必要なパッケージ
$sudo apt-get install ros-indigo-viz
$sudo apt-get install gazebo4
オプショナル(NVIDIAやRADEON等GPUを使っている場合)
$sudo apt-get install mesa-utils
ソースインストールの作業①
$cd ~/catkin_ws/src
$git clone https://github.com/turtlebot/turtlebot_simulator.git
$rosinstall ~/catkin_ws/src/turtlebot_simulator /opt/ros/indigo
$echo "source ~/catkin_ws/src/turtlebot_simulator/setup.bash" >> ~/.bashrc
#ソースインストールの作業②
$source ~/.bashrc
$cd ~/catkin_ws/src/turtlebot_simulator
$roslocate info turtlebot_simulator > turtlebot_simulator.rosinstall
$rosinstall ~/catkin_ws/src/turtlebot_simulator turtlebot_simulator.rosinstall
依存関係のインストール
$ls ~/catkin_ws/src/turtlebot_simulator
$rosdep install パッケージ名
$rosmake パッケージ名
パッケージ名 = lsで表示されたディレクトリ名です。依存関係エラーが出たものは無視してください。rosmakeできないパッケージはcatkinシステムよりaptで補完されている場合が多いです。
catkinでサポートされているパッケージのインストール
$apt-cache search ros-indigo-gazebo
gazebo4をrosで動作させるためののパッケージ
$sudo apt-get install ros-indigo-gazebo4-ros
このパッケージだけでうまく行かなかったらapt-cacheの一覧のgazebo4 rosパッケージをインストールしてください。prereleaseはインストールしないように、もしインストールしてしまったら依存関係がネストし
$apt-get -f install
で復帰できないので強力なパッケージマネージャーaptitudeを使って
$sudo aptitude install
で復帰してください。aptitudeが開かない場合はaptプロセスをkillしてください。
$ps -ae | grep "apt*"
$sudo pkill --signal SIGKILL apt
$sudo apt-cache search ros-indigo-yocs
yocsはturtlebotの開発会社のyujin roboticsが提供しているパッケージで多分turtlebot系パッケージはindigoの場合こちらへ移行したと考えられるのでここの一覧をすべてインストールしておくと無難です。
$sudo apt-get install ros-indigo-yocs-○○(ここに一覧を入れてください)
そして、遂にgazebo起動です!
$cd ~/catkin_ws/src/turtlebot_simulator/turtlebot_gazebo/launch
$roslaunch turtlebot_world.launch
こんな感じになりました。
subscribeしているtopicが気になったら
$rqt_graph
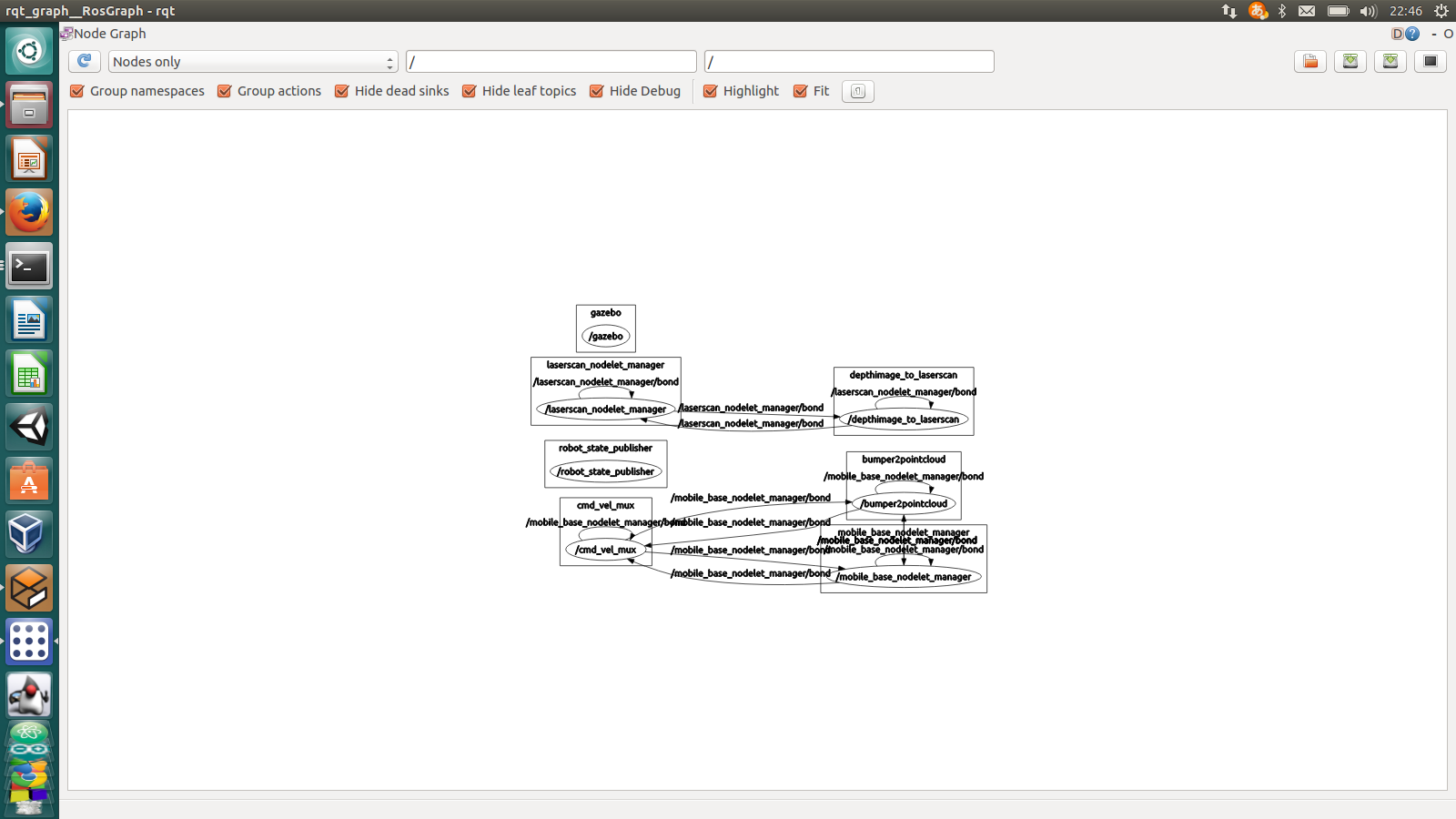
こんな感じになりました。
困ったことがあれば
twitter : @kendemu まで連絡ください。