概要
結論から言いますと,こういう環境が出来ました.
おそらくですが,上記のようなシミュレーション環境はオープンソースベースでは初めてではないのか?と思ったりしています.
理由
- オープンソースベースの AUTOSAR 実装はないと思われる
- オープンソースベースの RH850 のマイコンシミュレータはないと思われる(QEMUもやってない)
- オープンのソースベースで時間同期を含んだマルチECUシミュレーション環境はないと思われる
- さらに ROS2 でのCAN通信データのビジュアライズまでやっているのはあんまり聞かない.
なぜこういう環境を作れたのか?
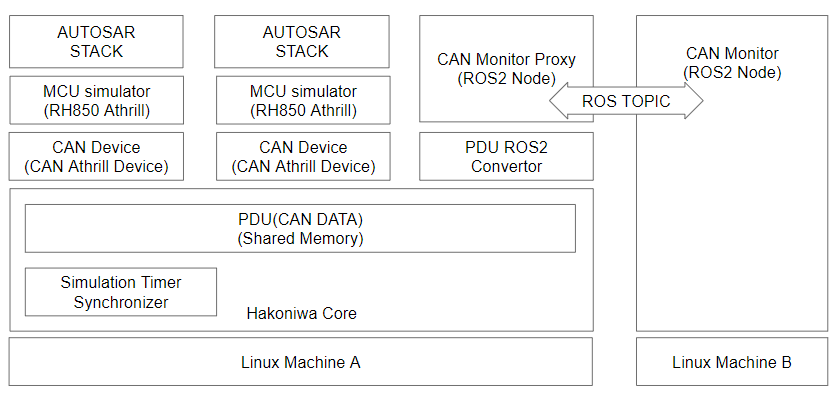
TOPPERS と箱庭WGがこれらの要素技術をすべてそろえてくれていた.
- AUTOSAR STACK
- MCU simulator
- CAN Device
- Hakoniwa Core
- CAN Monitor
前提環境
本環境は,Docker 上で環境構築しています.
なので,OSの要件は以下の通りです.
- OS
- Docker が動作する OS(WSL2, Linux, Mac)
なお,本環境のベースとなる情報は以下を良記事を参照ください!
利用手順
リポジトリ取得
git clone -b hako --recursive https://github.com/toppers/hakoniwa-ecu-multiplay.git
docker イメージを作成する
cd hakoniwa-ecu-multiplay/hako
bash docker/create-image.bash
端末を 5 個起動する
マルチECU環境なので,端末をたくさん立ち上げないといけないです...
- 端末A:箱庭マスタ機能の起動用
- 端末B:AUTOSARベースのCAN通信サンプルアプリ起動用
- 端末C:CANデータをROS2変換するROS2ノード起動用
- 端末D:ROS2トピック観測用
- 端末E:箱庭コマンド実行用
上記端末を立ち上げたら,以下の要領で docker コンテナを起動します.
端末A:箱庭マスタ機能の起動用
bash docker/run.bash
端末B:AUTOSARベースのCAN通信サンプルアプリ起動用
bash docker/attach.bash
cd $HAKO_WS_CAN
成功すると,CANプログラムが存在するディレクトリに移動しています.
# pwd
/root/workspace/a-comstack/can/target/hsbrh850f1k_gcc/sample
端末C:CANデータをROS2変換するROS2ノード起動用
bash docker/attach.bash
端末D:ROS2トピック観測用
bash docker/attach.bash
端末E:箱庭コマンド実行用
bash docker/attach.bash
マルチECUシミュレーション実行準備
端末A:箱庭マスタの起動
hako-master 1000 10000
成功した時のメッセージ:
START
INFO: shmget() key=255 size=7040
端末B:CAN通信プログラムの起動
hako-proxy ./proxy_config.json
成功した時のメッセージ:
add_option:/root/athrill-target-rh850f1x/athrill/bin/linux/athrill2
add_option:-c1
add_option:-i
add_option:-d
add_option:device_config_with_can_hako.txt
add_option:-m
add_option:memory_with_hako.txt
add_option:atk2-sc1.exe
INFO: PROXY start
端末C:CANデータをROS2変換するROS2ノードを起動
bash run.bash can_proxy rx
成功した時のメッセージ:
START:can_proxy_rx_node
端末E:箱庭コマンド実行する
ここまでで事前準備終了です.
まずは,箱庭コマンドで,箱庭アセットが登録されているか確認しましょう.
# hako-cmd ls
athrill_test_node
can_proxy_rx_node
上記のように2個のアセットが登録されていることがわかります.
次に,箱庭のシミュレーション状態をみてみましょう.
# hako-cmd status
status=stopped
シミュレーション停止状態ですね.
