背景
大学一年生で線形代数は習ったけどあまり覚えていない、、、という方(主に自分)向けに、教養レベルの線形代数を復習しました。
この記事では、行列の直感的なイメージを重視して整理しました。用語の定義については、解説している記事や本が多く出回っているのため省略しています。
(数学的な厳密さはご容赦願います)
参考:https://youtu.be/1-iybusPjPg?si=FTtKovZ53a1XOB9_
1.行列を線形写像として理解する
1-1. 行列はベクトルを変換する操作である
写像$f$が次の性質を満たすとき、$f$を線形写像と呼びます。
$\mathbb{R}^n$から$\mathbb{R}^n$への写像$f : \mathbb{R}^n\rightarrow\mathbb{R}^m$が
$$
\mathbf{a},\mathbf{b} \in \mathbb{R}^n, k,l\in\mathbb{R} \text{ならば} f(k\mathbf{a}+l\mathbf{b}) = kf(\mathbf{a}) + lf(\mathbf{b})
$$
このとき必ず$m\times n$の行列$A$によって、$\color{red}{f(\mathbf{x})=A\mathbf{x}}$と定めることができます。
つまり行列$A$は、ベクトルを別のベクトルへ変換する操作ルールを示す、と理解できます。1
簡単な例を考えましょう。
$$
A =
\begin{pmatrix}
2 & 1\\
0 & 3
\end{pmatrix}
$$
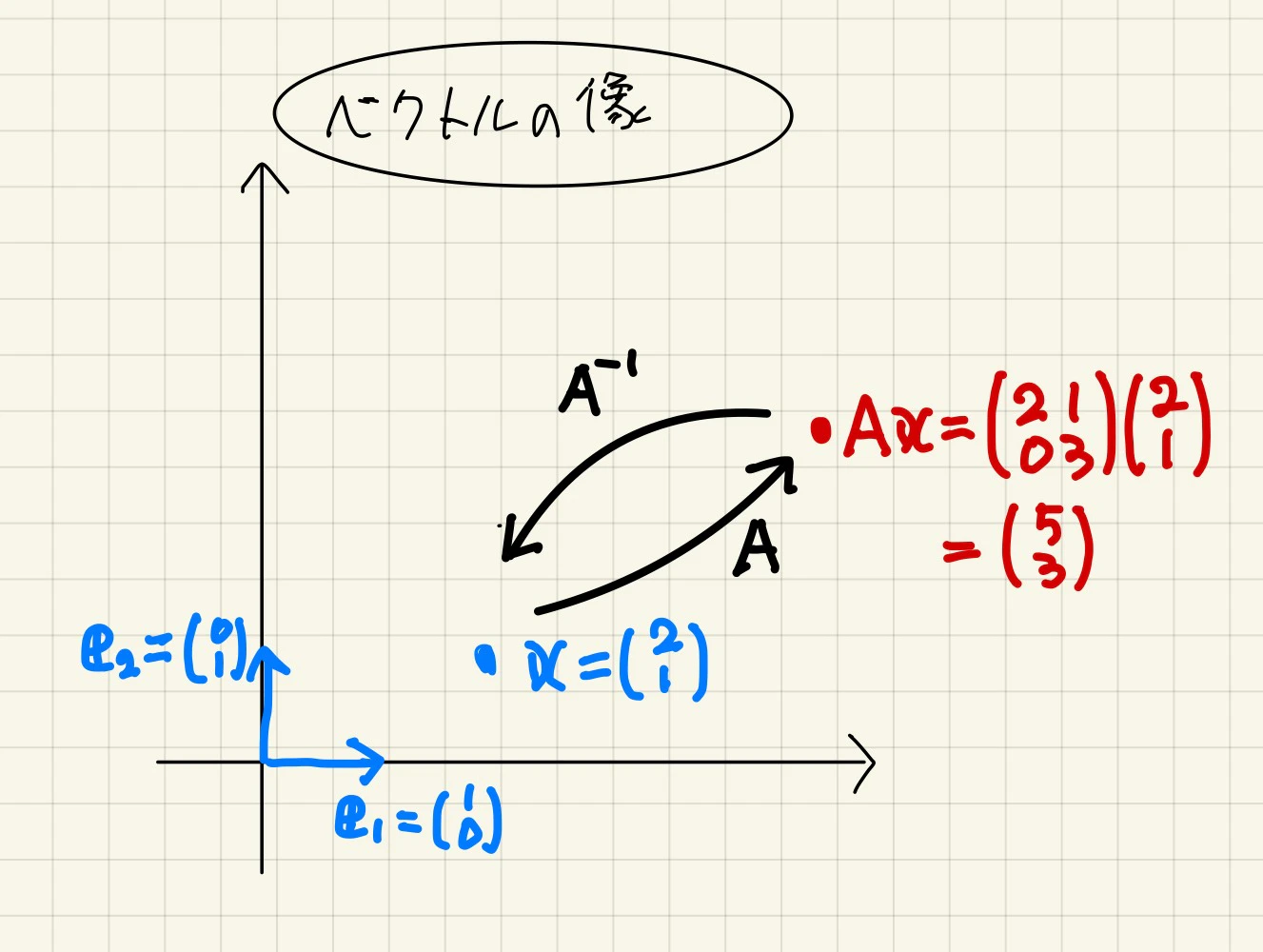
