はじめに
勉強会で採用しているテキストの「一般相対性理論を一歩一歩数式で理解」の第5章「曲線座標のテンソル場」§4「曲線座標の接続係数」では、接続係数という考え方が導入されます。接続係数の概念をつかむのに苦労しましたので、一次元座標での座標変換を例に、接続係数の役割を妄想してみました。一次元の座標では、ベクトルが移動する際はすべて平行移動になります。
直線座標の一次元人のベクトル移動
まずは、直線座標の一次元人の世界(以降、直線世界)の例です。
直線座標の一次元人は、我々の世界の$xy$平面と原点を共有し、$x$軸に平行な直線上で生活をしているとします。全てのxy平面の座標を一次元人の座標で表すことはできませんので、$xy$平面内の$y$ = 0上の座標に限定して、座標変換を行います。
我々の世界の基底ベクトルを$e_x$と$e_y$とし、一次元世界の基底ベクトルを$e_p$とします。さらに、我々が理解しやすいように、ある座標での基底ベクトルに対する法線ベクトルを$e_q$とします。ただし、$e_q$は一次元人には認識できません。直線世界を我々が理解するために導入したものです。
あるベクトル$x$ = ($x$, $y$) = ($p$, $q$)(ただし、$q$ = 0に限定)とおくと、
e_p=\frac{\partial\symbfit{x}}{\partial p}=\left(\begin{matrix}1\\0\\\end{matrix}\right),\ \ e_q=\frac{\partial\symbfit{x}}{\partial q}=\left(\begin{matrix}0\\1\\\end{matrix}\right)
が成り立ちます。さらに微分を行い、それを1階微分と接続係数で表すと、
\frac{\partial^2\symbfit{x}}{\partial p\partial p}=\left(\begin{matrix}0\\0\\\end{matrix}\right)=0\frac{\partial\symbfit{x}}{\partial p}+0\frac{\partial\symbfit{x}}{\partial q}=0e_p+0e_q,\ \ \Gamma_{\ \ \ pp}^p=0,\ \ \Gamma_{\ \ \ \ pp}^q=0
\frac{\partial^2\symbfit{x}}{\partial p\partial q}=\left(\begin{matrix}0\\0\\\end{matrix}\right)=0\frac{\partial\symbfit{x}}{\partial p}+0\frac{\partial\symbfit{x}}{\partial q}=0e_p+0e_q,\ \ \Gamma_{\ \ \ pq}^p=0,\ \Gamma_{\ \ \ \ pq}^q=0
\frac{\partial^2\symbfit{x}}{\partial q\partial q}=\left(\begin{matrix}0\\0\\\end{matrix}\right)=0\frac{\partial\symbfit{x}}{\partial p}+0\frac{\partial\symbfit{x}}{\partial q}=0e_p+0e_q,\ \ \Gamma_{\ \ \ qq}^p=0,\ \Gamma_{\ \ \ \ qq}^q=0
が成り立ちます。$q$ = 0の限定条件があっても、同様の式です。変数$p$のみが変化する一元ですので、以下の式のことのみを考えます。
\frac{\partial^2\symbfit{x}}{\partial p\partial p}=\left(\begin{matrix}0\\0\\\end{matrix}\right)=0\frac{\partial\symbfit{x}}{\partial p}+0\frac{\partial\symbfit{x}}{\partial q}=0e_p+0e_q,\ \ \Gamma_{\ \ \ pp}^p=0,\ \ \Gamma_{\ \ \ \ pp}^q=0
我々が直線世界を理解するために導入した法線ベクトルを使わなくても、$y$ = 0上での移動の際の基底ベクトルの変化を表すことができます。この場合、直線世界の任意の座標($p$, 0)への基底$e_p$の平行移動は$xy$座標でのベクトルの平行移動と一致することを意味します。
