箱庭で TurtleBot3 を動かす:Windows + WSL2 向け QuickStart を公開しました
はじめに
箱庭 Getting Started に、Windows + WSL2 向けの QuickStart を追加しました。
この記事では、QuickStart の背景と、何が体験できるのかを紹介します。
詳細な手順は GitHub 側の QuickStart にまとめています。
箱庭とは
箱庭は、単体のシミュレータではなく、複数のシミュレータやアプリケーションを一つのシミュレーション世界として接続するためのプラットフォームです。
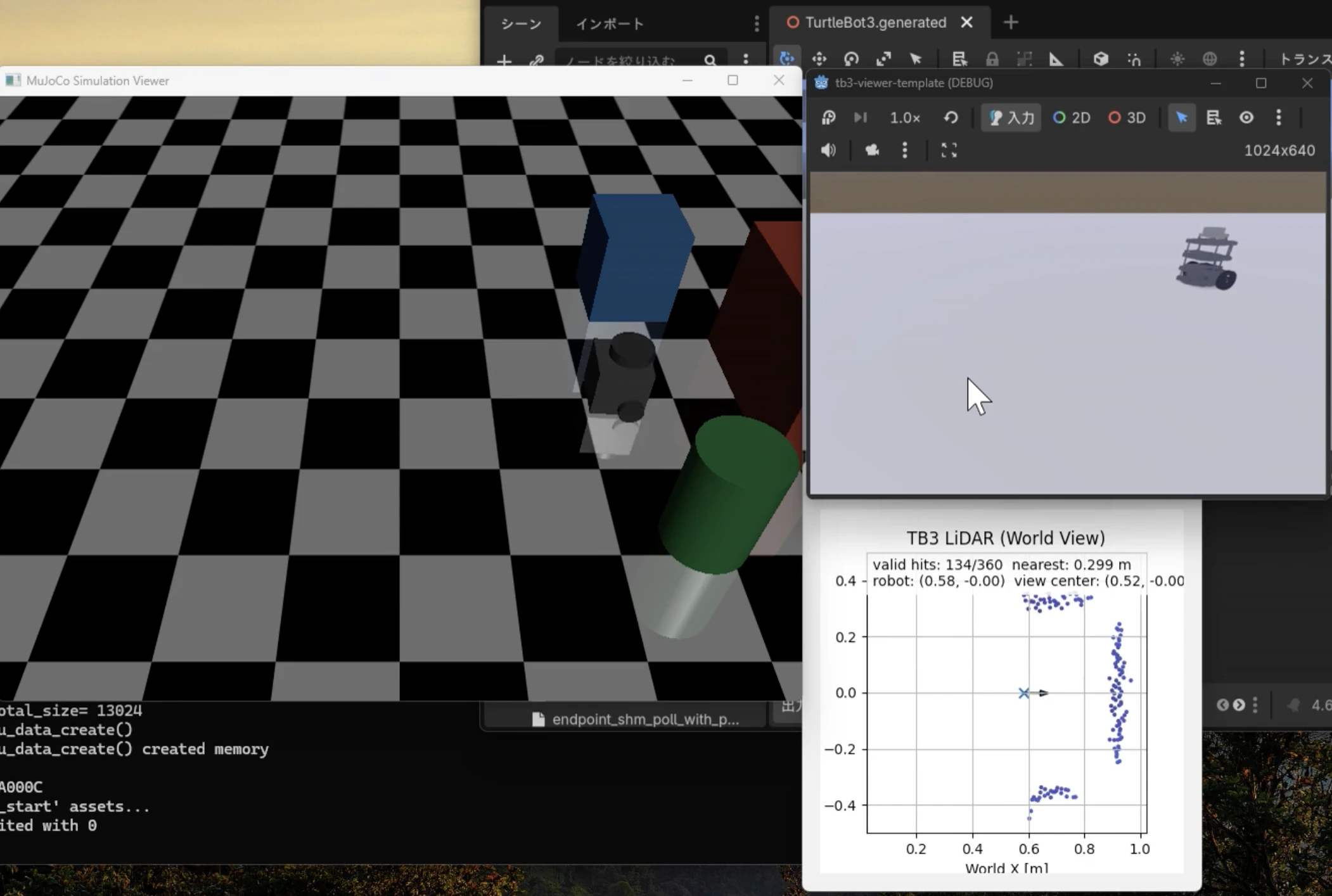
MuJoCo は物理演算、Godot は 3D 可視化、Python は制御アプリケーションというように、それぞれが得意な役割を担いながら、箱庭を介して同じ時刻の上で連携します。
今回のポイント
今回の TurtleBot3 は、ROBOTIS が公開している xacro / URDF 資産を起点に、箱庭のツール群で MuJoCo 用モデルや Godot 用表示モデルへ展開したものです。
既存の ROS ロボットモデル資産を活かしながら、MuJoCo、Godot、Python アプリを一つのシミュレーション世界として接続できる点が大きなポイントです。
体験できること
この QuickStart では、Windows + WSL2 環境で TurtleBot3 を起動し、ゲームパッドで操作するまでの手順を説明しています。
体験できる構成は以下です。
なぜ Windows + WSL2 から始めるのか
箱庭は MuJoCo、Godot、Python、C++、PDU、時刻同期など複数の要素を組み合わせて使うプラットフォームのため、「どこから触ればよいか分かりにくい」という声をいただくことがあります。
そこで今回は、手元で試しやすい Windows 環境を入口にしつつ、コマンドライン操作との相性から起動・確認作業には WSL2 を使う構成にしました。
実行環境の役割分担、バイナリ配置、起動確認、ログ確認、Godot の起動タイミングなど、実際に詰まりやすいポイントも整理しています。
実際の手順
手順の詳細は GitHub にまとめています。
-
GitHub リポジトリ
https://github.com/hakoniwalab/hakoniwa-getting-started -
Windows + WSL2 QuickStart
https://github.com/hakoniwalab/hakoniwa-getting-started/blob/main/docs/quick-start-win.md
デモ動画
TurtleBot3 を MuJoCo で動かし、Godot 側で可視化している様子です。
おわりに
まずは TurtleBot3 をゲームパッドで動かしながら、MuJoCo・Godot・Python が箱庭を介して一つのシミュレーション世界として接続される様子を体験してみてください。
今回のリリースにあたり、@buildko89 さん、@kuboaki さんに動作確認のご協力をいただきました。ありがとうございました。