例えば下図のように$A$を$x=(1,2)$に作用させると、$f(\mathbf{x})=A\mathbf{x}=(5,3)$に移されます。このように、$A$はベクトルの変換を表しています。また元に戻す操作を逆行列$A^{-1}$と考えるのは自然でしょう。
「元に戻す操作」という概念は後で重要になります。
1-2. 列ベクトルは基底ベクトルの行き先を表している
座標は基底ベクトルの取り方で変化するので、基底のベクトルの行き先を調べることは本質的です。
基底ベクトルを$\mathbf{e}_1=(1,0),\mathbf{e}_2=(0,1)$とします。$\mathbf{e}_1,\mathbf{e}_2$は下図のように変換されます。
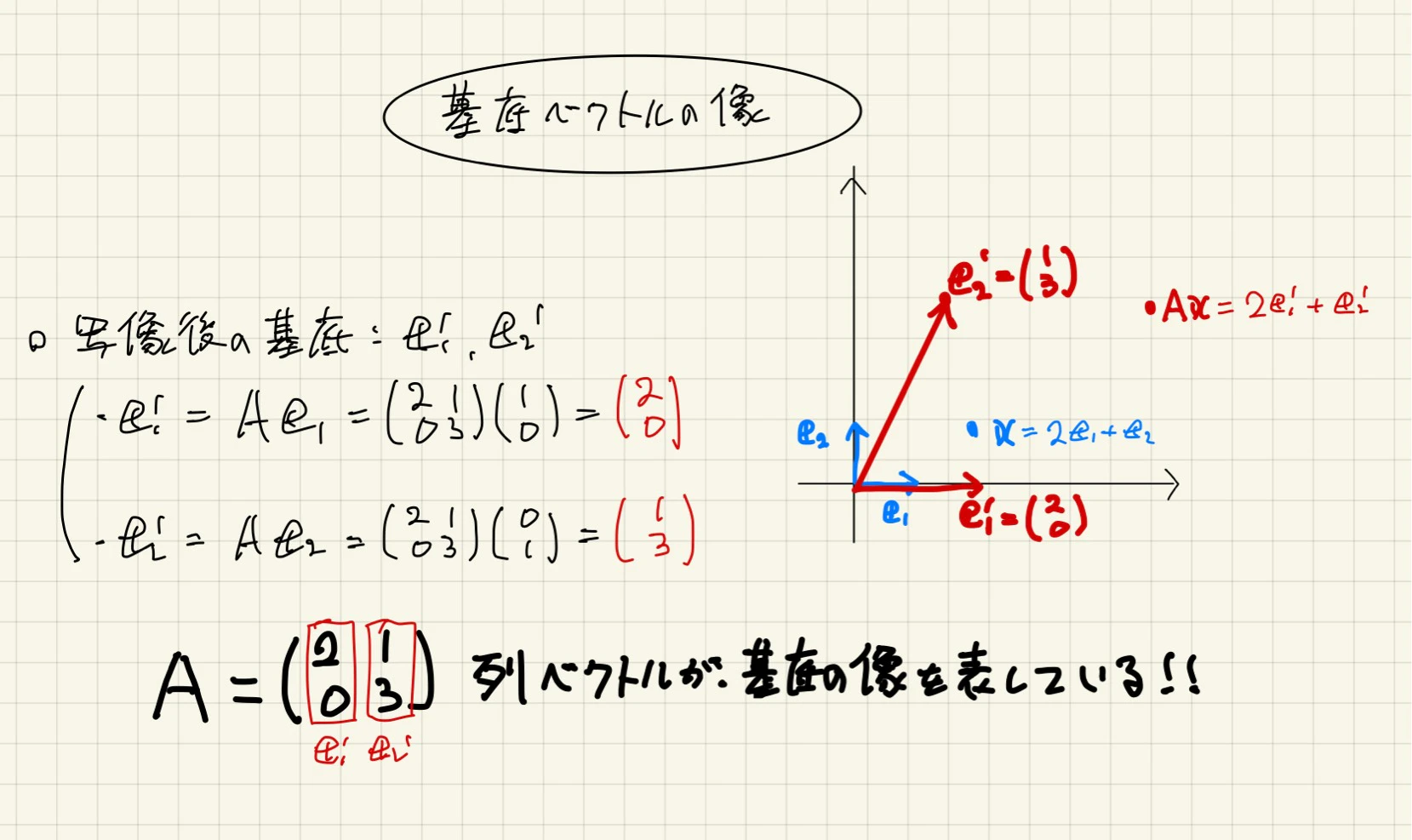
一般に、$\color{red}{\text{行列$A$の各列ベクトルは、基底ベクトルがどこで送られているかを表している}}$
という重要な事実があります。
もし列ベクトル同士が線形従属であれば、行列$A$による変換により次元が下がってしまいます。(=情報が失われる)
次章で詳しく見ていきましょう。
2. 情報が失われる変換
2-1. 次元を押しつぶす変換
$\mathbb{R}^3 \rightarrow \mathbb{R}^2$ の写像を考えてみましょう。
例えば、次のような $2 \times 3$ 行列$A$を考えます。
$$
B=
\begin{pmatrix}
1 & 0 & 1 \\
0 & 1 & 1
\end{pmatrix}
$$
この行列は、3次元空間のベクトルを2次元空間に写します。
3次元空間の標準基底$\mathbf{e}_1=(1,0,0),\mathbf{e}_2=(0,1,0),\mathbf{e}_3=(0,0,1)$がどう写されるかを計算しましょう。これは簡単ですね。