曲線座標の一次元人のベクトル移動
次に、曲線座標に住む一次元人の世界(以降、曲線世界)の例をみてみます。
先ほどと同様、$xy$平面のすべての座標を一次元の曲線世界に表すことができません。ここでは、直交座標の$x^2 + y^2 = 1$上の座標を極座標に変換する世界を曲線世界とします。これは、極座標での$r = 1$に限定した座標を意味します。
$x_r = (x, y) = (rcosθ, rsinθ)$ (ただし、$r = 1$)とおくと、
\frac{\partial\symbfit{x}}{\partial\theta}=\left(\begin{matrix}-rsin\theta\\rcos\vartheta\\\end{matrix}\right),\ \ \frac{\partial\symbfit{x}}{\partial r}=\left(\begin{matrix}cos\theta\\sin\vartheta\\\end{matrix}\right)
となります。$∂x/∂θ$は曲線世界の基底ベクトル、$∂x/∂r$は我々が曲線世界を理解するために導入した法線ベクトルです。$θ$と$r$でさらに微分すると
\frac{\partial^2\symbfit{x}}{\partial\theta\partial\theta}=\left(\begin{matrix}-rcos\theta\\-rsin\theta\\\end{matrix}\right)=0\frac{\partial\symbfit{x}}{\partial\theta}-r\frac{\partial\symbfit{x}}{\partial r},\ \ \Gamma_{\ \ \ \theta\theta}^\theta=0,\ \ \Gamma_{\ \ \ \theta\theta}^r=-r
\frac{\partial^2\symbfit{x}}{\partial\theta\partial r}=\left(\begin{matrix}-sin\theta\\cos\theta\\\end{matrix}\right)=\frac{1}{r}\frac{\partial\symbfit{x}}{\partial\theta}+0\frac{\partial\symbfit{x}}{\partial r},\ \ \Gamma_{\ \ \ \theta r}^\theta=\frac{1}{r},\ \ \Gamma_{\ \ \ \ \theta r}^r=0
\frac{\partial^2\symbfit{x}}{\partial r\partial r}=\left(\begin{matrix}0\\0\\\end{matrix}\right)=0\frac{\partial\symbfit{x}}{\partial\theta}+0\frac{\partial\symbfit{x}}{\partial r},\ \ \Gamma_{\ \ \ rr}^\theta=0,\ \ \Gamma_{\ \ \ rr}^r=0
となり、$r = 1$で固定なので、
\frac{\partial^2\symbfit{x}}{\partial\theta\partial\theta}=\left(\begin{matrix}-cos\theta\\-sin\theta\\\end{matrix}\right)=0\frac{\partial\symbfit{x}}{\partial\theta}-\frac{\partial\symbfit{x}}{\partial r},\ \ \Gamma_{\ \ \ \theta\theta}^\theta=0,\ \ \Gamma_{\ \ \ \theta\theta}^r=-1
\frac{\partial^2\symbfit{x}}{\partial\theta\partial r}=\left(\begin{matrix}-sin\theta\\cos\theta\\\end{matrix}\right)=\frac{\partial\symbfit{x}}{\partial\theta}+0\frac{\partial\symbfit{x}}{\partial r},\ \ \Gamma_{\ \ \ \theta r}^\theta=1,\ \ \Gamma_{\ \ \ \ \theta r}^r=0
