ROSは聞いたことあるけど、どこから手をつければわからない、という人のために書きます。
ROSとは何か
この文献がとてもわかりやすいので、こちらを参照してください
環境
Ubuntu 16.04 LTS
2GBほどの空き容量
インストール手順
公式のドキュメンテーションもわかりやすいですが、「インストールさえできればいい!」という人向けにコマンドを集めました
UbuntuがROSのaptリポジトリを受け入れるようにする
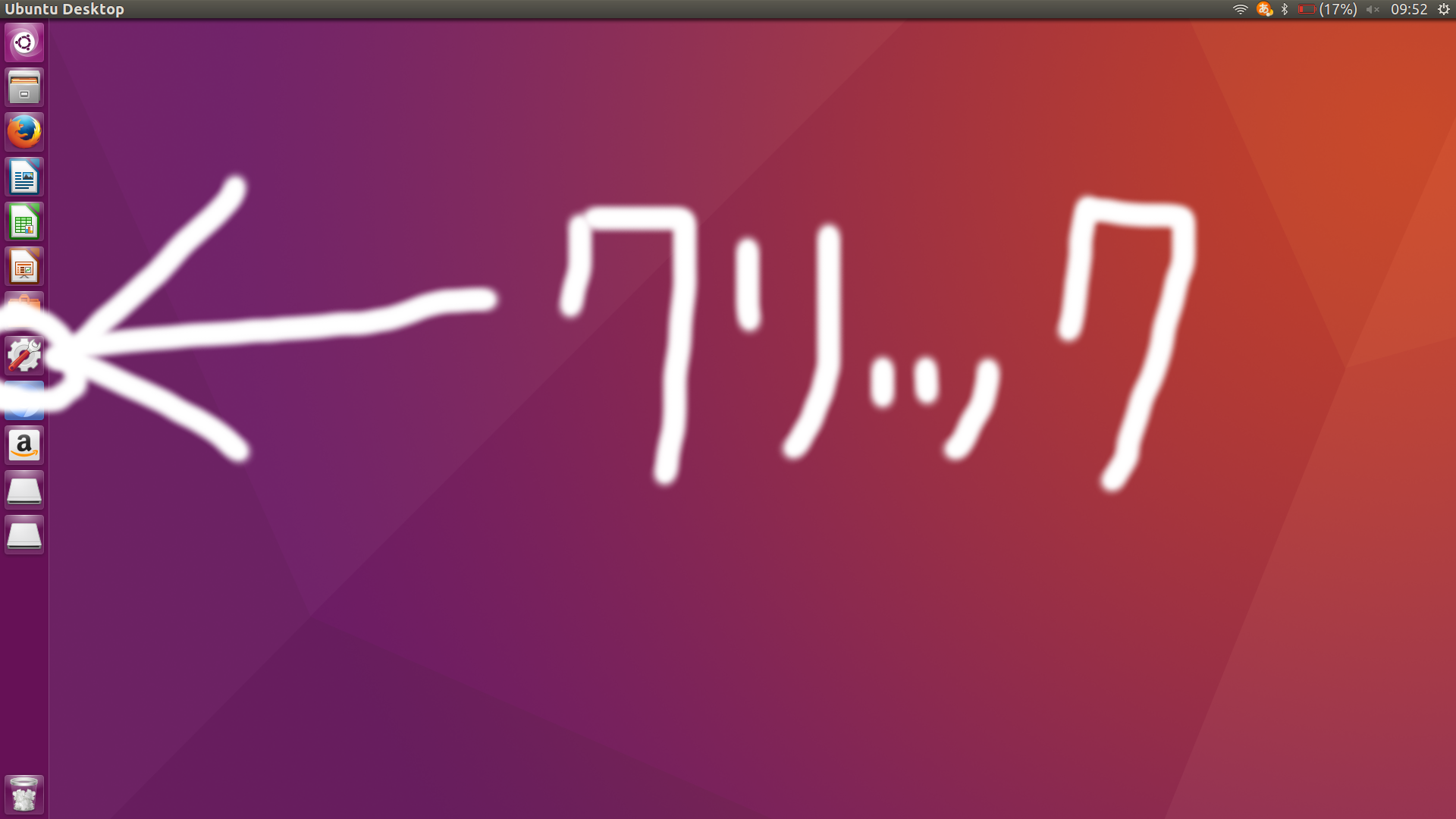
まず設定を開きます
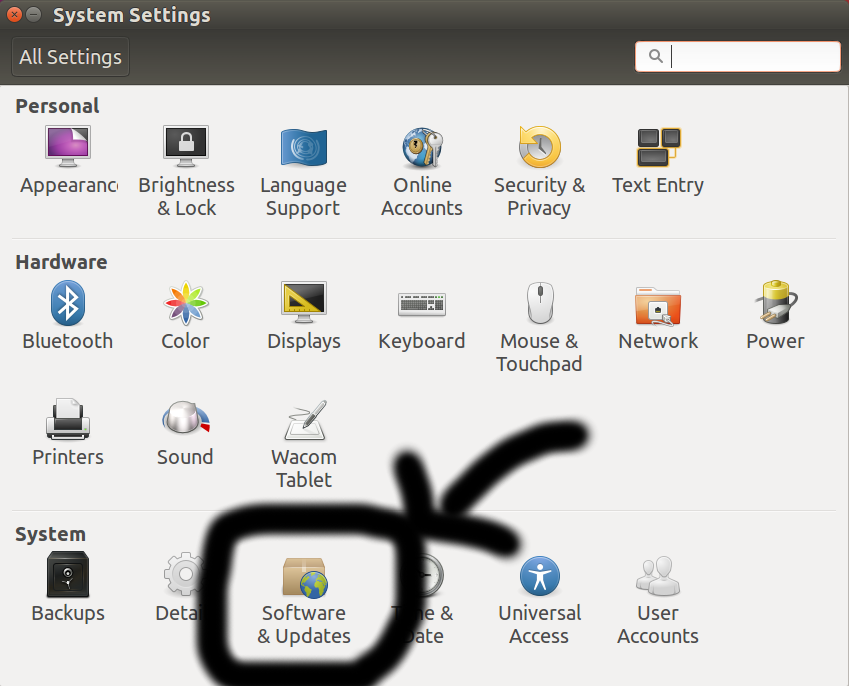
次にこのような画面が出てくるので、ソフトウェアとアップデートの設定を開きます
そして下の画面において、赤い四角で囲った部分にチェックが入っていることを確認します。もしチェックが入っていなかったら、チェックをして,Closeをクリックしてください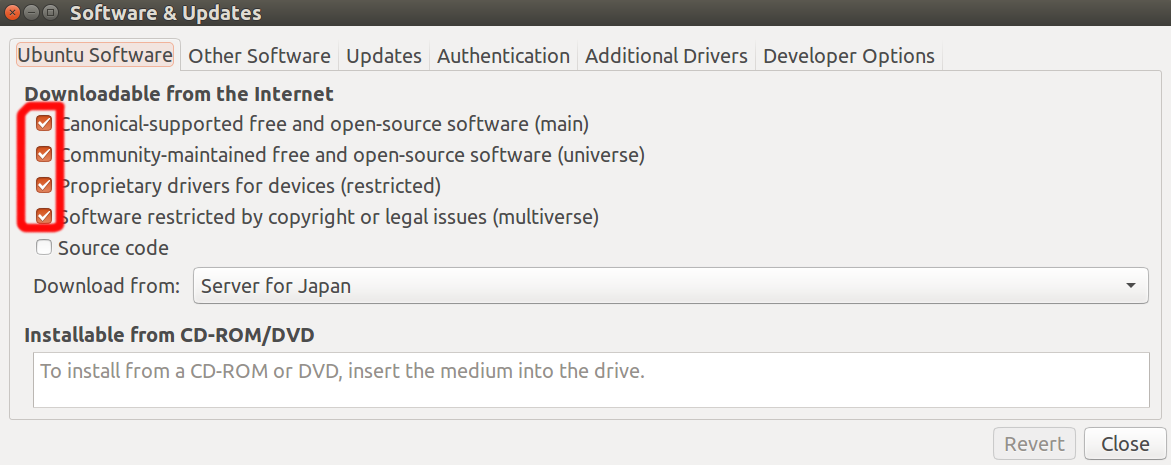
ROSのaptリポジトリをセットアップする
これ以降ターミナルを開いて、以下を実行します。
terminal
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
$ sudo apt-get update
ROSをインストールする
terminal
$ sudo apt-get install ros-kinetic-desktop-full
インストール後のおまじない
terminal
$ sudo rosdep init
$ rosdep update
パスの設定の自動化
terminal
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
これでROSのパスがターミナルを起動するときに、自動的に読み込まれます。
終わったらターミナルを閉じましょう。
動作確認
再びterminalを開き、以下を実行します。
terminal
$ roscore
以下のようになりましたら成功です。
terminal
... logging to /home/[user_name]/.ros/log/[some number]/roslaunch-[your_pc_name].log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://[pc_name]:[port]/
ros_comm version 1.12.6
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.6
NODES
auto-starting new master
process[master]: started with pid [13855]
ROS_MASTER_URI=http://[host_name]:11311/
setting /run_id to [some_number]
process[rosout-1]: started with pid [13868]
started core service [/rosout]