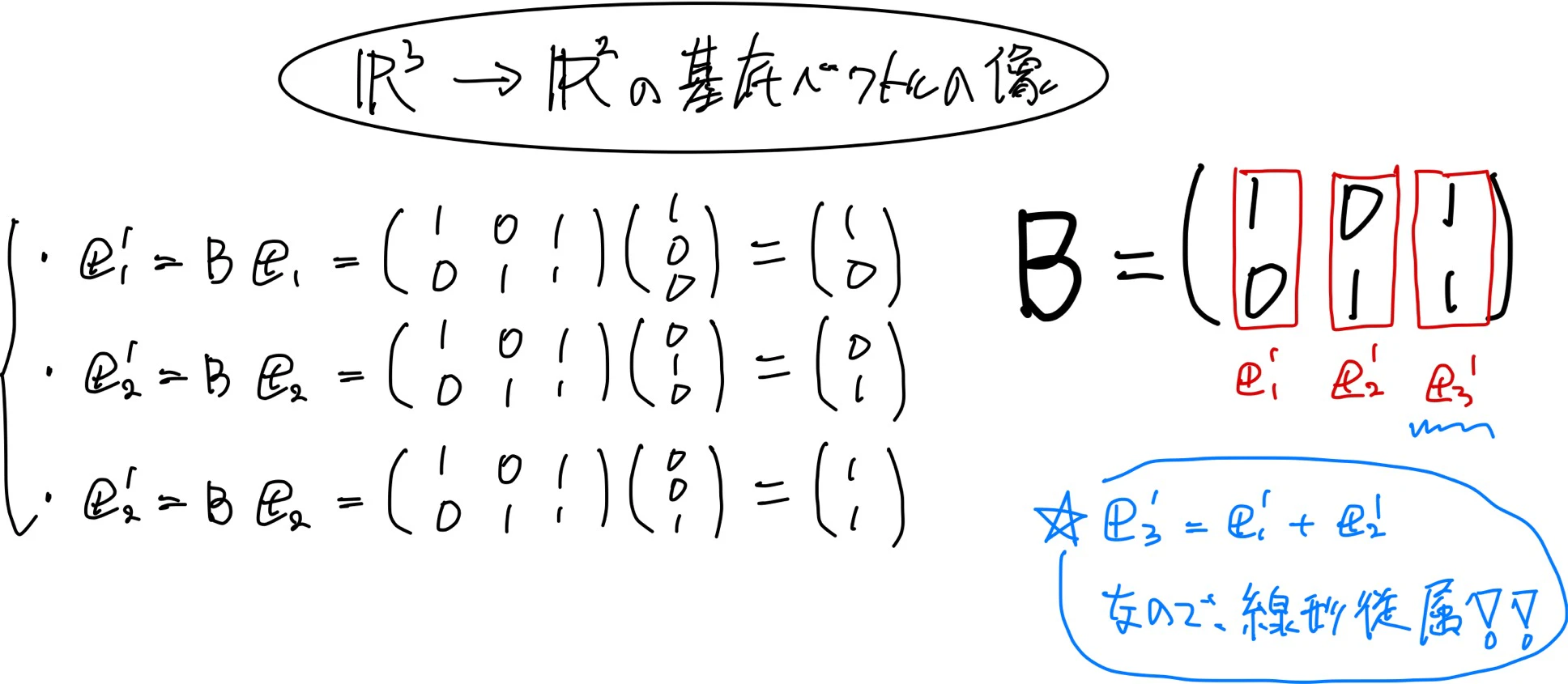
計算の結果で注目するべきは、$B\mathbf{e}_3 = B\mathbf{e}_1 + B\mathbf{e}_2$の関係が成り立っていることです。
このことは一次独立だった3つの基底ベクトル$\mathbf{e}_1,\mathbf{e}_2,\mathbf{e}_3$が、行列$B$によって一次従属になってしまうことを意味します。
変換後に残った基底の数をRankといいます。
情報が失われる(次元が下がる)とは、
独立だった基底ベクトルが、写像後に一次従属になってしまう
といえるでしょう。
2-2. 逆行列が定義できない場合
Chap.1で見た$2*2$行列$
A =
\begin{pmatrix}
2 & 1\\
0 & 3
\end{pmatrix}
$は次元を変えない変換ですから、逆行列が存在するのは自然でしょう。
一方で、行列$B$では3次元$\rightarrow$2次元空間に押しつぶしてしまい、情報を失っているため、一度変換してしまったら元には戻せません。つまり、逆行列は定義できません。2
3. 正則性・逆行列・rankの関係性
これまで見てきた直感的なイメージを、ここで整理してみましょう。
3.1正則性の定義
正方行列 $X$ が正則であるとは、
ある行列 $X^{-1}$ が存在して$$
X^{-1}X = XX^{-1} = I
$$が成り立つことをいいます。
このとき $X^{-1}$ を 逆行列 と呼びます。
- 異なるベクトルは異なるベクトルへ写る
- 逆変換ができる
- 情報が失われていない
3-2行列の rank
Chap.2 では、行列 $B$ による変換で、基底の像が一次従属になってしまう例を見ました。
もともと独立だった方向が、写像の後で重なってしまう。
