\psi'\circ T\circ \psi^{-1} \tag{3}
$$と、$\mathrm{F}$と$\mathrm{F'}$に関する$T$の表現行列$B$
$$
B=\phi'\circ T\circ \phi^{-1} \tag{4}
$$の関係式です。
式(3), (4)は$\mathrm{R}^n\to V\to V'\to \mathrm{R}^m$の順に矢印をたどっているだけです。
$B$の表現行列を変形することで、
$$
\begin{align}
B &=\phi'\circ T\circ \phi^{-1}
\\
&= \phi'\circ (\psi^{'-1}\circ\psi')\circ T\circ (\psi^{-1}\circ\psi)\circ\phi^{-1}
\\
&=(\phi'\circ \psi^{'-1}) \circ (\psi'\circ T\circ \psi^{-1})\circ(\psi\circ\phi^{-1})
\\
&=Q^{-1}AP \tag{5}
\end{align}
$$のように、$A$との関係を得ることができました!ここで$P$と$Q$は基底取り換え行列(1),(2)式です。
式の上では恒等写像の挿入という操作ですが、「変換先の空間を往復する操作」という意味に捉えられるでしょう。
式(5)の単純な場合
式(5)は重要な式ですが、基底の取り方に自由度があって少しとっつきづらいように感じられます。
そこで、単純な例として、$V=V'$の同じベクトル空間上の基底の取り換えを考えます。
式(5)で$Q\to P$に置き換えるだけですから
$$B=P^{-1}AP$$とかけます。
この形は見覚えのある方が多いのではないでしょうか。
以上!
おわりに
こちらの図はベクトル空間の本質の理解に通じている良い図だと思い、深堀することにしました。(本質という言葉を使うのは大変おこがましいですが、、、)
-
実数空間$R$上のベクトル空間とします。複素空間でも成り立つのかもしれませんが、あまり詳しくなくて、、、 ↩
-
行列のまま書いた方が分かりやすいかもしれません。
$$
A = a_{11}
\begin{pmatrix}
1 & 0 & \cdots & 0 \\
0 & 0 & \cdots & 0 \\
\vdots & \vdots & & \vdots \\
0 & 0 & \cdots & 0
\end{pmatrix}+a_{12}
\begin{pmatrix}
0 & 1 & \cdots & 0 \\
0 & 0 & \cdots & 0 \\
\vdots & \vdots & & \vdots \\
0 & 0 & \cdots & 0
\end{pmatrix}+\cdots+a_{mn}
\begin{pmatrix}
0 & 0 & \cdots & 0 \\
0 & 0 & \cdots & 0 \\
\vdots & \vdots & & \vdots \\
0 & 0 & \cdots & 1
\end{pmatrix}
$$この係数$a_i$を並べたものが座標表示です。 ↩ -
機械学習においては、この操作は画像の二次元配列を一次元配列に変換する操作に対応している! ↩
-
斎藤正彦「線形代数入門」P115の図を参考にしました。 ↩