本記事は「 TTDC Advent Calendar 2025 」 23日目の記事です。
はじめに
第2回MAGP(Minicar Autonomous Grand Prix) という自動運転ミニカーコンペにTTDCとして参加してきました。
MAGPでは大きく分けて、モデル制御ベースと機械学習モデルベースの2つのアプローチがあります。
我々TTDCチームは「自動運転の仕組みを学ぶ」ことを目的に、あえてモデル制御ベースを採用しました。
結果は予選敗退でしたが、約5分かけて既定コースを1周完走できました!
※参考までに予選1位のチームは機械学習モデルベースによって15秒で1周していました。
本記事では MAGPの紹介と制御ロジック改善の話、そして大会を通じて学んだことをまとめ、少しでもMAGPに興味を持ってもらえたら嬉しいと思っています。
MAGPとは
MAGP は、1/10スケールのラジコンカーを使った「自律走行技術の競技会」です。
共通の車体をベースに、学習・認識・計画・制御といった自動運転技術を駆使し、速さと技術を競います。
大会は、研究者・学生・エンジニアが交流し、ハードウェアからソフトウェアまで幅広い技術を学べる場として設立されました。
公式サイトはこちら。
現在は第2回まで開催されており、第3回は来年2026年の5月に開催予定です。
制御について
まず初めに簡単に今回の制御までの流れについて説明します。
- コースマップを作成
- コースマップから実際に走る経路を作成
- 実際に走らせ、車体を制御
3の車体制御は0.1秒周期で以下の流れで実施します。
- コースマップ上のどの位置にいるのかと車体の向きを取得(詳しい内容は本記事では省きます)
- 取得した情報から次の周期までのハンドル角度と速度を制御(今回はこのことを車体制御と呼びます)
まず初めに取り組んだ車体制御はpure pursuitでした。
pure pursuit