これが「情報が失われる」ということでした。
このとき重要になるのが rank です。
rank とは、変換後に残っている独立な方向の数
すなわち、行列の列ベクトルの線形独立な本数
rankが変換前の次元より小さくなっていれば、空間が低次元に押しつぶされたことを意味します。3
3-3. まとめ
少し複雑になってきましたが、
- rank が最大(= 変換前の次元と等しい)
- 基底ベクトルの数が変わらない
- 情報が失われていない
- 逆行列が存在する
これらはすべて同じことを言っています。
というわけで、正方行列 $A$ に対して、
$$
A \text{ が正則 } \quad \Longleftrightarrow \quad \mathrm{rank}(A)=n
$$
が成り立ちます($A$ は $n \times n$ 正方行列)。
逆に、$\mathrm{rank}(A) < n$であれば、
- 変換により基底ベクトルの一部が線形従属になった
- 情報が失われている
- 逆行列は存在しない
ということになります。4
正則性・逆行列・rank は、
別々の概念のように見えて、実は同じ現象を違う角度から見ているだけなのです。
おわりに
最近線形代数を学び直したのですが、行列の列ベクトルは基底の変換先であるという気づいたことが、自分の中で大きなパラダイムシフトになりました。
rankを行基本変形で得られる値という理解に留めず、基底ベクトルの変換先という観点で捉え直したことで、像や核といった抽象的な概念もスムーズに理解できるようになりました。
冗長さを防ぐために省略した重要な概念はたくさんあります。
イメージで理解した気にならず、教科書の定理や証明を繰り返し書き写し、演習問題を解くことは大切だと思います。