ということで,シミュレーション開始しましょう.
# hako-cmd start
start
# hako-cmd status
status=running
こうすると,これまでの端末上でログが出てきますが,まだ動きません.
なぜかというと,CAN通信プログラムを実行するマイコンシミュレータAthrillがデバッグモードになっているためです.
端末Bを見てみましょう.
pid:127
monitring:
exec_args_count=8
the_args[0]=/root/athrill-target-rh850f1x/athrill/bin/linux/athrill2
the_args[1]=-c1
the_args[2]=-i
the_args[3]=-d
the_args[4]=device_config_with_can_hako.txt
the_args[5]=-m
the_args[6]=memory_with_hako.txt
the_args[7]=atk2-sc1.exe
core id num=1
ROM : START=0x0 SIZE=1024
RAM : START=0xfede8000 SIZE=512
DEV : START=0xffff0000 SIZE=1024
ELF SET CACHE RIGION:addr=0x0 size=57 [KB]
Elf loading was succeeded:0x0 - 0xe680 : 57.640 KB
Elf loading was succeeded:0xe680 - 0x128c4 : 0.160 KB
ELF SYMBOL SECTION LOADED:index=16
ELF SYMBOL SECTION LOADED:sym_num=602
ELF STRING TABLE SECTION LOADED:index=17
DEBUG_FUNC_HAKO_ASSET_NAME = athrill_test_node
DEBUG_FUNC_HAKO_ASSET_NAME = athrill_test_node
DEBUG_FUNC_HAKO_PUB_0 = channel0/CAN_IDE0_RTR0_DLC8_0x001/0
create_channel: id=0 size=28
DEBUG_FUNC_HAKO_SUB_0 = channel0/CAN_IDE0_RTR0_DLC8_0x123/1
DEBUG_FUNC_HAKO_SUB_1 = channel0/CAN_IDE0_RTR0_DLC8_0x122/2
DEBUG_FUNC_HAKO_SUB_2 = channel0/CAN_IDE0_RTR0_DLC8_0x003/3
DEBUG_FUNC_HAKO_SUB_3 = channel0/CAN_IDE0_RTR0_DLC8_0x004/4
DEBUG_FUNC_HAKO_ASSET_NAME = athrill_test_node
DEBUG_FUNC_FT_LOG_SIZE=1024
[DBG>
HIT break:0x0
[NEXT> pc=0x0 prc_support.S 256
こんな感じで,0x0番地でブレーク状態になっています.
さっそく,cコマンドで,Athrillのシミュレーションを開始すると,以下のように動き出します.
c
[CPU>
TOPPERS/ATK2-SC1 Release 1.4.2 for HSBRH850F1K (Aug 12 2022, 21:12:59)
== finished StartupHook ==
== Can_Init ==
== CanIf_ControllerModeIndication(0, 2) ==
LOADED: PDU DATA
CANデータ送信するログ(例):
== CanIf_TxConfirmation(3) ==
[FCN0] Can_Write(3) CAN-ID:0x1
DATA[0]:0x5
DATA[1]:0x6
DATA[2]:0x7
DATA[3]:0x8
DATA[4]:0x9
DATA[5]:0xa
DATA[6]:0xb
DATA[7]:0xc
== finished SendTask ==
== CanIf_TxConfirmation(3) ==
端末D:ROS2トピック観測する
端末Dで,ROS2トピック観測する準備をします.
source install/setup.bash
この状態で,トピック一覧を見てみましょう.
ros2 topic list
/channel0/CAN_IDE0_RTR0_DLC8_0x1
/parameter_events
/rosout
/channel0/CAN_IDE0_RTR0_DLC8_0x1 というのが,送信されているCANデータのROS2トピックになります.
では,これを見てみましょう.
ros2 topic echo /channel0/CAN_IDE0_RTR0_DLC8_0x1
こんな感じで,CAN通信データのヘッダ情報と中身のデータが見えますね!
head:
channel: 0
ide: 0
rtr: 0
dlc: 8
canid: 1
body:
data:
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
デモ
操作イメージのデモはこんな感じです.

その他
今回はCAN通信モジュールのシミュレーションしかお見せしていませんが,RTEを含めたシミュレーションも可能です.
また,本シミュレーション環境は,GitHub Codespacesでも体験できるようにしたいと考えておりますので,乞うご期待ください.
お知らせ:箱庭もくもく会
TOPPERS箱庭WGでは,もくもく会を不定期に開催しています.
本記事の内容を実際に試してみたい方や試してみたけど詰まっている方は,ぜひご参加ください.画面共有しながら参加者同士でサポートしたり,一緒に新しい機能を実装したりと”もくもく”しましょう.