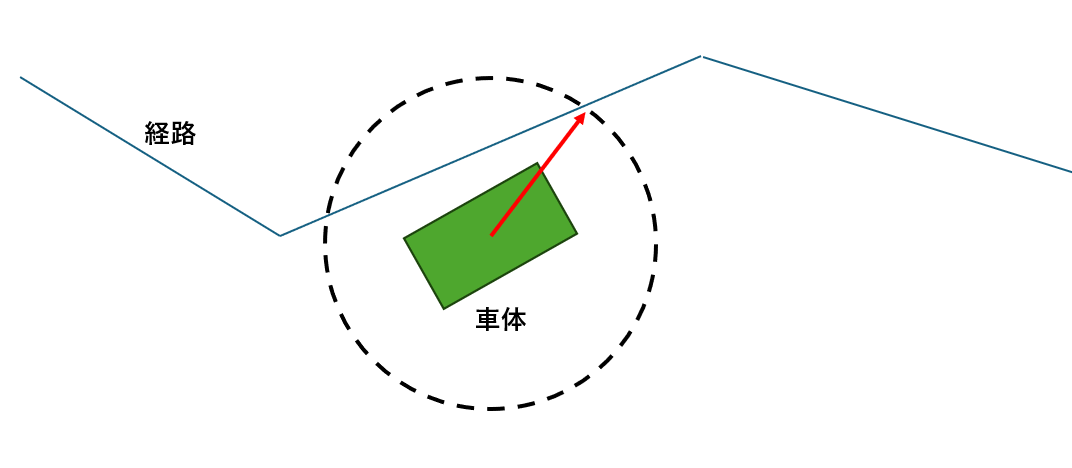
pure pursuitは下の図のように経路に対して、一定距離(Look ahead distance)先の点を目標点(Target point)にし、その点に到達するような制御ロジックです。
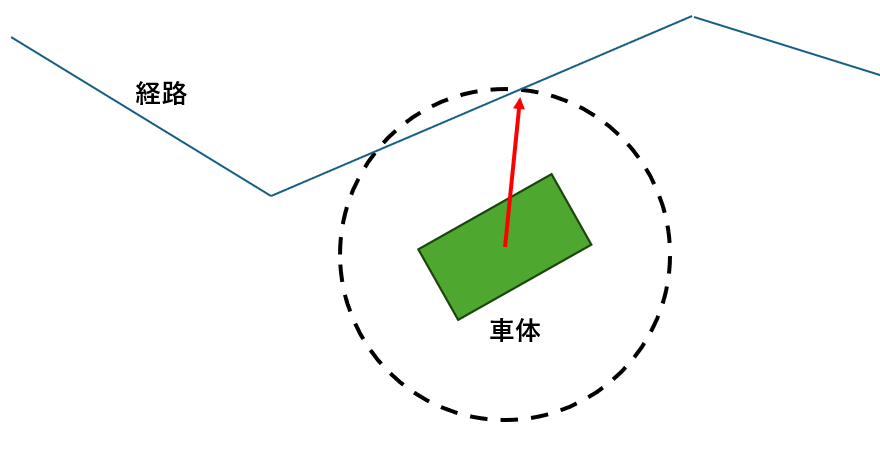
pure pursuitには問題点もあり、下の図のように、一度経路から離れてしまった場合、
よりハンドル角度を大きく切って元の経路に戻ろうとしてしまいます。
そのため、経路に対してより振動的な経路をとってしまいます。
そこで少し改良を加えたpure pursuitを本番では採用しました。
pure pursuit改良版
できるだけ振動を抑えるために下記画像の様な制御ロジックに変更しました。
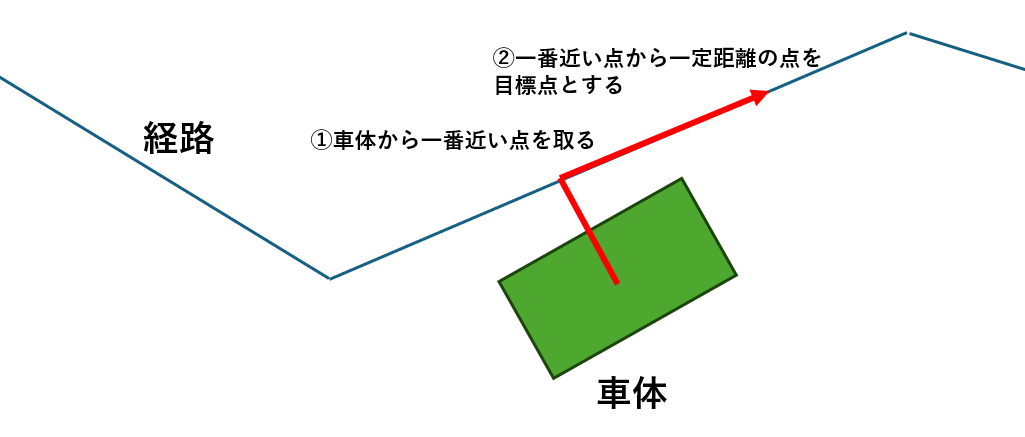
このロジックを採用することで、速度はそれほど上げられませんでしたが、
振動の抑制や経路から少し離れてしまったときの復帰率が向上し、安定的にコースを走ることができました。
大会を通じて得た学び
今回は予選敗退という結果に終わってしまいましたが、自己位置推定の精度や機体のスペック等の条件を加味したら、既定コースを1周完走できたことは自分の中では非常に満足感がありました。
3日目の決勝も見学させていただきましたが、前のラジコンを追い抜く戦略や壁にぶつかっても自動で復帰するアルゴリズムなど他のチームの技術量の高さには驚きました。
また、車の自動運転の仕組みを学んだり、実機を触るいい機会になりました。
終わりに
次回大会は来年2026年の5月に開かれるということで、今回はモデル制御ベースでしたが、機械学習等も視野に入れて、挑戦したいと考えています。
この記事を読んで少しでも興味を持っていただければ、是非MAGPに参加してみてはどうでしょうか?