\frac{\partial^2\symbfit{x}}{\partial r\partial r}=\left(\begin{matrix}0\\0\\\end{matrix}\right)=0\frac{\partial\symbfit{x}}{\partial\theta}+0\frac{\partial\symbfit{x}}{\partial r},\ \ \Gamma_{\ \ \ rr}^\theta=0,\ \ \Gamma_{\ \ \ rr}^r=0
さらに、$θ$のみが変化しますので、以下の式のことのみを考えます。
\frac{\partial^2\symbfit{x}}{\partial\theta\partial\theta}=\left(\begin{matrix}-cos\theta\\-sin\theta\\\end{matrix}\right)=0\frac{\partial\symbfit{x}}{\partial\theta}-\frac{\partial\symbfit{x}}{\partial r},\ \ \Gamma_{\ \ \ \theta\theta}^\theta=0,\ \ \Gamma_{\ \ \ \theta\theta}^r=-1
$r = 1$で制限した極座標上での移動の際の基底ベクトルの変化を表す
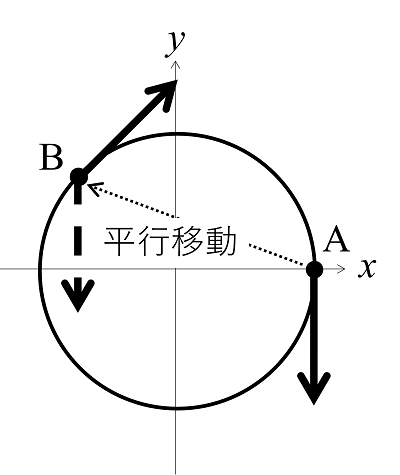
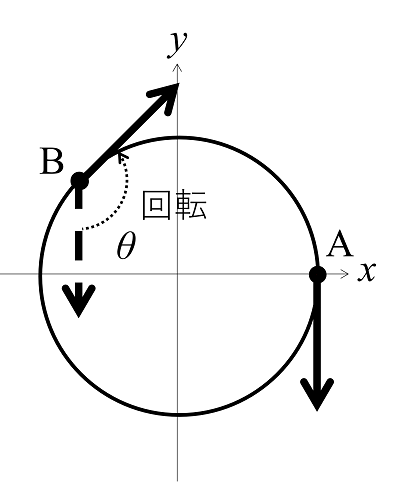
$∂^2x/∂θ∂θ$を見ると、基底ベクトルの軸上の移動を考える場合、我々が、曲線世界を理解するために導入した法線ベクトル$∂x/∂r$を考慮しなければいけないことがわかります。さらに、次の節で示すように、曲線世界の任意の座標$(sinθ, cosθ)$への基底$∂x/∂θ$の移動は$xy$座標でのベクトルの平行移動と一致しないことがわかります。$xy$座標での平行移動を優先すると終点でベクトルの向きの変化を必要とします。
曲線世界での最短距離の考え方
我々が観測すると、曲線世界をベクトルが移動する際、我々が導入した法線ベクトルの向きが変化します。曲線世界のベクトルは平行移動しかないので、我々の観測事実と一致しません。例えば、以下のルートでベクトルの平行移動を行う場合、始点Aと終点Bでの基底ベクトルは曲線世界のものが使えますが、その途中は、我々の$xy$平面での基底ベクトルで表現される平行移動となります。
従って、終点でベクトルの向きを一致する必要があり、回転操作をすることで、一次元人の世界のベクトルと一致します。
一次元人には、点A上のベクトルが消えたと思ったら、突然、点Bに表れたように感じるのかもしれません。
回転操作を伴うベクトルの変化が曲線世界に及ぼす影響は予測できませんが、仮に曲線世界の宇宙が存在していると仮定したら、ベクトルの向きの変化は概念として存在しないので、回転操作によって、宇宙が崩壊するのでしょうか。
宇宙の崩壊を避けるためには、移動の際に曲線世界とxy座標でベクトルの向きが変化しない経路を使って必要があります。
一次元世界の観察者からみて、曲線世界のベクトルの向きや法線ベクトルの向きが変化せずに移動するためには、曲線上の無限に小さい距離の移動を積み重ねる必要があります。つまり、円弧上での経路積分です。
こう考えると、曲線世界でのベクトルの最短距離での移動の理解の助けになるかもしれません。
おわりに
1次元世界の接続係数を妄想してみました。接続係数の有無で、$xy$座標の概念と曲線世界の概念の一致の有無を判定しました。
接続係数は係数なので、その数値の意味が重要になりますが、まだ、数値の意味を理解していません。共変微分の意味を理解する必要があるのでしょう。
それから、本稿を記述する際に、頭の片隅には、ハル・クレメント著「重力への挑戦」の設定がありました。また、曲線世界で最短距離を考える際の宇宙の崩壊を記述の際は、エドモンド・ハミルトン著「フェッセンデンの宇宙」を思い出しました。本稿はSFですので、物理学的に正しい場合がありますが、物語として楽しんでいただけたらと思います。
参考文献
ハル・クレメント著「重力への挑戦」
エドモンド・ハミルトン著「フェッセンデンの宇宙」